Изобретение относится к геофизическим приборам, используемым для измерения угловых разворотов грунта относительно вертикальной оси под действием возмущений, возникающих при взрывах.
Такие азимутальные развороты грунта приводят к развороту стартов и установок для пуска ракет, что нарушает точность прицеливания.
Поэтому, важно знать угол разворота грунта и скорость его разворота на данном горизонте для выдачи исходных данных, необходимых при конструировании систем прицеливания.
Данное изобретение является усовершенствованием известного устройства, описанного в авт.св. №1840390 класс G 01 H 1/10.
В основном изобретении по авт.св. №1840390 описан датчик измерения азимутальных разворотов, используемый для измерения разворотов грунта относительно вертикальной оси при сейсмическом действии взрыва в грунте.
Этот датчик содержит корпус с размещенной в подшипниках инерционной массой и бесконтактный преобразователь смещения в электрический сигнал.
Датчик снабжен арретиром, включающим катушки электромагнита и предназначенным для фиксации положения инерционной массы.
Для измерения разворота грунта датчик устанавливается в измерительную скважину на заданной глубине, затем в скважину помещают грунтоцементный раствор и засыпают грунт с послойным уплотнением.
Перед опусканием датчика в скважину производится обязательная статическая тарировка преобразователя смещения, в качестве которого используется индуктивный (параметрический) преобразователь.
Выводы датчиков, установленных в скважины, соединяются кабельными линиями с регистрирующей аппаратурой, размещенной в приборном сооружении.
При производстве взрыва грунт разворачивается, а вместе с ним разворачивается и корпус датчика относительно инертной массы, при этом положение сердечника, связанного с инертной массой, изменяется относительно катушек, установленных на корпусе, а следовательно меняется и индуктивность, что и фиксируется регистрирующей аппаратурой. При этом изменение индуктивности находится в пропорциональной зависимости от величины разворота грунта. Сравнивая полученные данные с калибровочными, определяют величину угловых разворотов.
С помощью известного датчика нельзя получать выходной сигнал пропорциональный скорости угловых смещений, хотя в общем случае, путем дифференцирования зафиксированного перемещения, возможно определять скорость смещений. Однако следует учесть, что графическое дифференцирование вносит значительные погрешности в результаты измерений, а введение дифференцирующих электрических целей усложняет схему измерений и снижает надежность.
Целью дополнительного изобретения является получение сигнала пропорционального скорости угловых смещений.
Поставленная цель достигается тем, что в датчик дополнительно введены два постоянных магнита в виде колец, жестко связанных с инерционной массой, в отверстиях боковых стенок которых находятся по две индукционные катушки, установленные на сердечнике, который связан с основанием датчика, причем постоянные магниты расположены с противоположных сторон инерционной массы с шагом 180° перпендикулярно по отношению к индуктивным преобразователям.
Таким образом совокупность дополнительных элементов образует два индукционных преобразователя, у которых выходное напряжение, как известно, пропорционально скорости колебаний подвижной части.
Подвижные катушки вместе с сердечником перемещаются с измеряемой скоростью в магнитном поле, созданном в отверстиях боковых стенок кольцевым магнитом; в обмотках катушек индуцируются э.д.с. противоположных направлений. Чтобы эти э.д.с. складывались, обмотки катушек соединяются навстречу друг другу.
Э.д.с. (Е), индуцируемая в катушках, определяется из соотношения:
где w - число витков в катушках;
Dср - средний диаметр витка катушек b см;
B - магнитная индукция в зазоре b Вб/см2;
b - ширина поверхностей магнитопровода, ограничивавших воздушный зазор b см.;
Ф - магнитный поток в зазоре b Вб;
v - скорость перемещения катушек см/с.
Сигнал с катушек поступает на регистрирующую аппаратуру, например, магнитоэлектрический осциллограф типа H-119. По этому сигналу э.д.с. и тарировочным данным можно сразу, без дополнительных пересчетов, судить о скорости угловых колебаний.
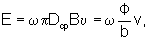
На фиг.1 изображен общий вид датчика сбоку, а на фиг.2 - вид датчика сверху.
Датчик содержит герметичный корпус 1 с размещенным в нем чувствительным элементом 2, представляющим инертную массу, установленную на оси 3 на радиально-упорных подшипниках. Чувствительный элемент 2 выполнен в виде металлического цилиндра. На чувствительном элементе закреплено два сердечника 4 индуктивного преобразователя. Сердечники расположены с шагом 180°. Сердечники индуктивного преобразователя входят в осевые отверстия многовитковых катушек 5, закрепленных на корпусе 1. В исходном положении край сердечника располагается в центре катушки. Обмотки катушек соединены по дифференциальной схеме.
Кроме того, на инертной массе установлено дополнительно два кольцевых магнита 6, расположенных с шагом 180° перпендикулярно по отношению к индуктивным преобразователям. Такое расположение магнитов и сердечников не нарушает балансировку инертной массы и повышает надежность измерений за счет дублирования сигнала. Магниты снабжены боковыми стенками 7 из магнитомягкого материала и закреплены на инертной массе при помощи кронштейнов 8 из немагнитного материала. В отверстиях боковых стенок 8 находятся индукционные катушки 9, установленные на сердечнике 10, связанном с корпусом датчика. Катушки находятся в магнитном поле, созданном в отверстиях стенок 7 кольцевым магнитом.
Для увеличения снимаемой э.д.с. обмотки катушек соединены навстречу друг другу.
Выводы от индукционных катушек подключены к регистрирующей аппаратуре.
Применение изобретения позволит измерять с помощью единого прибора величину азимутальных разворотов и скорость перемещения грунта. При этом точность измерения скорости значительно повышается, так как снимается сигнал непосредственно пропорциональный скорости перемещения.
Данные, полученные с помощью предлагаемого датчика, позволят более эффективно конструировать шахтные комплексы и повысят точность прицеливания при пусках ракет.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1977 |
|
SU1840394A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1979 |
|
SU1840397A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНОГО РАЗВОРОТА | 1979 |
|
SU1840399A1 |
| ДАТЧИК ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1972 |
|
SU1840390A1 |
| ИНЕРЦИАЛЬНЫЙ УГЛОМЕР | 1980 |
|
SU1840400A1 |
| Устройство для определения угла наклона | 1978 |
|
SU792074A1 |
| ДАТЧИК СКОРОСТИ | 2012 |
|
RU2521716C2 |
| Датчик параметров движения | 1986 |
|
SU1368620A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| ЭЛЕКТРОМАГНИТНЫЙ СКВАЖИННЫЙ ДЕФЕКТОСКОП | 2008 |
|
RU2372478C1 |

Датчик измерения азимутальных разворотов по авт.св. №1840390 содержит на инерционной массе дополнительно закрепленные два постоянных магнита в виде колец, в отверстиях боковых стенок которых находятся по две индукционные катушки, установленные на сердечнике. Сердечник связан с основанием датчика, причем постоянные магниты расположены с шагом 180 перпендикулярно по отношению индуктивным преобразователям. Технический результат - получение сигнала пропорционального скорости угловых смещений. 2 ил.
Датчик измерения азимутальных разворотов по авт.св. №1840390, отличающийся тем, что, с целью измерения угловой скорости, он снабжен двумя датчиками скорости, расположенными со сдвигом на 90° относительно бессердечниковых катушек и выполненных в виде закрепленных на инерционной массе полых цилиндрических магнитов с плоскими кольцевыми шайбами на торцах и двух размещенных на связанном с корпусом сердечнике индукционных катушек, помещенных в отверстиях кольцевых шайб.

