19
(Л
а
00
со 4
со
00 4
Изобретение относится к электротехнике и может быть применено в неконтактных опорах маховичных электродвигателей на транспорте и в навига- ционных устройствах.
Цель изобретения - уменьшение массы и габаритов электромагнитного подвеса.
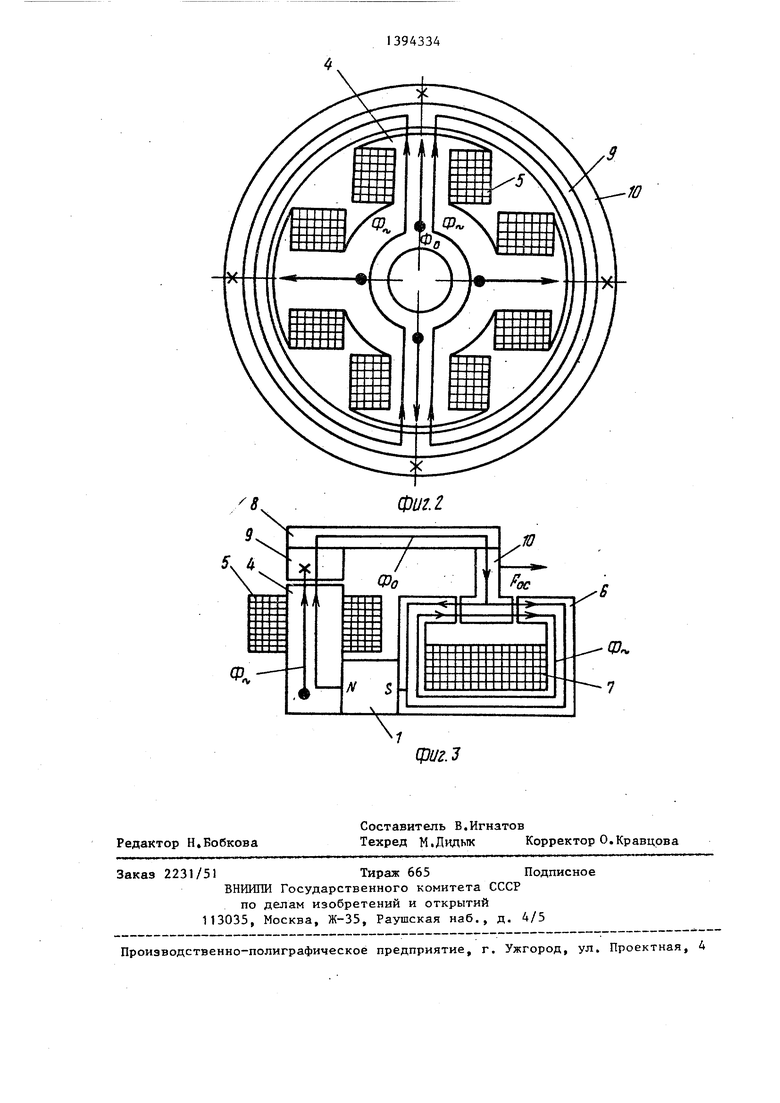
На ,1 изображен электромагнит- ный подвес (ЭМП), продольный разрез; на фиг,2 - распределение магнитных потоков постоянного магнита (f и электромагнита ( /) в электромагните радиальной стабилизации (ЭРС); на фиг.З - распределение магнитных потоков постоянного магнита (P ) и электромагнита () в электромагните осевой стабилизации (ЭОС).
В состав ЭМП входят две одинаковые электромагнитные опоры: левая и правая Сфиг.}, В состав каждой опоры входят ЭРС и ЭОС, постоянный магнит 1, и позиционные датчики: радиальный 2 и осевой 3
ЭРС содержит магнитопровод 4 и расположенные на нем обмотки 5, В состав ЭОС входят магнитопровод 6 и кольцевая обмотка 7, Электромагниты ЭРС и ЭОС выполнены в виде конструк- ции с общим ротором 8, имеющим форму полого цилиндра, йа торцах которого установлены кольцеобразные полюсшле наконечники 9 и 10, Наконечник 9 с зазором охватывает магнитопровод 4, а наконечник 10 введен с зазорами в разрез магнитопровода 6, ЭОС, Рабочие зазоры величиной (0,1-0,3) мм нахо-: дятся в ЭРС между поверхностями магнитопровода и полюсного наконечника 9, а в ЭОС - между торцовыми поверхностями полюсного наконечника 10 и кольцевыми выступами магнитопровода, Магнитопроводы ЭРС 4 и ЭОС 6 присты кованы к разноименным полюсам N и S постоянного магнита -1,
Кроме того, показаны маховик И, корпус 12, страховочные шариковые подшипники 13, установленные с зазо- рами 14,
ЭПМ работает следующим образом.
При отклонении величины рабочего зазора в ЭРС или ЭОС вследствие смещения ротора Я от некоторого нейтрального положения под воздействи- ем какой-либо силы,- например веса, на выходах соответствующих датчиков 2 и 3 возникает электрический сиг5
0
0
0 5 0 5
нал, который усиливается электронной схемой стабилизации и преобразуется ею в ток по обмоткам 5 и 7, вызывающий возникновение в рабочих зазорах сил стабилизации F, восстанавливающих нарушенное нейтральное положение ротора 8, Сила стабилизации обусловлена результирующим магнитным потоком, который по разному создается в ЭРС и ЭОС в результате алгебраического суммирования потоков постоянного магнита и электромагнита.
Момент инерции двигателя-маховика I mr, где m - масса, г - радиус : инерции, отсюда следует, что для - уменьшения массы необходимо увеличивать радиус вращающихся масс и уменьшать осевой размер двигателя-махови- к&. Именно этому требованию отвечает предлагаемое устройство, в котором для уменьшения массы и габаритов в осевом направлении предложена обращенная конструкция электромагнитов осевой стабилизации. Что касается ротора В, то он расположен на значительном радиусе инерции и по формуле Т mr эффективно способствует уменьшению массы маховика 11 при заданной величине момента инерции.
Формулаизобретения
Электромагнитный подвес двигателя- маховика, состоящий из двух одинаковых электромагнитных опор, каждая из которых включает электромагниты радиальной и осевой стабилизации с магнитопроводами, постоянный магнит и позиционные датчики для контроля зазоров мелоду неподвижными и вращающимися частями, отличающийся тем, что, с целью уменьшения массы и, габаритов подвеса, электромагниты радиальной и осевой стабили-т зации прилегают неподвижно к разноименным полюсам постоянного магнита, закрепленного на неподвижном валу из немагнитного материала, и охвачены снаружи полым ротором из магнитомяг- кого материала с полюсными наконечниками кольцевой формы, один из которых охватьшает с зазором электромагнит радиальной стабилизации, а другой расположен с зазором в разрезе магнитопровода электромагнита осевой стабилизации.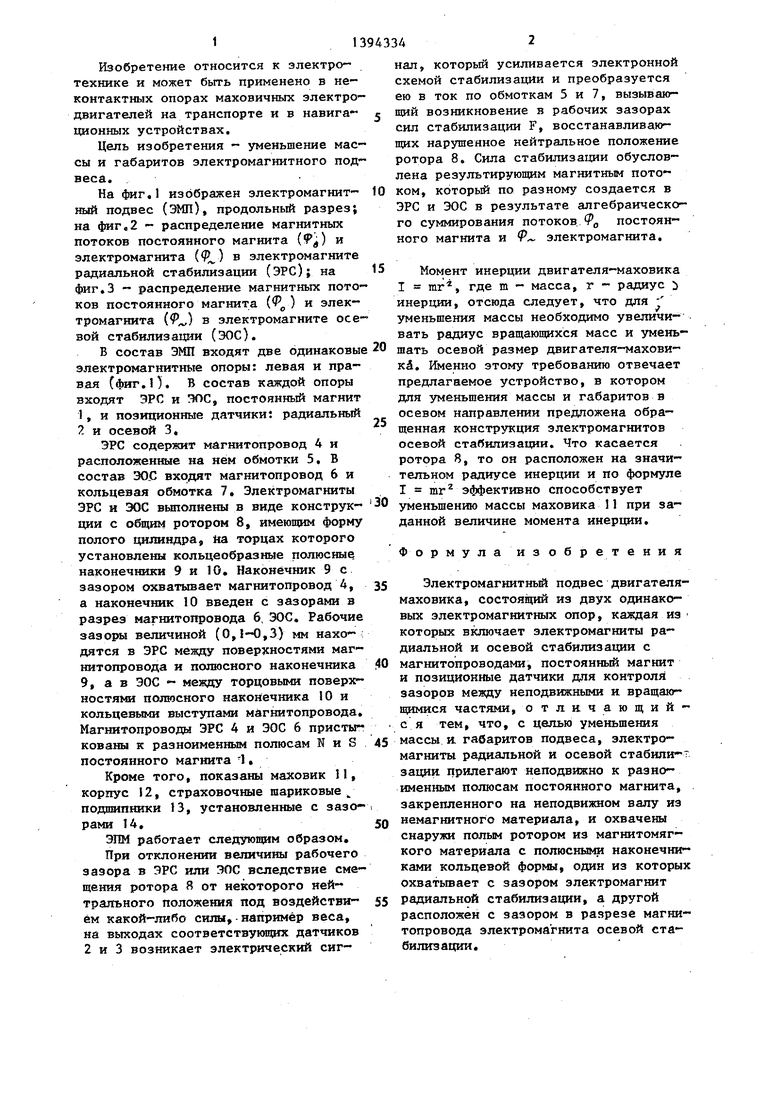
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЬЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ-МАХОВИК | 1986 |
|
SU1840218A1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| Электродвигатель с электромагнитным подвесом ротора | 1983 |
|
SU1163422A1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2316882C1 |
| Электромеханический исполнительный орган системы ориентации искусственного спутника Земли | 2016 |
|
RU2649560C2 |
| РОТОРНАЯ СИСТЕМА МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2475926C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| МАГНИТНАЯ ПОДВЕСКА (ВАРИАНТЫ) | 2001 |
|
RU2220490C2 |
| Электродвигатель | 1988 |
|
SU1658284A1 |
Изобретение относится к электро- технике. Цель изобре.тения - уменьшение габаритных размеров и массы подвеса . Электромагнитный подвес состоит из электромагнитов радиальной и осевой стабилизации, постоянных магнитов 1 и позиционных датчиков 2 я 3. Ротор 8 электромагнита осевой стабилизации выполнен в виде полого цилиндра, на торцах которого.установлены . полюсные наконечники 9, 10 кольцеобразной формы. Наконечник 9 охватывает с зазором магнитопровод электромагнита радиальной стабилизации, а наконечник 10 введен в разрез магнитопро- вода электромагнита осевой стабилизации. Это позволяет повысить жесткость подвеса. 3 ил.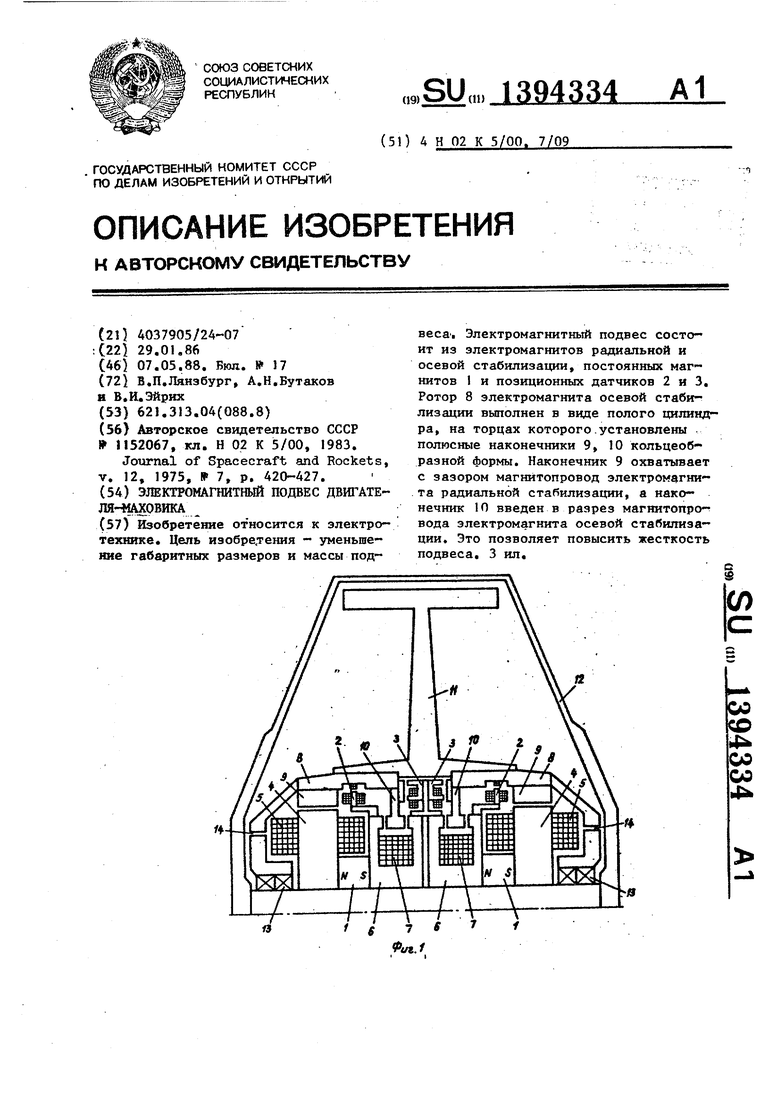
Фп.
7
(иг. З
| Электрическая машина с магнитным подвесом ротора | 1983 |
|
SU1152067A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Journal of Spacecraft and Rockets, V | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Приспособление для нагревания воздуха теплотой отработавшего воздуха | 1924 |
|
SU420A1 |
