Изобретение относится к гидроакустике, технической акустике и может быть использовано в гидроакустических системах для оценки углового положения шумящих целей, принимаемых в условиях действия импульсных помех.
В пеленговании источников излучения актуальной является задача поддержания непрерывного акустического контакта с объектом при приеме его сигнала на фоне импульсных помех - одиночных или повторяющихся, более или менее длительных, узкополосных или широкополосных, различной интенсивности и т.д. Эти помехи порождаются работой активных режимов, как принадлежащих гидроакустической системе, в составе которой реализуется пеленгование, так и не связанных с ней. Еще одним источником импульсных помех являются биошумы - крики крупных морских животных. В первом случае может использоваться какая-то априорная информация о параметрах импульсных помех, во втором - такая информация в принципе отсутствует и должна быть получена и затем использована в процессе пеленгации сигнала.
Мешающее воздействие суммарного поля помехи, в особенности сильных импульсных сигналов, спектр которых сосредоточен в полосе частот пеленгуемого источника, приводит к подавлению сигнала источника, к ошибкам измерения пеленга и затрудняет решение актуальных задач наблюдения и автоматического сопровождения объекта, вплоть до полной потери контакта, и к необходимости работы оператора с целью восстановления контакта с пеленгуемым объектом после прекращения действия импульсной помехи.
Определение координат источника излучения возможно как в пассивном (шумопеленгование), так и в активном режиме (гидролокация). При этом в активном режиме при сопровождении сигнала и оценке его параметров используется излучение сильных зондирующих импульсных сигналов, в пассивном же режиме, предназначенном для сопровождения непрерывных сигналов, наличие импульсных составляющих на входе приемного тракта является помехой.
Известен оптимальный способ определения угла прихода плоской волны шумового источника сигнала, принимаемого линейной эквидистантной антенной решеткой (ЛЭАР), описанный в книге [Лоскутова Г.В., Полканов К.И. Пространственно-частотные и частотно-волновые методы описания и обработки гидроакустических полей. - СПб.: Наука, 2007. - 239 с., 53 ил. стр. 150-152]. В этом способе используется информация о взаимных спектральных плотностях мощности (ВСПМ) помех, на фоне которых принимается сигнал, на всех приемных элементах (ПЭ) антенны, коэффициент частотной характеристики, зависящий от спектральных плотностей мощности помехи и сигнала, результат многомерной пространственно-частотной фильтрации входных процессов с учетом матрицы, обратной к матрице ВСПМ, и фазирования затем ЛЭАР в опорном направлении с единичным распределением и с распределением, зависящим от производной по искомому параметру величин задержек фронта сигнала на элементах приемной АР.
Недостатком этого способа является его нереализуемость, поскольку в реальных системах матрица ВСПМ помех на ПЭ ЛЭАР, также как и спектральные плотности мощности помехи и сигнала неизвестны, к тому же способ описан только для ЛЭАР. Кроме того, этот алгоритм не учитывает возможное изменение пеленга на источник сигнала на временном интервале обработки.
Известен способ определения угла прихода плоской волны шумового источника сигнала с использованием 2-х-канального цифрового дискриминатора угла (ДУ), описанный, например, в уже упомянутой книге [Лоскутова Г.В., Полканов К.И., стр. 174]. Он содержит:
формирование на антенной решетке двух фазированных в опорном направлении каналов с разнесенными фазовыми центрами, что достигается разбиением антенны (апертурного окна) на две непересекающиеся части, дискретное преобразование Фурье выходов этих каналов на конечном интервале времени, вычисление выходной величины канала измерения, пропорциональной угловому рассогласованию и равной накопленной на нескольких тактах преобразования Фурье взвешенной сумме в полосе частот мнимых частей произведения спектра одного канала на комплексно-сопряженный спектр второго канала, вычисление выходной величины канала нормирования, равной осредненной на большем, чем в канале измерения, числе тактов преобразования Фурье взвешенной сумме в полосе частот реальных частей произведения спектра одного канала на комплексно-сопряженный спектр второго канала, причем весовое суммирование в полосе частот осуществляется с частотно-зависимыми коэффициентами, принятыми при вычислении канала измерения, дополнительно умноженными на значение частоты, вычисление оценки угла рассогласования путем деления выходной величины канала измерения на выходную величину канала нормирования и вычисление оценки угла как суммы угла фазирования АР и оценки угла рассогласования. Особенностью этого ДУ является стабильность крутизны его пеленгационной характеристики при изменении как уровня, так и формы спектра принимаемого сигнала; кроме того, данный алгоритм оценки угла не требует больших вычислительных затрат. Способ может применяться для антенных решеток различных форм и хорошо работает при пеленговании сигнала неподвижного объекта, принимаемого на фоне изотропных помех. Недостатком данного способа является то, что в нем используется статическое накопление и при движущемся источнике и/или носителе приемной системы и большом времени накопления Тн возникают значительные динамические ошибки пеленгования из-за инерционности накопителя, зависящие от скорости относительного перемещения источника и приемника.
Наиболее близким к предлагаемому изобретению является способ определения угла прихода сигнала движущегося источника двухканальной приемной системой, описанный в [Лоскутова Г.В., Полканов К.И., с. 139].
В этом способе устранен недостаток, обусловленный статическим накоплением за заданное время Тн в схеме измерения направления на движущийся источник и/или при подвижном носителе приемной системы, который приводит к ошибкам определения координат, зависящим от скорости относительного перемещения источника и приемников. Для этого используются измерительное устройство, содержащее дискриминатор измеряемого параметра, и динамическое сглаживающее устройство. В данном способе используют приемную антенну со сформированными на ней двумя каналами с фазовыми центрами, разнесенными на расстояние dф (две половины антенны). Оба канала фазируют независимо, но в одном назначенном опорным направлении αon.
Для определения искомого неизвестного направления αs по сигналам обоих каналов измеряют величину отклонения опорного направления αon от искомого неизвестного αs, а потом корректируют опорное направление на величину измеренного отклонения. Для этого используют накопленный на малом интервале времени T0 (T0<Тн) взаимный спектр плотности мощности (ВСПМ) сигналов двух сформированных каналов и определяют выходную величину «канала измерения» b1, пропорциональную угловому отклонению δα=αs-αon и выходную величину «канала нормирования» b2. Далее определяют малоосредненную (полученную на интервале времени T0) оценку δα угла отклонения δα=αs-αon в соответствии с выражением:  , где
, где  - масштабный коэффициент, учитывающий геометрию приемной системы, с - скорость звука, dф - расстояние между фазовыми центрами половин антенны. Измеренную таким образом оценку угла рассогласования используют для корректировки опорного направления, получая малоосредненную оценку αм, которую подвергают накоплению до требуемого времени осреднения Тн либо прямым, статическим, способом, при малой скорости перемещения объекта, либо известными методами динамического сглаживания последовательности измерений, используя, например, метод наименьших квадратов, фильтр Калмана [Сейдж Э., Мелс Дж. Теория оценивания и ее применение в евзи и управлении: Пер. с англ./ Под ред. Б.Р. Левина. - М. Связь, 1976. - 496 с.] или алгоритм α-β-фильтрации [С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986. - 352 с. Стр. 163-166]. Преимуществом данного способа является пеленгование в динамическом режиме слежения.
- масштабный коэффициент, учитывающий геометрию приемной системы, с - скорость звука, dф - расстояние между фазовыми центрами половин антенны. Измеренную таким образом оценку угла рассогласования используют для корректировки опорного направления, получая малоосредненную оценку αм, которую подвергают накоплению до требуемого времени осреднения Тн либо прямым, статическим, способом, при малой скорости перемещения объекта, либо известными методами динамического сглаживания последовательности измерений, используя, например, метод наименьших квадратов, фильтр Калмана [Сейдж Э., Мелс Дж. Теория оценивания и ее применение в евзи и управлении: Пер. с англ./ Под ред. Б.Р. Левина. - М. Связь, 1976. - 496 с.] или алгоритм α-β-фильтрации [С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986. - 352 с. Стр. 163-166]. Преимуществом данного способа является пеленгование в динамическом режиме слежения.
Тем не менее, способ имеет существенный недостаток: он не защищен от воздействия сильных импульсных помех, на фоне которых осуществляется прием полезного сигнала, что приводит к смещению оценок пеленга и увеличению флуктуационной погрешности их измерения вплоть до потери контакта.
Задачей изобретения является обеспечение устойчивого акустического контакта с движущимся источником излучения, принимаемым на фоне сильной импульсной помехи, и повышение точности определения пеленга.
Технический результат заключается в повышении надежности сопровождения по пеленгу сигнала движущегося источника излучения в условиях действия импульсных помех, без снижения точности пеленгования и без участия оператора, путем исключения временных фрагментов действия импульсных помех из обработки сигнала.
Для обеспечения указанного технического результата в способ пеленгования движущегося источника излучения, при котором на каждом цикле обработки формируют на антенной решетке два направленных в одном опорном направлении канала с разнесенными фазовыми центрами, оценивают разность фаз сигналов на их выходе и пересчитывают ее в угловое рассогласование между углом прихода сигнала и опорным направлением, получая оценки пеленга, осредненные на интервале времени Т0, равном нескольким циклам обработки, динамически накапливают их на большом интервале времени Тн>>Т0, формируя оценку пеленга и величины изменения пеленга, введены новые признаки, а именно: на каждом цикле обработки формируют оценку огибающей сигнала на выходе сформированных каналов, для чего выходы сформированных каналов на каждом цикле обработки квадрируют, суммируют в частотной полосе обработки и накапливают на заданном интервале времени, сравнивают полученную оценку огибающей с ее оценкой на предыдущем цикле обработки и, если текущее значение оценки огибающей больше удвоенного предыдущего ее значения, принимают решение о наличии импульсной помехи, организуют счетчик циклов обработки в условиях действия импульсной помехи, и на циклах, отмеченных счетчиком, оценку разности фаз сигналов на выходе сформированных каналов не выполняют, осредненную на интервале времени Т0 оценку пеленга не вычисляют, оценку величины изменения пеленга не корректируют, а сохраняют ее и значение уровня огибающей сигнала предыдущего цикла на следующий за ним цикл как текущие значения, в качестве опорного направления при формировании двух пространственных каналов на каждом следующем цикле обработки используют результат экстраполяции оценки пеленга на время, равное длительности цикла обработки, с учетом полученной к текущему циклу оценки величины изменения пеленга, а если текущее значение оценки огибающей меньше удвоенного ее значения на предыдущем цикле, принимают решение об отсутствии импульсной помехи, вычисляют осредненную на интервале времени Т0 оценку пеленга без учета циклов обработки в условиях действия импульсной помехи, а определение оценки пеленга на текущем цикле производят при осуществлении динамического накопления оценок пеленга на интервале времени Тн без учета циклов обработки в условиях действия импульсной помехи, рассчитывая коэффициенты динамического накопления оценок пеленга и величины его изменения так, как если бы пропущенных циклов обработки не было.
Достижение заявленного технического результата основано на том, что импульсные гидроакустические помехи как техногенного, так и биологического происхождения могут быть достаточно сильными, но время их действия ограничено (от миллисекунд до единиц секунд), так что координаты источника шумового сигнала в водной среде за время действия импульсной помехи изменяются незначительно. Это позволяет исключить из обработки интервалы времени, когда действуют импульсные помехи, но требует соответствующей организации работы пеленгатора. В процессе его работы необходимо определять момент появления и окончания действия сильной импульсной помехи, т.е. оценивать поведение огибающей сигнала на выходе канала, сформированного в направлении на источник сигнала. При резком (более чем в два раза) увеличении уровня сигнала на i-м цикле обработки этот и следующие за ним циклы исключаются из обработки до тех пор, пока не закончится действие импульсной помехи. При этом сохраняется информация об оценке пеленга α0(i-1), величине его изменения (ВИП) V(i-1) и об уровне сигнала на выходе сформированного канала А0=A(i-1), полученных на последнем цикле обработки до появления импульсной помехи. Эти оценки используются для экстраполяции пеленга на объект на текущий цикл обработки: α0(i)=α0(i-Y)+V(i-1)Тобр, где Тобр - длительность цикла обработки, и для поддержания акустического контакта с сопровождаемым сигналом на следующем цикле, что достигается формированием двух каналов в экстраполированном направлении а0(i). Сохраненный на последнем цикле обработки до появления импульсной помехи уровень сигнала A0 сравнивается с текущим его уровнем, и если они отличаются менее чем в два раза, принимается решение о прекращении действия импульсной помехи, после чего восстанавливается обычный режим работы пеленгатора, причем в алгоритме динамического накопления оценок пеленга на большом интервале времени Тн не учитывается время действия импульсной помехи.
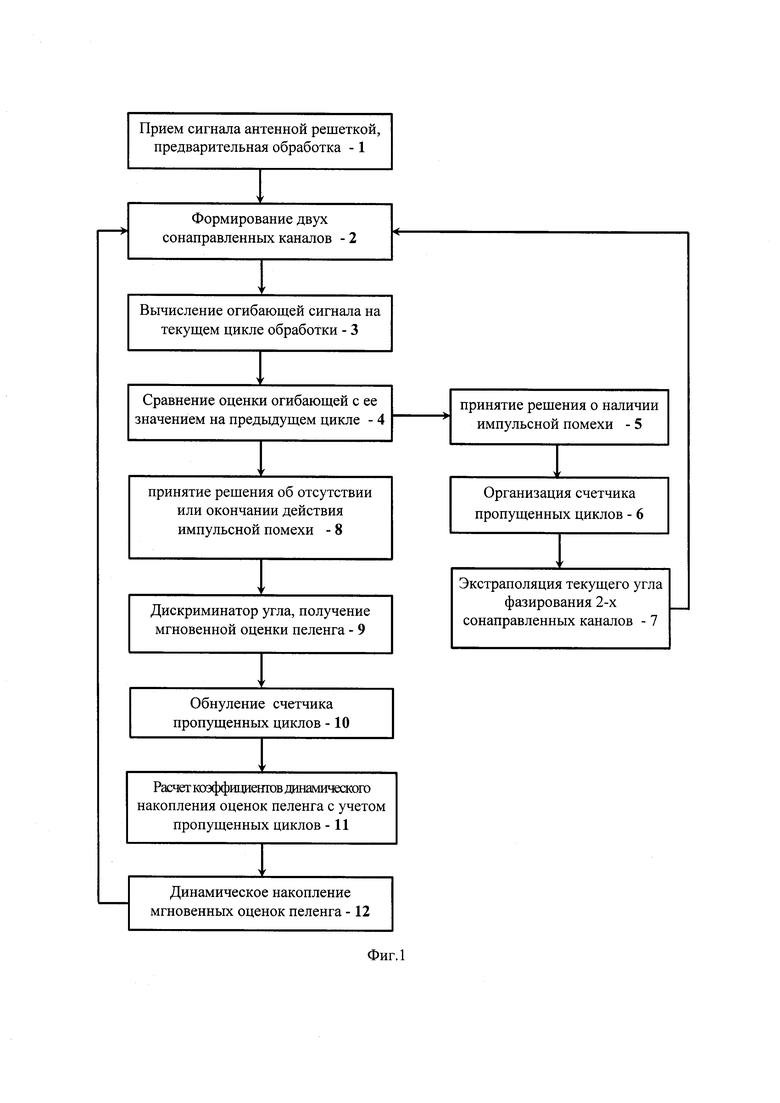
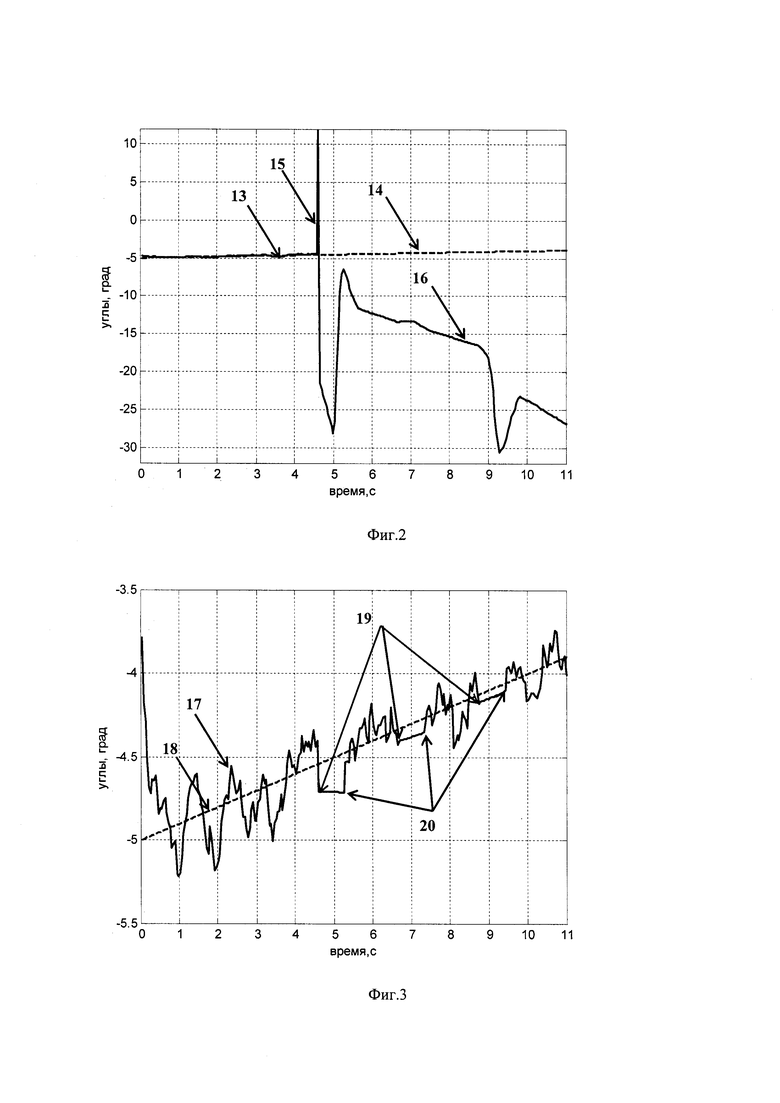
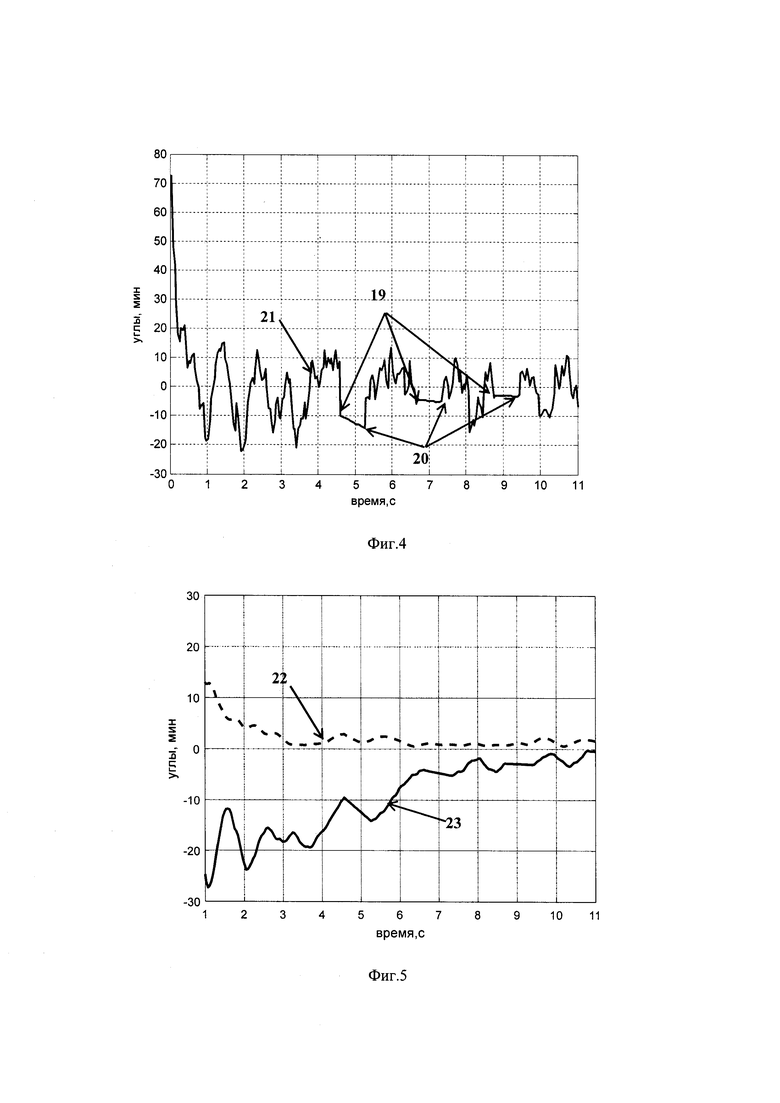
Предлагаемое изобретение иллюстрируется графическими изображениями, на которых показаны: на фиг. 1 - блок-схема способа пеленгования как последовательность операций, фиг. 2 - результат влияния сильных импульсных помех на работу пеленгатора по способу-прототипу, фиг. 3 - результат применения предлагаемого способа пеленгования движущегося источника излучения при наличии сильных импульсных помех, фиг. 4 - смещение малоосредненных оценок пеленга при применении предлагаемого способа пеленгования при наличии сильных импульсных помех, фиг. 5 - смещение и дисперсия динамически накопленных на большом интервале времени оценок пеленга.
На фиг. 2 обозначены: 13 - оценки пеленга до начала действия импульсной помехи (ИП), 14 - угол прихода сигнала, 15 - оценка пеленга в начале действия ИП, 16 - оценки пеленга при действии ИП способом-прототипом.
На фиг. 3 обозначены: 17 - оценки пеленга предлагаемым способом при воздействии сильной ИП, 18 - угол прихода сигнала, 19 - моменты начала действия ИП, 20 - моменты окончания действия ИП.
На фиг. 4 обозначены: 21 - смещение мгновенных оценок пеленга при применении предлагаемого способа пеленгования движущегося источника излучения при наличии сильных импульсных помех; 19 - моменты начала действия ИП, 20 - моменты окончания действия ИП.
На фиг. 5 обозначены: 22 - дисперсия и 23 - смещение динамически накопленных на большом интервале времени оценок пеленга.
Способ пеленгования реализуется устройством - шумопеленгаторной станцией с системой цифровой пространственно-частотно-временной обработки сигналов (см. Корабельная гидроакустическая техника. Корякин Ю.А., Смирнов С.А., Яковлев Г.Н., СПб., Наука, 2004 г., стр. 53)
Реализация предлагаемого способа в соответствии с фиг. 1 осуществляется следующим образом.
В блоке 1 принятые многоэлементной гидроакустической антенной акустические сигналы, содержащие шумы моря (изотропный шум) и сигналы локальных источников излучения, преобразуются в электрические сигналы и проходят первичную обработку: усиление, частотную фильтрацию, цифровое преобразование, ограничение полосы частот, циклическое преобразование Фурье (ПФ) с заданным интервалом Тобр, в результате которого на выходах блока 1, соединенных с соответствующими входами блока 2, получают сигналы в частотной области xi(f), где i - номер приемного элемента (ПЭ) антенны, ƒ∈[ƒH÷ƒB] (ƒH и ƒB - нижняя и верхняя частота полосы обработки соответственно). В блоке 2 формируют на антенной решетке два направленных в одном опорном направлении αon канала Y1(f) и Y2(f), с разнесенными на расстояние dф фазовыми центрами, что достигается разбиением антенны (апертурного окна) на две непересекающиеся части - левую (ЛП) и правую (ПП):  - фазирующие коэффициенты, компенсирующие задержки τi(αon) времени распространения фронта волны сигнала на элементах приемной антенны, τi(αon) рассчитываются по формулам тригонометрии для каждого приемного элемента. В блоке 3 на каждом цикле обработки с номером j формируют и сохраняют на следующий цикл оценку огибающей сигнала A(j) на выходе сформированных каналов, для чего выходы сформированных каналов на каждом цикле ПФ обработки квадрируют, суммируют в пределах частотной полосы обработки ƒ=ƒH÷ƒB и накапливают на заданном интервале времени (Тобр÷3Тобр). В блоке 4 производится сравнение оценки огибающей с ее значением на предыдущем цикле. Если A(j)>2A(j-1), то в блоке 5 принимается решение о наличии импульсной помехи на входе приемной антенны и сохраняются значения полученных на предыдущем цикле обработки динамически накопленных на интервале времени Тн оценок пеленга α0=αs(j-1) и величины изменения пеленга V0=V(j-1) и текущая оценка огибающей сигнала A0=A(j-1). В блоке 6 организуют счетчик пропущенных из-за влияния сильной импульсной помехи циклов обработки (М), а оценку огибающей сигнала на таких тактах заменяют на ее значение на последнем цикле до начала действия импульсной помехи: A(j)=A0. В блоке 7 оценки α0 и V0 используют для экстраполяции оценки пеленга на объект на текущий цикл обработки: αon(j)=α0+V0TобрM, где Тобр - длительность цикла обработки, М - значение счетчика пропущенных циклов. Значение αon(j) используется для формирования двух сонаправленных каналов на следующем цикле обработки (блок 2). Если на очередном цикле оценка огибающей не превосходит удвоенного ее значения на предыдущем цикле: A(j)<2A(j-1), то принимается решение об отсутствии (или прекращении действия) импульсной помехи (блок 8). В блоке 9 формируют выходную величину канала измерения:
- фазирующие коэффициенты, компенсирующие задержки τi(αon) времени распространения фронта волны сигнала на элементах приемной антенны, τi(αon) рассчитываются по формулам тригонометрии для каждого приемного элемента. В блоке 3 на каждом цикле обработки с номером j формируют и сохраняют на следующий цикл оценку огибающей сигнала A(j) на выходе сформированных каналов, для чего выходы сформированных каналов на каждом цикле ПФ обработки квадрируют, суммируют в пределах частотной полосы обработки ƒ=ƒH÷ƒB и накапливают на заданном интервале времени (Тобр÷3Тобр). В блоке 4 производится сравнение оценки огибающей с ее значением на предыдущем цикле. Если A(j)>2A(j-1), то в блоке 5 принимается решение о наличии импульсной помехи на входе приемной антенны и сохраняются значения полученных на предыдущем цикле обработки динамически накопленных на интервале времени Тн оценок пеленга α0=αs(j-1) и величины изменения пеленга V0=V(j-1) и текущая оценка огибающей сигнала A0=A(j-1). В блоке 6 организуют счетчик пропущенных из-за влияния сильной импульсной помехи циклов обработки (М), а оценку огибающей сигнала на таких тактах заменяют на ее значение на последнем цикле до начала действия импульсной помехи: A(j)=A0. В блоке 7 оценки α0 и V0 используют для экстраполяции оценки пеленга на объект на текущий цикл обработки: αon(j)=α0+V0TобрM, где Тобр - длительность цикла обработки, М - значение счетчика пропущенных циклов. Значение αon(j) используется для формирования двух сонаправленных каналов на следующем цикле обработки (блок 2). Если на очередном цикле оценка огибающей не превосходит удвоенного ее значения на предыдущем цикле: A(j)<2A(j-1), то принимается решение об отсутствии (или прекращении действия) импульсной помехи (блок 8). В блоке 9 формируют выходную величину канала измерения:
 , где накопление по времени осуществляется только по тем циклам, когда импульсной помехи не было,
, где накопление по времени осуществляется только по тем циклам, когда импульсной помехи не было,
с аналогичным условием вычисляют выходную величину канала нормирования:

вычисляют оценку угла рассогласования между углом прихода сигнала и опорным направлением:
 , где
, где  - масштабный коэффициент, учитывающий геометрию приемной системы, с - скорость звука, dф - расстояние между фазовыми центрами половин антенны, и получают оценку пеленга как сумму угла наведения и угла рассогласования: αs=αon+δα на текущем цикле обработки. В блоке 10 обнуляется счетчик пропущенных циклов обработки: М=0. В блоке 11 на каждом цикле вычисляются коэффициенты динамического накопления пеленга и величины изменения пеленга, которые используются в блоке 12 для динамического накопления оценок пеленга. Результат такого накопления используется на следующем цикле обработки для корректировки направления фазирования приемной антенны и формирования двух сонаправленных каналов (блок 2).
- масштабный коэффициент, учитывающий геометрию приемной системы, с - скорость звука, dф - расстояние между фазовыми центрами половин антенны, и получают оценку пеленга как сумму угла наведения и угла рассогласования: αs=αon+δα на текущем цикле обработки. В блоке 10 обнуляется счетчик пропущенных циклов обработки: М=0. В блоке 11 на каждом цикле вычисляются коэффициенты динамического накопления пеленга и величины изменения пеленга, которые используются в блоке 12 для динамического накопления оценок пеленга. Результат такого накопления используется на следующем цикле обработки для корректировки направления фазирования приемной антенны и формирования двух сонаправленных каналов (блок 2).
Работоспособность предлагаемого способа пеленгования движущегося источника излучения при воздействии импульсных помех подтверждена проверкой на записях сигналов, выполненных в натурных условиях, и имитационным моделированием сигнала и помех выходе на приемных элементов антенны и алгоритма его пеленгования.
В модели на фиг. 2-5 использована плоская многоэлементная антенная решетка, полоса сигнала ΔF - одна октава, ширина нормированной характеристики направленности (на уровне 0,7, на средней частоте диапазона) θ0,7 сформированного канала, θ0.7≈6.4°; помеха и сигнал - широкополосные, угол прихода сигнала изменяется от -5° до -3.9° с угловой скоростью 0.1°/с, угол прихода импульсной помехи - по нормали к антенне (0°), длительность каждого импульса 0.625с, период следования импульсов 2.1с, начало первого импульса в момент t=4.6с; уровень импульсной помехи на выходе приемного элемента антенны в 10 раз больше уровня сигнала.
Как видно из приведенного на фиг. 2 графика, в момент прихода первого импульса помехи, отстоящей по азимуту от сигнала на величину, сравнимую с шириной характеристики направленности, происходит срыв пеленгования сигнала способом-прототипом. В то же время использование предлагаемого способа пеленгования (рисунок фиг. 3) позволяет устойчиво сопровождать по пеленгу сигнал движущегося источника, при этом на графике отчетливо видны временные фрагменты, связанные с приемом сигнала на фоне сильной помехи, в течение которых оценка пеленга на осуществлялась, но акустический контакт поддерживался на основе выработанных оценок пеленга и величины изменения пеленга. На графике фиг. 4 приведено смещение мгновенных оценок пеленга, а на фиг. 5 соответственно дисперсия и смещение динамически накопленных на большом интервале времени оценок пеленга при применении предлагаемого способа пеленгования движущегося источника излучения при наличии сильных импульсных помех. Как видно, применение предлагаемого способа пеленгования движущегося источника излучения при воздействии импульсной помехи уже через 6 с после начала сопровождения сигнала дает практически несмещенную оценку пеленга.
Количественные результаты вышеописанного моделирования, отраженные в рисунке фиг. 5, следующие:
- смещение оценок пеленга уже через 6 с после начала сопровождения сигнала составляет 3 угловые минуты;
- дисперсия оценок пеленга составляет 1-3 угловые минуты, причем дисперсия оценок до начала действия ИП (с t=3с по t=4.6 с) и в результате предлагаемого способа пеленгования при действии ИП (начиная с t=4.6 с) не увеличилась.
Таким образом, результаты моделирования демонстрируют возможность минимизации влияния импульсной помехи на характеристики работы пеленгатора, предотвращение потери контакта с объектом и обеспечение устойчивого акустического контакта с источником сигнала без снижения точности пеленгования и исключение работы оператора.
Использование: изобретение относится к гидроакустике, технической акустике и может быть использовано в гидроакустических системах для оценки углового положения шумящих целей, принимаемых в условиях действия импульсных помех. Сущность: на каждом цикле обработки формируют на антенной решетке два направленных в одном опорном направлении канала с разнесенными фазовыми центрами, оценивают разность фаз сигналов на их выходе и пересчитывают ее в угловое рассогласование между углом прихода сигнала и опорным направлением, получают текущие оценки пеленга, динамически накапливают их на большом интервале времени, корректируя на следующих циклах опорное направление, при этом дополнительно формируют оценку огибающей сигнала на выходе канала, сформированного в направлении на его источник, по которой определяют момент появления и окончания действия сильной импульсной помехи. При резком (более чем в два раза) увеличении значения огибающей на каком-либо цикле обработки этот и следующие за ним циклы исключаются из обработки до тех пор, пока не закончится действие импульсной помехи, при этом акустический контакт с источником сигнала поддерживается за счет экстраполяции опорного направления по выработанным до начала действия импульсной помехи оценкам пеленга и величины его изменения. Технический результат: повышение надежности сопровождения по пеленгу сигнала движущегося источника излучения в условиях действия импульсных помех, без снижения точности пеленгования и без участия оператора путем исключения временных фрагментов действия импульсных помех из обработки сигнала. 5 ил.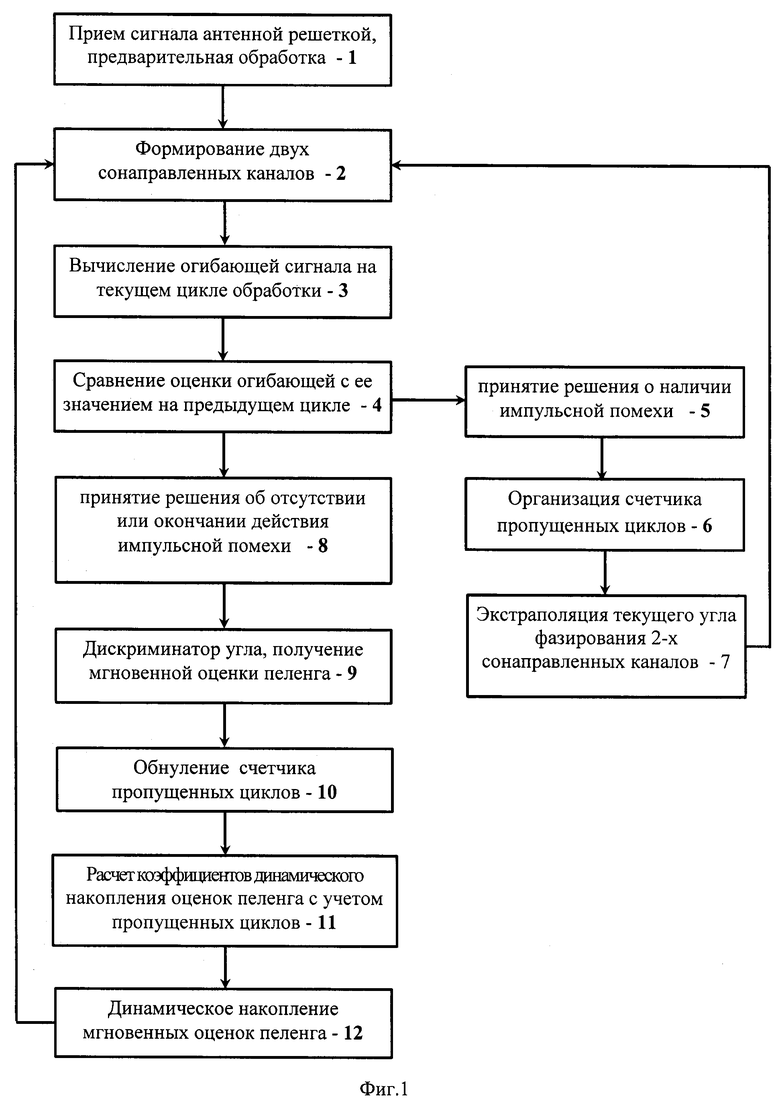
Способ пеленгования движущегося источника излучения, при котором на каждом цикле обработки формируют на антенной решетке два направленных в одном опорном направлении канала с разнесенными фазовыми центрами, оценивают разность фаз сигналов на их выходе и пересчитывают ее в угловое рассогласование между углом прихода сигнала и опорным направлением, получая оценки пеленга, осредненные на интервале времени Т0, равном нескольким циклам обработки, динамически накапливают их на интервале времени Тн>>Т0, формируя оценку пеленга и величины изменения пеленга, отличающийся тем, что на каждом цикле обработки формируют оценку огибающей сигнала на выходе сформированных каналов, для чего выходы сформированных каналов на каждом цикле обработки квадрируют, суммируют в частотной полосе обработки и накапливают на заданном интервале времени, сравнивают полученную оценку огибающей с ее оценкой на предыдущем цикле обработки и, если текущее значение оценки огибающей больше удвоенного предыдущего ее значения, принимают решение о наличии импульсной помехи, организуют счетчик циклов обработки в условиях действия импульсной помехи, и на циклах, отмеченных счетчиком, оценку разности фаз сигналов на выходе сформированных каналов не выполняют, осредненную на интервале времени Т0 оценку пеленга не вычисляют, оценку величины изменения пеленга не корректируют, а сохраняют ее и значение уровня огибающей сигнала предыдущего цикла на следующий за ним цикл как текущие значения, в качестве опорного направления при формировании двух пространственных каналов на каждом следующем цикле обработки используют результат экстраполяции оценки пеленга на время, равное длительности цикла обработки, с учетом полученной к текущему циклу оценки величины изменения пеленга, а если текущее значение оценки огибающей меньше удвоенного ее значения на предыдущем цикле, принимают решение об отсутствии импульсной помехи, вычисляют осредненную на интервале времени Т0 оценку пеленга без учета циклов обработки в условиях действия импульсной помехи, а определение оценки пеленга на текущем цикле производят при осуществлении динамического накопления оценок пеленга на интервале времени Тн без учета циклов обработки в условиях действия импульсной помехи, рассчитывая коэффициенты динамического накопления оценок пеленга и величины его изменения так, как если бы пропущенных циклов обработки не было.
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2699923C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2018 |
|
RU2711432C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| DE 102011117591 A1, 08.05.2013 | |||
| СПОСОБ ВЫРАБОТКИ ХЛЕБНОГО КВАСА | 2015 |
|
RU2589977C1 |

