Изобретение относится к области электротехники, в частности к электромеханическим исполнительным органам (ЭМИО), и может быть использовано в системе ориентации и стабилизации (СОС) космических аппаратов (КА), преимущественно искусственных спутников Земли (ИСЗ), в орбитальной системе координат.
Известны ЭМИО аналогичного назначения (SU №1394334, МПК H02K 5/00, 7/09 и SU №964883, МПК H02K 29/02), в которых в качестве опор, удерживающих ротор в требуемом положении, используются электромагниты (система активной стабилизации) либо комбинация электромагнитов с постоянными магнитами.
Указанным аналогам свойственны следующие недостатки:
1. В опорах на электромагнитах используются регулируемые силы магнитного тяжения, что требует дополнительного «служебного» энергопотребления. В таких опорах магнитный поток проходит из каждой из локальных магнитных систем (обычно 3-х÷4-х) в движущийся относительно них металлический магнитомягкий, а значит, и электропроводящий обод ротора маховика. При этом в частях обода ротора, находящихся напротив полюсов электромагнитов, в соответствии с законом электромагнитной индукции, будут наводиться ЭДС, а в частях обода ротора, находящихся в промежутках между полюсами электромагнитов, ЭДС наводиться не будут. Вследствие этого в электропроводящем ободе будут протекать токи, которые при взаимодействии с полями электромагнитов приведут к возникновению сил магнитного взаимодействия, направленных встречно скорости, т.е. к появлению тормозного момента. Это, в свою очередь, потребует дополнительной мощности, подводимой к электродвигателю для его компенсации, причем эта дополнительная мощность пропорциональна скорости движения подвижной части опоры и обода маховика относительно неподвижной части опоры.
2. Электромагнитные опоры отличаются высокой сложностью, а значит, и невысокой надежностью, которая в сочетании с необходимостью служебного энергопотребления существенно снижает эксплуатационно-технические характеристики ЭМИО в целом.
Наиболее близким к заявляемому техническому решению является устройство для стабилизации космического аппарата (SU №1839912, МПК B64G 1/00), принятое за прототип. Указанное устройство относится к электромеханическим исполнительным органам системы ориентации и стабилизации космических аппаратов, а именно искусственных спутников Земли, и содержит маховик, обращенный электродвигатель, электромагниты и магнитный стабилизатор аксиального и радиального положения маховика с датчиками перемещений, а также усилители-преобразователи. Маховик выполнен в виде цилиндра из магнитопроводящего материала, на внутренней стороне которого закреплен ротор двигателя, а на внешней выполнены кольцевые полюса электромагнитов. Электромагниты выполнены каждый с тремя стержнями, на среднем из которых закреплены сегментные полюса.
Недостатками прототипа являются: необходимость подвода дополнительной мощности к ЭМИО для компенсации тормозного момента, возникающего из-за протекания токов в магнитопроводящем металлическом маховике (ободе) ЭМИО, высокое энергопотребление для обеспечения требуемой для функционирования ЭМИО жесткости электромагнитных опор, высокая сложность электромагнитных опор, выражающаяся в применении следящей системы управления перемещениями маховика ЭМИО.
Задача, на решение которой направлено заявляемое техническое решение, - повышение эксплуатационно-технических характеристик ЭМИО при обеспечении жесткости опор, достаточной для ИСЗ на орбите Земли.
Поставленная задача решается тем, что известный электромеханический исполнительный орган (ЭМИО) системы ориентации искусственного спутника Земли, содержащий маховик, на внутренней цилиндрической поверхности которого закреплен ротор электрического двигателя обращенного типа, согласно изобретению снабжен двумя дополнительными постоянными магнитами с полюсными наконечниками и ярмами, расположенными с торцевых сторон маховика симметрично относительно центра масс ЭМИО, с образованием вспомогательных зазоров между коническими поверхностями ротора электрического двигателя - явнополюсного синхронного двигателя и полюсных наконечников дополнительных магнитов, причем дополнительные магниты и магнит ротора электрического двигателя выполнены из материала с высококоэрцитивными характеристиками и ориентированы одноименными полюсами к вспомогательному зазору, при этом постоянный магнит электрического двигателя отделен от своих полюсных наконечников когтевого типа немагнитным материалом, а маховик выполнен из неметаллического немагнитного материала, позволяющего получить высокое значение удельной энергии, и в котором отсутствует возможность образования и протекания электрических токов.
Дополнительные магниты и магнит ротора электрического двигателя выполнены из NDFEB.
Физическая осуществимость таких опор достигается элементной базой - постоянными высококоэрцитивными магнитами на основе NdFeB. Эти магниты способны создавать очень сильные поля в немагнитных зазорах, за счет чего и обеспечивается жесткость опор, достаточная для ИСЗ.
Техническим результатом, обеспечиваемым предлагаемой конструкцией электромеханического исполнительного органа системы ориентации ИСЗ, является обеспечение длительного функционирования электромеханического исполнительного органа в условиях космического пространства, обеспечение ориентации ИСЗ при наименьших затратах энергии.
На фиг. 1 изображен ЭМИО системы ориентации ИСЗ.
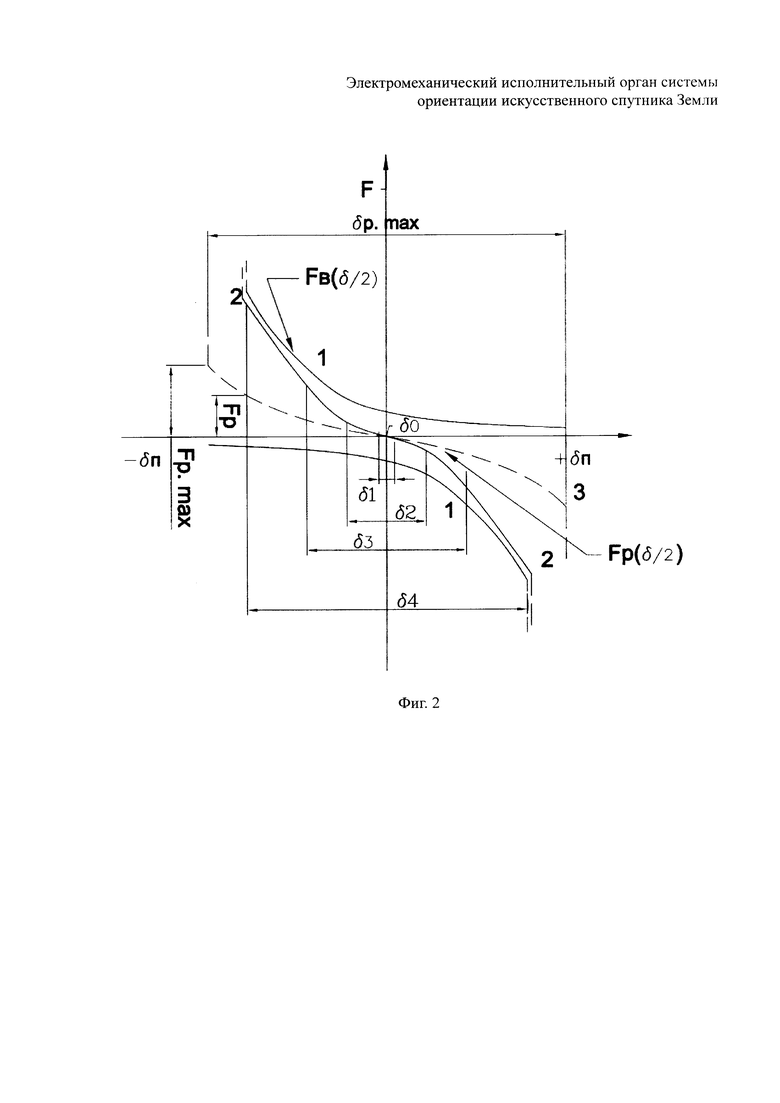
На фиг. 2 изображены эпюры сил магнитного тяжения в рабочем зазоре и сил магнитного отталкивания во вспомогательных зазорах.
Предлагаемый ЭМИО системы ориентации ИСЗ (фиг. 1) содержит маховик 1, на внутренней поверхности которого неподвижно закреплен ротор 2 обращенного электрического двигателя явнополюсного (когтевого) типа. Электрический двигатель содержит ротор 2, постоянный магнит 3, отделенный от «когтей» полюсов 4 немагнитным материалом 5, статор 6 с трехфазной обмоткой 7. Статор неподвижно закреплен на оси, состоящей из двух полуосей 8, выполненных из немагнитного материала и закрепленных в торцевых крышках 9, также выполненных из немагнитного материала. Статор 6 электрического двигателя отделен от ротора 2 немагнитным рабочим зазором 10, образованным внутренней цилиндрической поверхностью ротора 2 и обмоткой статора 6. Кроме того, ЭМИО содержит два постоянных магнита 11, жестко закрепленных на торцевых крышках 9, которые снабжены полюсными наконечниками 12 и ярмами 13, выполненными из магнитомягкого материала. Между коническими поверхностями ротора 2 и полюсных наконечников 12 образованы вспомогательные зазоры 14, имеющие форму тонкостенного усеченного конуса. Постоянные магниты 11 расположены симметрично относительно центра масс ЭМИО и ориентированы таким образом, чтобы магнит 3, входящий в состав электрического двигателя, и магниты 11 были обращены к вспомогательным зазорам 14 одноименными полюсами.
Маховик выполнен из неметаллического немагнитного материала, позволяющего получить высокое значение удельной энергии, в котором отсутствует возможность образования и протекания электрических токов и, соответственно, отсутствует возможность возникновения тормозного момента. В качестве такого материала могут быть использованы композитные материалы на базе углеволокна или углепластика.
Постоянный магнит 3 электрического двигателя и дополнительные постоянные магниты 11 выполнены из материала с высококоэрцитивными характеристиками, например из NdFeB.
Электромеханический исполнительный орган системы ориентации искусственного спутника Земли работает следующим образом.
Постоянный магнит 3 через чередующиеся полюсные наконечники-«когти» 4 ротора электрического двигателя 2 создает рабочий поток в статоре 6 электрического двигателя, на котором расположена 3-фазная обмотка 7. При этом рабочий поток из ротора в статор проходит через немагнитный рабочий зазор 10, имеющий форму тонкостенного цилиндра.
В магнитную цепь ЭМИО кроме постоянного магнита 3, создающего рабочий поток в немагнитном рабочем зазоре 10, входят два постоянных магнита 11 с полюсными наконечниками 12, создающие потоки во вспомогательных зазорах 14.
При подключении 3-фазной обмотки электрического двигателя 7 в статоре 6 создается вращающееся магнитное поле, которое, взаимодействуя с полюсными наконечниками-«когтями» 4 ротора 2 электрического двигателя, увлекает ротор, закрепленный на внутренней поверхности маховика 1, за собой.
В немагнитном рабочем зазоре 10 между чередующимися полюсными наконечниками-«когтями» 4 ротора 2 и статором 6 электрической машины возникают силы тяжения, которые могут привести к перекосу ротора 2 относительно статора 6 или прикосновению ротора 2 к статору 6. В двух вспомогательных зазорах 14 формируются силы отталкивания, компенсирующие силы тяжения. Силы отталкивания значительно превышают силу тяжения ввиду того, что магнитная цепь наконечников-«когтей» 4 ротора 2 не насыщена, и площадь рабочего зазора, через которую проходит рабочий магнитный поток, значительно меньше площади вспомогательных зазоров 14. В результате совместного действия сил отталкивания во вспомогательных зазорах и силы тяжения в рабочем зазоре маховик 1 ЭМИО удерживается в рабочем положении, при этом силы отталкивания во вспомогательных зазорах играют роль опор, которые совмещают функции осевых и радиальных «подшипников». Данные опоры, по сути, являются аналогами радиально-упорных подшипников.
Малая жесткость опор обеспечивает самоустановление физической (реальной) оси ротора и его центра масс (последние в силу конечной точности изготовления не совпадают с конструктивными), при этом колебания текущих зазоров (см. фиг. 2) значительно меньше этих зазоров. Это исключает механический контакт в опорах, а значит, и передачу высокочастотных колебаний на корпус ИСЗ, при этом силы и моменты передаются. На графике (фиг. 2), построенном на основании сведений из курса электротехники для механических сил магнитного поля [К.А. Круг. Основы электротехники. Москва-Ленинград: Объединенное Научно-техническое издательство. Главная редакция энергетической литературы, 1936, с. 212-216], изображены: кривая 1 - сила, действующая в каждом вспомогательном зазоре, кривая 2 - равнодействующая сил, действующих во вспомогательных зазорах, кривая 3 - сила, действующая в рабочем зазоре:
где δ1, δ2, δ3, δ4 - текущие значения рабочего или вспомогательного зазоров,
δ0 - номинальное (первоначальное) значение зазора,
δп - предельное значение зазора,
δв - вспомогательный зазор,
δр - рабочий зазор (зазор, через который проходит рабочий поток электрического двигателя),
δp.max - максимальное значение рабочего зазора.
В связи с тем, что ускорения, возникающие при штатной эксплуатации КА, много меньше g, то жесткости опор на магнитах NdFeB вполне достаточно для обеспечения условия: δв<δр (фиг. 2). Выполнение данного условия делает возможным длительное функционирование ЭМИО в условиях космического пространства.
ЭМИО предлагаемой конструкции имеет длительный срок функционирования в условиях космического пространства, обеспечивает ориентацию ИСЗ при наименьших затратах энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЬЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ-МАХОВИК | 1986 |
|
SU1840218A1 |
| ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2173499C2 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2356155C1 |
| Электромагнитный подвес двигателя-маховика | 1986 |
|
SU1394334A1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1978 |
|
SU1839912A1 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
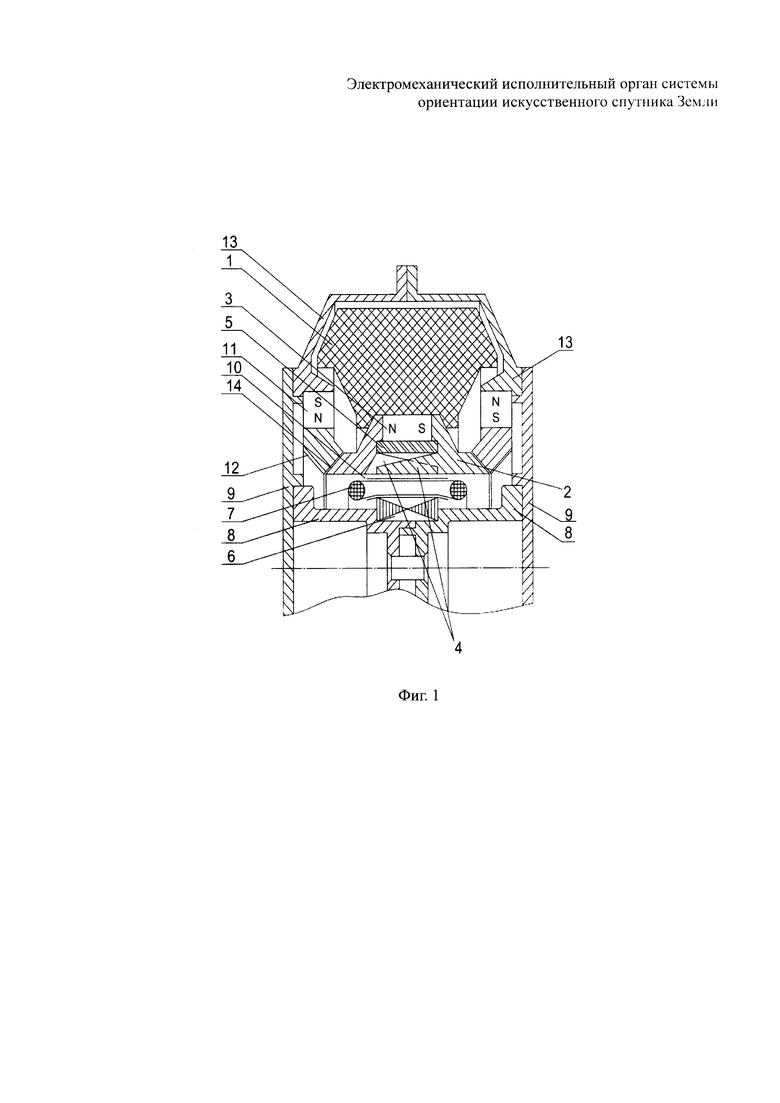
Изобретение относится к электротехническому оборудованию систем ориентации и стабилизации космических аппаратов (ИСЗ). Электромеханический исполнительный орган (ЭМИО) содержит маховик (1) с ротором (2) обращенного электродвигателя явнополюсного («когтевого») типа, имеющего статор (6) с трехфазной обмоткой (7). Постоянный магнит (3) отделен от «когтей» полюсов (4) немагнитным материалом (5). Статор закреплен на оси в виде двух полуосей (8), закрепленных в торцевых крышках (9). Ось и крышки выполнены из немагнитного материала. Статор (6) отделен от ротора (2) немагнитным рабочим зазором (10). ЭМИО также содержит два постоянных магнита (11) с полюсными наконечниками (12) и ярмами (13) из магнитомягкого материала, закрепленных на крышках (9). Между ротором (2) и полюсными наконечниками (12) образованы вспомогательные зазоры (14). Магниты (3) и (11), выполненные из материала с высококоэрцитивными характеристиками (NdFeB), обращены к зазорам (14) одноименными полюсами. Маховик (1) выполнен из композитного материала, исключающего возможность протекания в нем токов (вызывающих тормозной момент). Техническим результатом являются обеспечение длительного функционирования в космосе ИСЗ, оснащенных предлагаемыми ЭМИО, и проведение ориентации ИСЗ с наименьшими затратами энергии. 1 з.п. ф-лы, 2 ил.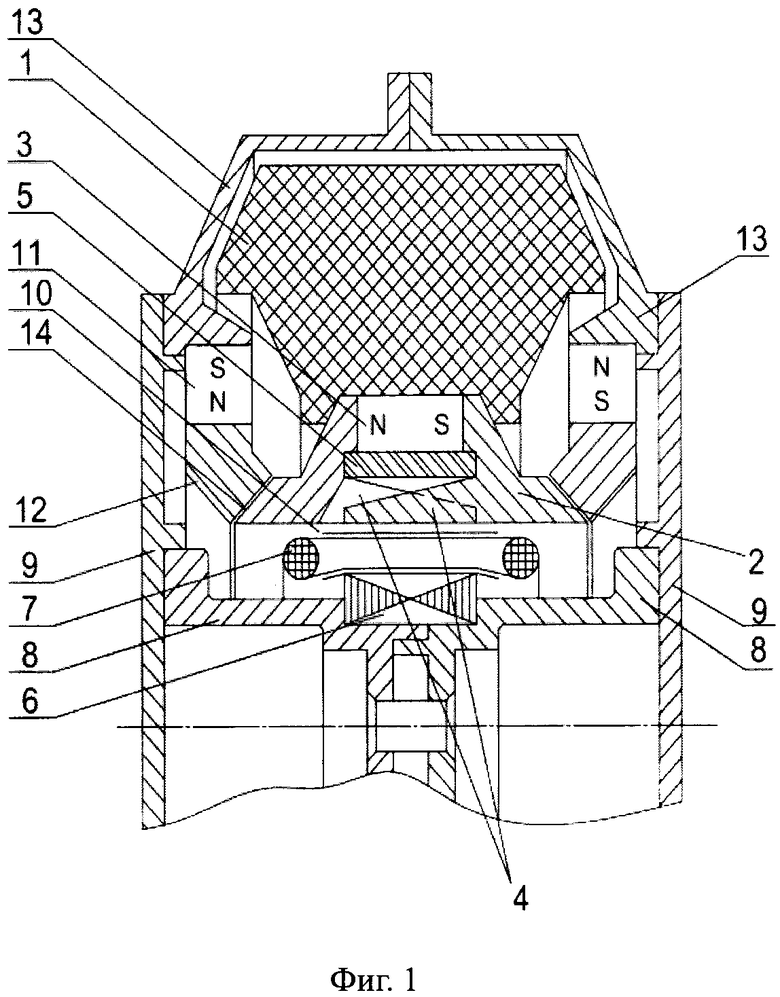
1. Электромеханический исполнительный орган (ЭМИО) системы ориентации искусственного спутника Земли, содержащий маховик, на внутренней цилиндрической поверхности которого закреплен ротор электрического двигателя обращенного типа, отличающийся тем, что снабжен двумя дополнительными постоянными магнитами с полюсными наконечниками и ярмами, расположенными с торцевых сторон маховика симметрично относительно центра масс ЭМИО, с образованием вспомогательных зазоров между коническими поверхностями ротора электрического двигателя - явнополюсного синхронного двигателя и полюсных наконечников указанных дополнительных магнитов, причем дополнительные магниты и магнит ротора электрического двигателя выполнены из материала с высококоэрцитивными характеристиками и ориентированы одноименными полюсами к вспомогательному зазору, при этом постоянный магнит указанного электрического двигателя отделен от своих полюсных наконечников ногтевого типа немагнитным материалом, а маховик выполнен из неметаллического немагнитного материала с высоким значением удельной энергии, в котором отсутствует возможность образования и протекания электрических токов.
2. Электромеханический исполнительный орган системы ориентации искусственного спутника Земли по п. 1, отличающийся тем, что дополнительные магниты и магнит ротора электрического двигателя выполнены из NdFeB.
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1978 |
|
SU1839912A1 |
| Электромагнитный подвес двигателя-маховика | 1986 |
|
SU1394334A1 |
| 0 |
|
SU155293A1 | |
| US 20030189338 A1, 09.10.2003 | |||
| US 20070103009 A1, 10.05.2007. | |||

