Предлагаемое изобретение относится к области измерения перемещений и используется для контроля стыковки и расстыковки космических кораблей.
Известны электроконтактные датчики перемещения, содержащие корпус, шток, контактные пружины, пружину возврата, кулачки с контактной ламелью. Примеры таких устройств для измерения перемещения (датчиков) приводятся в литературе (например, Н.Н.Марков, В.М.Машинистов, Н.И.Этингоф. Электроконтактные датчики для линейных измерений. §1, стр.8).
Но в известных устройствах для измерения перемещения замыкание и размыкание происходит на одном размере от начала нажатия на шток при прямом и обратном ходе штока или с небольшим не регламентированным запаздыванием, то есть дифференциальным ходом, который не поддается настройке, а следовательно, такие устройства для измерения перемещений не могут быть использованы для получения непрерывного сигнала о факте стыковки космических кораблей при их относительно небольших расхождениях после стыковки вследствие их возможных деформаций и зазоров.
Целью предлагаемого изобретения является устранение указанных недостатков, т.е. создание устройства для измерения перемещений с повышенной надежностью за счет получения непрерывного сигнала о факте стыковки космических кораблей в условиях малых относительных расхождений соприкасательных объектов после их стыковки вследствие их возможных деформаций и зазоров.
Поставленная цель достигается тем, что в устройство для измерения перемещений состоящего из корпуса, подвижного штока, пружины возврата, контактных пружин, закрепленных на корпусе и кулачков с контактной ламелью введены дополнительно, поворотно закрепленный на корпусе рычаг с неподвижно закрепленным на нем роликом и рамка, неподвижно закрепленная на штоке и пружина растяжения, которая подпружинивает ролик относительно корпуса.
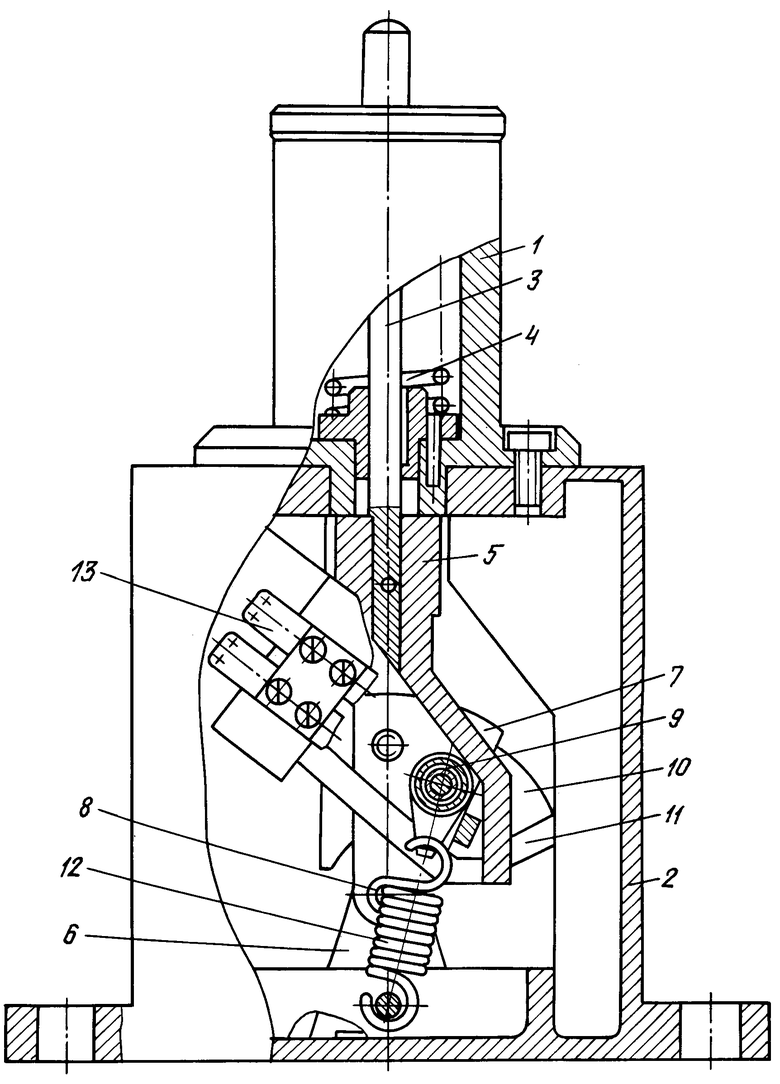
Изложенная сущность изобретения поясняется чертежом, на котором изображена конструкция устройства для измерения перемещений по предлагаемому изобретению.
Устройство для измерения перемещений состоит из корпуса 1 неподвижно соединенного с корпусом 2. В корпусе 1 установлен шток 3, который может перемещаться вдоль оси и возвращаться в исходное положение с помощью пружины 4. На штоке закреплена неподвижно рамка 5. В корпусе 2 неподвижно установлена стойка 6. На стойке 6 закреплен рычаг 7, который может поворачиваться вокруг оси 8. На рычаге 7 неподвижно закреплен ролик 9 и кулачок 10 с контактной ламелью 11, причем ролик 9 подпружинен относительно корпуса 2 пружиной растяжения 12. В корпусе 2 неподвижно установлены контактные пружины 13.
Работает устройство для измерения перемещений следующим образом.
В исходном положении рычаг 7 отклонен пружиной растяжения 12 на некоторый угол, в правое положение, при этом ролик 9 упирается в верхнюю плоскость рамки 5. При перемещении штока 3 вниз рамка 5 контактируя с роликом 9, заставляет рычаг 7 поворачиваться вокруг оси 8 растягивая пружину 12 и перейдя через нейтральное положение под действием силы пружины 12 рычаг перескакивает в левое положение на некоторый угол, ограниченный нижней плоскостью рамки, причем при переходе через нейтральное положение закрепленный на рычаге кулачок с контактной ламелью замыкает контактные пружины 13. При дальнейшем движении штока вниз до упора контактные пружины остаются замкнутыми. При перемещении штока из крайнего нижнего положения в исходное под действием пружины 4, рамка 5, контактируя нижней плоскостью с роликом 9 заставляет рычаг 7 поворачиваться вокруг оси 8 до нейтрального положения, растягивая пружину 12. При дальнейшем перемещении штока вверх рычаг 7 под действием силы пружины 12 перескакивает в правое положение и упирается роликом в верхнюю плоскость рамки 5. Так как верхняя и нижняя плоскость рамки имеют различные углы наклона, то при обратном движении штока 3 рычаг 7 перескакивает в правое положение через нейтральную точку на размере, меньшем размера перескока рычага 7, в левое положение (размер измеряется от начала движения штока из исходного положения до момента перескока рычага в то или другое положение), а так как при перескоке рычага 7 в левое положение происходит замыкание контактных пружин 13 контактной ламелью 11, а при перескоке в правое положение происходит размыкание контактных пружин 13, то получается дифференциальный ход, который можно регулировать наклоном плоскостей рамки и который стабилен во время всего ресурса работы данного устройства для измерения перемещений.
Результаты испытаний подтвердили надежность устройства для измерения перемещения и целесообразность использования данного устройства вместо обычных двух датчиков для линейных измерений. Это позволило упростить электрическую схему блока управления стыковкой и снизить вес агрегата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Игрушечная космическая станция | 1983 |
|
SU1106527A2 |
| Игрушечная космическая станция | 1979 |
|
SU820871A1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| УСТРОЙСТВО СТЯГИВАНИЯ СТЫКОВОЧНЫХ АГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2706640C1 |
| УСТРОЙСТВО РАСКРЫТИЯ ПЛОСКИХ КРУПНОГАБАРИТНЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2554901C2 |
| Способ сборки контактных узлов микровыключателей с двойным разрывом цепи и устройство для его осуществления | 1980 |
|
SU1035660A1 |
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2003 |
|
RU2256267C2 |
| Устройство для лужения изделий электронной техники | 1988 |
|
SU1581497A1 |
| Устройство для растяжения проволочной спирали | 1981 |
|
SU1000146A1 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
Изобретение относится к области измерения перемещений и может быть использовано для контроля стыковки и расстыковки космических кораблей. Сущность: акселерометр содержит корпус, подпружиненный шток, подвижно установленный в корпусе, контактные пластины и кулачок с контактной ламелью. При этом кулачок связан со штоком через средство его включения в цепь пластин, которое выполнено в виде двухпозиционного механического включателя с неустойчивым промежуточным состоянием и несимметричной зависимостью хода его упругого элемента от прямого и обратного перемещения штока. Кроме того, средство для включения кулачка может быть выполнено в виде поворотного относительно корпуса и связанного с ним посредством пружин растяжения рычага, снабженного роликом. При этом ролик контактирует с профилированной поверхностью рамки, закрепленной на штоке, а кулачок закреплен на этом рычаге. Технический результат: повышение надежности индикации при обеспечении нечувствительности устройства к относительным перемещениям объектов в пределах заданного допуска. 1 з.п. ф-лы, 1 ил.