Предлагаемое изобретение относится к области радиотехники и может использоваться в широкополосных системах связи с шумоподобными сигналами.
Известны устройства синхронизации шумоподобного сигнала, описанные в книгах: "Шумоподобные сигналы в системах передачи информации" под ред. В.В.Пестрякова, М.: Сов. радио, 1973 г.,
Г.И.Тузов "Статистическая теория приема сложных сигналов", М.: Сов. радио, 1977 г., а также в авторских свидетельствах: №702336 "Цифровое устройство слежения за задержкой", №711696 "Цифровое устройство слежения за задержкой".
Основным недостатком выше приведенных устройств является то, что при больших начальных частотных растройках между тактовыми импульсами опорного и принимаемого псевдослучайных сигналов повышение помехозащищенности связано со значительным увеличением времени вхождения в синхронизм.
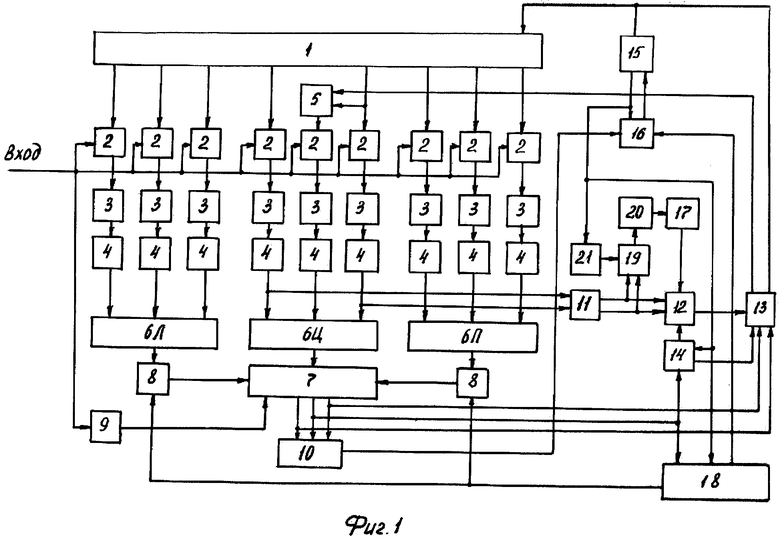
Блок-схема прототипа изображена на фиг.1, для которой введены следующие обозначения:
1 - регистр сдвига;
2 - перемножитель;
3 - интегратор;
4 - амплитудный детектор;
5 - сдвигающий триггер;
6Л, 6П, 6Ц - схемы выбора максимальных сигналов;
7, 11 - схемы сравнения;
8 - ключи;
9 - формирователь порога;
10 - сумматор;
12 - управляемый делитель точной дискретной системы фазовой автоподстройки (ФАП);
13 - управляемый делитель грубой дискретной системы ФАП;
14 - устройство управления работой точной и грубой систем ФАП;
15 - генератор псевдослучайной последовательности (ГПСП);
16 - схема управления перестройкой ГПСП;
17 - управляемый генератор тактовых импульсов;
18 - схема принятия решений;
19 - реверсивный счетчик;
20 - цифроаналоговый преобразователь (ЦАП);
21 - делитель строб-импульсов.
Устройство прототип имеет следующие функциональные связи:
Один вход блока 15 соединен с выходом блока 16, другой вход - с блоком 13 и 1, первый выход - с блоком 1, выходы которого подключены к видеочастотным входам перемножителей 2. Один выход блока 1 через блок 5 соединен с видеочастотным входом блока 2, центрального канала, центральной группы корреляторов. Выходы блока 2 через последовательно соединенные блоки 3 и 4 подключены ко входам блоков 6Л, 6Ц, 6П. Выходы блоков 6Л и 6П через ключи 8, другие входы которых подключены к выходу блока 18, соединены со входами схемы сравнения 7, другой вход которой через блок 9 подключен к радиочастотным входам перемножителей 2 и входу устройства синхронизации шумоподобного сигнала. Выходы блока 7 подключены к входам блоков 10, 13, 14 и 18. Выход блока 10 соединен с входом блока 16, второй вход которого подключен к выходу блока 18, а третий выход - с блоками 14, 15, 18 и через блок 21 - со входом блока 19, два других входа которого подключены к выходам блока 11 и входам блока 12. Входы блока 11 соединяются с выходами детекторов 4 крайних корреляционных каналов центральной группы корреляторов. Третий вход блока 12 соединен с выходом блока 14 и входом блока 19, а четвертый через последовательно соединенные блоки 17 и 20 подключен к выходу блока 19. Один из входов блока 13 соединен с выходом блока 14, а выход - с блоком 5. Выход блока 6Ц соединен с одним из входов блока 7.
Учитывая, что ряд блоков устройства-прототипа выполняют индентичные функции, а также с целью получения большей наглядности о работе устройства в целом, авторы укрупнили схему прототипа, объединив ряд блоков воедино с учетом выполняемых ими функций. При этом блоки 1, 5, 15 и 16, выполняющие функцию генерирования и фазового сдвига опорных ПСП, по командам от схемы принятия решений, объединены в блок - управляемый генератор псевдослучайной последовательности (ПСП), блоки 2, 3 и 4, производящие корреляционную обработку сигнала в блок-коррелятор, блоки 6Д, 6Ц, 6П, 7, 8, 9, 10, 18, существующие обнаружение и формирование команд управление - в блок принятия решений. Два выхода схемы сравнения 11 заменены одним, т.к. команда о направлении подстройки может передаваться по одному проводу.
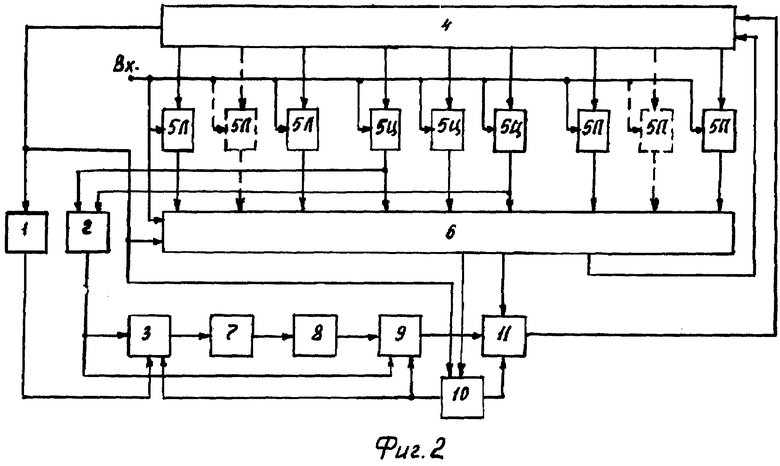
Укрупненная блок-схема устройства-прототипа изображена на фиг.2, для которой введены следующие обозначения:
1 - делитель строб-импульсов;
2 - схема сравнения;
3 - реверсивный счетчик;
4 - управляемый генератор ПСП;
5Л, 5П, 5Ц - корреляторы левой, правой и центральной групп;
6 - блок принятия решений;
7 - цифроаналоговый преобразователь ЦАП;
8 - управляемый генератор тактовых импульсов;
9 - управляемый делитель точной дискретной системы ФАП;
10 - устройство управления работой точной и грубой систем ФАП;
11 - управляемый делитель грубой дискретной системы ФАП.
Прототип имеет следующие функциональные связи:
Выходы блока 4 соединены со входами блоков 5Л, 5Ц, 5П, вторые входы которых объединены вместе, а также соединены с первым входом блока 6, они являются входом устройства. Выходы блоков 5Л, 5Ц, 5П соединены с соответствующими входами блока 6, а выход крайних корреляторов блоков 5Ц соединяются также с первым и вторым входом блока 2, выход которого соединен со входами блоков 3 и 9. Выходы блока 3 соединяются с соответствующими входами блока 7, выход которого подключен через блок 8 ко второму входу блока 9. Выход блока 9 подключен к первому входу блока 11, выход которого соединяется с первым входом блока 4. Выход строб-импульса блока 4 соединяется со входами блоков 1, 6 и первым входом блока 10. Три выхода блока 6 соединяются соответственно со вторыми входами блоков 4, 10, 11. Первый выход блока 10 соединяется с третьими входами блоков 3, 9, а второй - с третьим входом блока 11.
Устройство-прототип работает следующим образом.
Управляемый генератор 4 формирует псевдослучайные последовательности, поступающие на входы корреляторов 5Л, 5Ц, 5П, в качестве опорных сигналов. В правой 5П и левой 5Л группах корреляторах сдвиг опорных ПСП на входах рядом стоящих корреляторов составляет τ (где τ - длительность одного элемента ПСП), а в центральной 5Ц он составляет τ/2. Сдвиг ПСП между рядом стоящими корреляторами соседних групп равен τ. На объединенные входы корреляторов поступает входной сигнал и происходит вычисление функции взаимной корреляции входного сигнала с опорными ПСП. Результаты вычисления, полученные от каждого коррелятора 5Л, 5Ц, 5П, поступают в блок 6 принятия решений, последний сравнивает их с установленным порогом. Если сигнал не обнаружен ни в одном корреляторе 5Л, 5Ц, 5П, от схемы принятия решений 6 подается команда, по которой осуществляется сдвиг опорных ПСП на (n-1)·τ (где n - общее количество корреляторов) и производится повторный поиск сигнала. При обнаружении сигнала в левой 5Л или правой 5П группах корреляторов блок 6 подает команду на делитель 11 грубой дискретной системы ФАП, который производит подстройку фазы опорных ПСП, сдвигая их на τ в момент действия строб-импульса. Сдвиги опорных ПСП будут происходить до момента обнаружения сигнала в центральной группе корреляторов 5Ц. Когда сигнал в центральной группе корреляторов обнаружен, блок 6 формирует команду, по которой устройство управления 10 запрещает грубую дискретную подстройку и разрешает точную. Точная дискретная подстройка фазы осуществляется по дискриминационной характеристике релейного вида, полученной в результате сравнения блоком 2 вычисленных значений функций взаимных корреляций в левом и правом корреляторах центральной группы 5Ц. Делитель 9 точной дискретной системы ФАП через время, равное периоду ПСП, сдвигает фазу опорных сигналов на τ/m (где m>1) в сторону уменьшения временного рассогласования ПСП центрального коррелятора центральной группы с принимаемым сигналом. Шаг точной подстройки выбирается с учетом неравенства
 , где
, где
Т - период ПСП, мс;
ΔF - максимально возможная растройка по частоте между тактовыми импульсами опорной и принимаемой ПСП Гц.
Для получения устойчивой работы системы синхронизации в условиях действия естественных и преднамеренных помех, а также кратковременного пропадания сигнала необходимо повысить точность синхронизации, делая кольцо ФАП предельно узкополосным (Обычно предельно допустимое сужение полосы кольца автоподстройки определяется скоростью изменения доплеровского сдвига частоты принимаемого сигнала).
В режиме синхронизма фаза и частота опорного сигнала совпадают с фазой и частотой принимаемого, поэтому поставленная имитационная помеха с растройкой, по частоте тактовых импульсов по отношению к полезному сигналу, не захватится узкополосным кольцом ФАП. В момент разрешения работы точной дискретной системы ФАП первоначальная ошибка по частоте и фазе может быть значительной, поэтому с точки зрения защиты от имитационной помехи необходимо как можно быстрее засинхронизироваться, скомпенсировав начальные растройки. Реверсивный счетчик 3 позволяет уменьшить начальную частотную растройку между тактовыми импульсами опорной и принимаемой ПСП, что дает возможность в соответствие с формулой (1) уменьшить шаг делителя 9, повысить точность и помехозащищенность синхронизации.
К основному недостатку устройства-прототипа следует отнести, что при больших начальных частотных растройках увеличение помехозащищенности устройства связано со значительным ухудшением быстродействия, при входе системы точной ФАП в синхронизм. Действительно, увеличение количества разрядов реверсивного счетчика на m и уменьшения шага делителя точной дискретной системы ФАП в 2m раза приводит к увеличению времени вхождения в синхронизм не менее чем в 2m раза, что, в свою очередь, облегчает возможность постановки имитационной помехи до момента входа. устройства в синхронизм.
Целью предлагаемого изобретения является повышение помехоустойчивости устройства синхронизации шумоподобного сигнала при малом времени вхождения в синхронизм и большой растройке по частоте тактовых импульсов между принимаемым и опорным ПСП сигналами.
Поставленная цель достигается введением в устройство-прототип вычитающего устройства, устройства управления режимом работы точной ФАП, пропорционального звена с переключаемым коэффициентом передачи, интегрирующего устройства с переключаемой постоянной времени интегрирования и их функциональных связей.
Блок-схема предлагаемого устройства изображена на фиг.3, где введены следующие обозначения:
1 - вычитающее устройство;
2 - пропорциональное звено с переключаемым коэффициентом передачи;
3 - устройство управления режимом работы точной ФАП;
4 - управляемый генератор ПСП;
5Л, 5Ц, 5П - корреляторы левой, центральной и правой группы;
6 - блок принятия решений;
7 - интегрирующее устройство с переключаемой постоянной времени интегрирования;
8 - управляемый генератор тактовых импульсов;
9 - сумматор;
10 - устройство управления работой точной и грубой систем ФАП;
11 - управляемый делитель грубой дискретной системы ФАП.
Предлагаемое устройство имеет следующие функциональные связи.
Выходы блока 4 соединяются со входами блоков 5Л, 5Ц, 5П, вторые входы которых объединены вместе, а также соединены с первым входом блока 6, они являются входом устройства. Выходы блоков 5Л, 5Ц, 5П соединены с соответствующими входами блока 6, а выходы левого и правого блоков 5Ц соединяются также с первым и вторым входами блока 1. Выход синхроимпульса блока 4 соединяется со входами блоков 2, 3, 6, 7, 10. Выход блока 1 соединяется со входами блоков 2, 7. Один из выходов блока 3 соединен со входом блока 2, а другие выходы блока 3 соединяются с соответствующими входами блока 7. Выход блока 2 соединяется с одним из входов блок 3 и с первым входом блока 9. Выход блока 7 соединяется со вторым входом блока 9. Выход блока 9 через блок 8 соединяется с первым входом блока 11. Выход блока 11 соединен со входом блока 4. Первый выход блока 6 соединен со входом блока 10, второй - со входом блока 11, третий - со входом блока 4. Первый выход блока 10 соединен с одним из входов блока 3, второй - с соответствующим входом блока 11.
Предлагаемое устройство работает следующим образом.
Управляемый генератор 4 формирует псевдослучайные последовательности, поступающие на входы корреляторов 5Л, 5Ц, 5П, в качестве опорных сигналов. На объединенные входы корреляторов 5Л, 5Ц, 5П подан входной сигнал и происходит вычисление функции взаимной корреляции входного сигнала с опорными ПСП. Результаты вычисления, полученные от каждого коррелятора в блоке 6 принятия решений, сравниваются с установленным порогом. Если сигнал не обнаружен ни в одном корреляторе 5Л, 5Ц, 5П, то от схемы принятия решений поступает команда, по которой опорные ПСП сдвигаются на (n-1)·τ, где n - общее количество корреляторов, τ - длительность одного элемента ПСП, и производится повторный поиск. При обнаружении сигнала в левой 5Л или правой 5П группах корреляторов блок 6 подает команду на делитель 11 грубой дискретной системы ФАП, который производит подстройку фазы опорных ПСП, сдвигая их на τ в момент действия строб-импульса. Сдвиги опорных ПСП будут происходить до момента обнаружения сигнала в центральной группе корреляторов. Когда сигнал в центральной группе корреляторов обнаружен, блок 6 формирует команду, по которой устройство управления 10 запрещает грубую дискретную подстройку и разрешает точную.
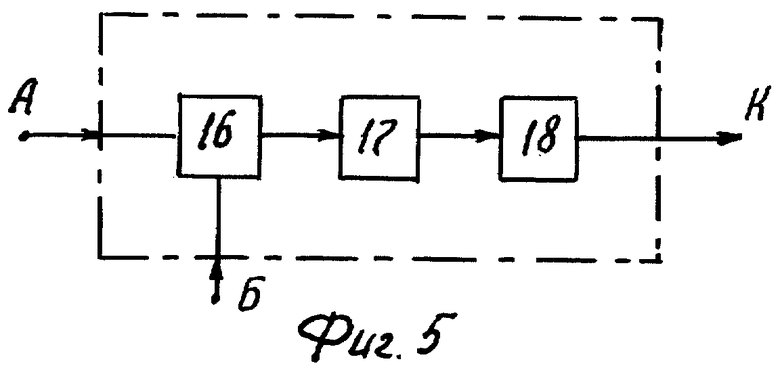
Точная автоподстройка производится по кусочно-линейной фазовой дискриминационной характеристике. Характеристика формируется на выходе вычитающего устройства (1) при вычислении разности значений функций взаимных корреляций в левом и правом корреляторах центральной группы 5Ц. Выходное напряжение вычитающего устройства поступает на вход пропорционального звена (2) с переключаемым коэффициентом передачи и на вход интегрирующего устройства (7) с переключаемой постоянной времени интегрирования. В общем случае блок 2, как показано на фиг.5, может состоять из последовательно соединенных дискретезатора (16), экстрополятора нулевого порядка (17) и буферного устройства (13) с переключаемым коэффициентом передачи. Для удобства сравнения заявляемого устройства с устройством-прототипом, при рассмотрении работы интегрирующего блока 7 с переключаемым временем интегрирования, будем считать, что он выполнен на дискретных элементах и имеет блок-схему, показанную на фиг.4, где введены следующие обозначения:
121..., 12i,..., 12n - коммутатор тактовых импульсов;
13 - устройство сравнения;
141,...14i,...14n - реверсивный счетчик;
15 - цифроаналоговый преобразователь ЦАП.
При разрешении работы точной автоподстройки устройство 3, управляющее ее режимом работы, устанавливает высокий коэффициент передачи блока 2, позволяющий за малое время перейти в устойчивую равновесия на фазовой траектории, а также коммутатором тактовых импульсов 12 соединяет выход строб-импульсов блока 4 со входом реверсивного счетчика 14, подключенного к старшим разрядам ЦАП, в это время остальные реверсивные счетчики не работают и находятся в положении, предварительно установленном блоком 3. Количество разрядов в реверсивном счетчике 14n необходимо брать больше некоторого числа ln, определяемого максимально возможной начальной частотной растройкой между тактовыми импульсами опорной и принимаемой ПСП, т.к. в противном случае будет проигрыш во времени из-за колебательности переходного процесса. По мере компенсации фазовой ошибки (вызванной начальной частотной растройкой) реверсивными счетчиками абсолютная величина напряжения на выходе блока 2 будет уменьшаться. Блок 15, управляющий режимом работы точной ФАП, при уменьшении напряжения на выходе блока 14 до значений близких к

(где U0 - напряжение на выходе блока соответствующее максимальной начальной частотной растройки, а ln, ln-1,..., l2 - количество разрядов в n-ом, (n-1)-ом,..., 2-ом реверсивных счетчиках) переключает коммутатором 12 выходные строб-импульсы блока 4 со входов реверсивных счетчиков старших разрядов, где можно считать переходной процесс закончился, на входы реверсивных счетчиков более младших разрядов, а реверсивные счетчики старших разрядов между собой соединяются последовательно через блоки 12. Когда величина напряжения на выходе блока 14 приблизится к значению  блок 3 установит низкий коэффициент передачи пропорционального звена, обеспечивающий низкую чувствительность к помехам.
блок 3 установит низкий коэффициент передачи пропорционального звена, обеспечивающий низкую чувствительность к помехам.
В предлагаемом устройстве синхронизации приемника шумоподобного сигнала, начиная с момента разрешения работы точной автоподстройки, по мере уменьшения величины базового рассогласования, производится сужение полосы кольца ФАП (за счет дискретного наращивания постоянной времени интегрирования реверсивного счетчика), увеличивающее помехозащищенность устройства, при этом путь движения в устойчивую точку равновесия на фазовой траектории значительно сокращается. Пропорциональное звено совместно с вычитающим устройством линейно преобразуют значения вычисленных функции корреляции в напряжении базового рассогласования и, на первом этапе работы системы точной ФАП, ускоряют переходные процессы, ликвидируя их колебательность, а на втором этапе в режиме синхронизма обеспечивают максимально возможную помехозащищенность при заданном запасе устойчивости.
Время переходного процесса tп в устройстве-прототипе при максимально возможной частотной растройке:
 где
где
tΔF - минимальное время, требуемое реверсивному счетчику для компенсации начальной частотной растройки;
L - количество разрядов в реверсивном счетчике;
Т - период следования импульсов подстройки.
В заявляемом устройстве для такой же начальной частотной растройки:
 где
где
tп - время переходного процесса в заявляемом устройстве;
ln, ln-1,..., l1 - количество разрядов в n-ом, (n-1)-ом,..., 1-ом реверсивных счетчиков;
Т - период следования импульсов подстройки.
На основании выражений (1) и (3) можно заключить, что при одинаковом времени вхождения в синхронизм заявляемое устройство позволяет получить более высокую помехозащищенность (т.к. при t'п≤tп можно получить ln+ln-1+...+l1≫L).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840167A1 |
| УСТРОЙСТВО ПОИСКА И ОБНАРУЖЕНИЯ ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840447A1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ШУМОПОДОБНОГО СИГНАЛА | 1975 |
|
SU1840645A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1979 |
|
SU1840118A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА В СИНХРОНИЗМ СИСТЕМЫ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1980 |
|
SU1840128A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1980 |
|
SU1840270A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840083A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1983 |
|
SU1840127A1 |
| УСТРОЙСТВО ПОИСКА СИСТЕМЫ СВЯЗИ С ШИРОКОПОЛОСНЫМИ СИГНАЛАМИ | 1980 |
|
SU1840267A1 |

Изобретение относится к области радиотехники и может использоваться в широкополосных системах связи с шумоподобными сигналами. Устройство синхронизации приемника шумоподобных сигналов содержит управляемый генератор псевдослучайных последовательностей, входы которого соединены с выходом блока принятия решений и с управляемым генератором тактовых импульсов. В устройство введены последовательно соединенные вычитающий блок, пропорциональное звено, сумматор и интегратор с изменяемой постоянной времени. Техническим результатом является повышение помехоустойчивости при малом времени вхождения в синхронизм и большой расстройке по частоте тактовых импульсов. 5 ил.
Устройство синхронизации приемника шумоподобных сигналов, содержащее управляемый генератор псевдослучайных последовательностей (ПСП), входы которого соединены с выходом блока принятия решений и через делитель грубой и точной фазовой автоподстройки (ФАП) с управляемым генератором тактовых импульсов, а выходы через соответствующие корреляторы подключены к входам блока принятия решений, отличающееся тем, что, с целью повышения помехоустойчивости при малом времени вхождения в синхронизм и большой расстройке по частоте тактовых импульсов, введены последовательно соединенные вычитающий блок, пропорциональное звено с изменяемым коэффициентом передачи, сумматор и интегратор с изменяемой постоянной времени, первый вход которого соединен с выходом вычитающего блока и входом пропорционального звена с переменным изменяемым коэффициентом передачи, выход которого соединен с первым входом сумматора, второй вход которого подключен к выходу интегратора с изменяемой постоянной времени, а выход - к входу управляемого генератора тактовых импульсов, соответствующие входы интегрирующего звена с изменяемой постоянной времени и пропорционального звена с изменяемым коэффициентом передачи соединены с выходом блока управления работой точной и грубой систем ФАП.
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ШУМОПОДОБНОГО СИГНАЛА | 1975 |
|
SU1840645A1 |

