Предлагаемое изобретение относится к геофизическим приборам, используемым для измерения угловых разворотов грунта и сооружений относительно вертикальной оси под действием возмущений, возникающих при мощных взрывах.
Такие возмущения приводят к развороту стартов и установок для пуска ракет, что нарушает точность прицеливания, так как величины азимутальных разворотов значительно превышают допустимые ошибки прицеливания при пусках ракет.
Поэтому для восстановления прицеливания необходимо точно и оперативно определять угол разворота систем прицеливания ракетных комплексов.
В настоящее время известны датчики для измерения азимутальных разворотов грунта относительно вертикальной оси под действием возмущений, возникающих при мощном взрыве.
Эти приборы состоят из корпуса с размещенной в подшипниках жесткой инерционной массой и бесконтактного преобразователя смещения в электрический сигнал. Датчики устанавливаются на поверхности грунтового массива или помещаются в скважину на заданную глубину и закрепляются при помощи грунтоцементного раствора. При производстве взрыва грунт разворачивается, а вместе с ним разворачивается и корпус датчика относительно инертной массы, при этом положение сердечника изменяется относительно катушек, что приводит к выработке сигнала, пропорционального углу разворота грунта. Получаемый сигнал регистрируется аппаратурой, установленной в приборном сооружении (см. авт.св. №1840390 кл. G 01 H 1/10, 1840393, кл. G 01 H).
В этих датчиках вес инерционной массы должен быть ˜6 кг, что при перегрузках в 100 единиц создает усилие на подшипники до 600 кг. Поэтому в датчиках применяют подшипники, рассчитанные на большие перегрузки. Такие подшипники имеют большие моменты трения, что снижает точность измерений.
В СССР и за рубежом известны датчики для измерения параметров угловых колебаний, имеющие жидкостную инерционную массу, помещенную в корпус, выполненный в виде тора (см. авт.св. СССР №381033 кл. G 01 P 15/08, №493736 кл. G 01 P 3/12, №544922 кл. G 01 P 15/08, патента Франции №1601547 кл. G 01 P, №2279110 кл. G 01 P 15/08), например, прибор, описанный в заявке Великобритании №1344811 кл. G 1 N, содержит кольцевой желоб, заполненный жидкостью. В желобе имеется перегородка и два пьезопреобразователя. При колебаниях жидкости преобразователи вырабатывают сигнал.
Этот прибор сложен в изготовлении и предназначен для измерения вращательных движений, например, буровой коронки. К перемещениям на небольшие углы в 1÷3° он малочувствителен.
В журнале "Вопросы ракетной техники" №2, М.: Мир, 1970, с.80-88, описан угловой акселерометр. Этот прибор представляет заполненную жидкостью кольцевую трубку, удерживаемую моментным серводвигателем. В приборе применяется жидкостный ротор, который сам обеспечивает собственный подвес.
Однако этот прибор сложен в изготовлении, а также низка его надежность при больших перегрузках (до 100 единиц), возникающих при мощном взрыве.
Из известных и используемых в настоящее время измерителей угловых разворотов грунта при мощных взрывах наиболее близким по технической сущности является устройство для измерения азимутальных разворотов, описанное в изобретении по авт.св. №1840394 кл. G 01 C 1/00, G 01 H 1/10, которое и взято в качестве прототипа.
Это устройство состоит из герметичного корпуса, в котором в подшипниках качения установлен ротор, включающий полый цилиндр с лопастями. На верхнем основании установлены катушки индуктивных преобразователей. Сердечники преобразователей при помощи кронштейнов связаны с симметричными лопастями ротора.
Для постановки сердечников преобразователей в исходное положение и для отклонения их на угол тарировки при контроле измерительного канала непосредственно перед взрывом на верхнем основании установлены со смещением, равным тарировочному, две катушки электромагнитов, в которых находятся постоянные цилиндрические магниты, связанные с лопастями ротора. Внутри корпуса залита жидкость, а вес ротора равен весу вытесненной жидкости.
В этом приборе подвижным чувствительным элементом является ротор, от подвижности которого зависит чувствительность прибора и точность измерений. При существующей конструкции прибора проконтролировать подвижность ротора и произвести регулировку усилия его зажатия не представляется возможным.
В этом приборе ротор вращается в двух миниатюрных повышенной точности подшипниках, установленных в днище корпуса и в верхнем съемном основании. Осевое зажатие подшипников, от которой зависит подвижность ротора, осуществляется винтами, крепящими верхнее основание к корпусу. При этом может получаться некоторый перекос подшипников за счет неравномерного зажатия винтов, крепящих верхнее основание к корпусу через упругую герметизирующую прокладку, или за счет разброса допусков установочных размеров.
Однако проверить подвижность ротора после сборки прибора и отрегулировать его подвижность не представляется возможным. Поэтому, как показали исследования, измерения с помощью данных приборов одной партии и изготовленных по одной и той же документации, могут отличаться на ±15%, за счет неодинаковой подвижности ротора.
Кроме того, подвижность чувствительного элемента целесообразно проверять после длительного хранения и транспортировки непосредственно перед использованием устройств.
Целью предлагаемого изобретения является устранение указанных недостатков, а именно - повышение удобства эксплуатации и настройки и повышение тем самым чувствительности.
Поставленная цель достигается тем, что ротор установлен между двух дисков, жестко связанных между собой стойками с регулируемой длиной, при чем один из дисков является верхним основанием корпуса.
Кроме того, между нижним диском и днищем корпуса установлен упругий элемент в виде кольца. При таком конструктивном исполнении прибора ротор не связан непосредственно с корпусом и поэтому имеется возможность перед установкой чувствительного элемента с преобразователями в корпус контролировать подвижность ротора и регулировать его зажатие между подшипниками за счет раздвижных стоек. Кроме того, после транспортировки легко извлечь чувствительный элемент с преобразователями из корпуса, проверить и в случае необходимости отрегулировать его подвижность.
При этом при установке его в корпус регулировка не нарушится и не будет зависеть от степени затяжки винтов, крепящих верхнее основание, так как между нижним диском и днищем корпуса предусмотрен определенный зазор, в котором помещен упругий элемент в виде кольца.
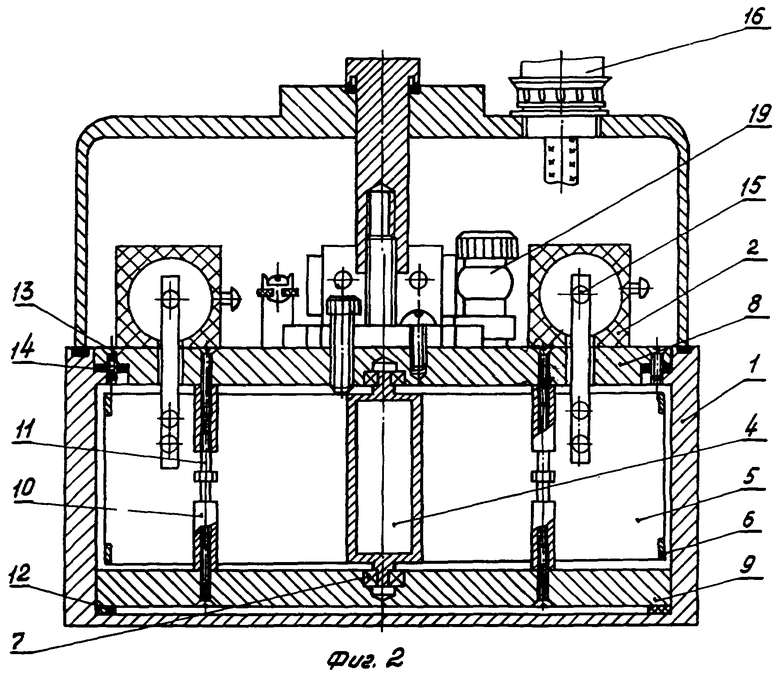
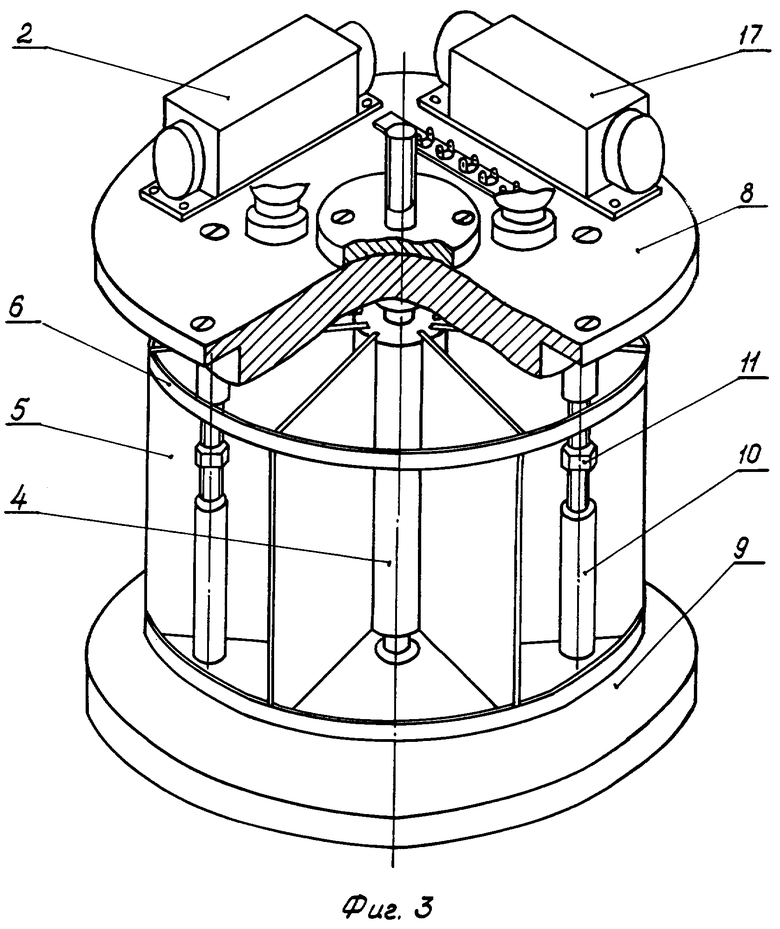
На чертежах изображен общий вид устройства сверху - фиг.1, вид сбоку - фиг.2, общий вид чувствительного элемента с преобразователями - фиг.3.
Устройство состоит из корпуса 1, преобразователей, рабочей жидкости 3, ротора, включающего пустотелый герметичный цилиндр 4 с лопастями 5, бандажных колец 6. Ротор, являющийся подвижным чувствительным элементом, установлен в двух повышенной точности подшипниках 7, размещенных в верхнем 8 и нижнем 9 дисках, причем верхний диск является верхним основанием корпуса. Диски жестко связаны между собой вертикальными стойками, каждая из которых состоит из двух частей 10, связанных двусторонним винтом 11. Вращая винт 11, можно изменять длину стоек и регулировать степень осевого зажатия ротора в подшипниках.
Между нижним диском и днищем корпуса помещен упругий элемент 12, позволяющий компенсировать возможные перекосы при установке ротора с дисками в корпус, которые могут возникать в результате неравномерной затяжки винтов 13, крепящих верхнее основание к корпусу. Между верхним основанием и корпусом установлена герметизирующая прокладка 14. Преобразователи 2, установленные на верхнем основании, включают герметичный корпус с катушками индуктивности, в осевые отверстия которых входят сердечники 15, связанные при помощи кронштейнов с лопастями ротора.
Обмотки катушек соединены по дифференциальной схеме. Выводы катушек из датчика осуществлены многожильным кабелем, через герметичный разъем 16.
Для дистанционной постановки сердечников преобразователей в исходное положение и для отклонения их на угол тарировки при контроле измерительного канала непосредственно перед взрывом на верхнем основании установлены со смещением, равным тарировочному, два герметичных корпуса 17 с катушками электромагнитов, внутри которых с шагом 180° находятся два постоянных магнита 18, связанные с лопастями ротора. Жидкость в корпус заливается через отверстие 19, закрытое заглушкой.
После транспортировки откручивают винты 13, вынимают за верхнее основание 8 ротор в сборе с нижним диском 9 и проверяют подвижность ротора, обращая внимание на то, чтобы не было заеданий или задеваний подвижных частей. При необходимости регулируют положение ротора и степень осевого усилия на него винтами 11. После проверки диски устанавливают в корпус и заливают рабочую жидкость.
Устройство опускают в скважину до заданного горизонта и закрепляют при помощи грунтоцементного раствора. При прохождении сейсмовзрывных волн грунт разворачивается, вместе с ним движется корпус 1 с катушками 2, а инерционная масса 3 (жидкость) с ротором и сердечниками 15 остаются в исходном положении, при этом меняется индуктивность преобразователя пропорционально углу поворота, что и регистрируется соответствующей аппаратурой.
Испытания партии приборов в количестве 4 экземпляров показали, что после соответствующей проверки и регулировки подвижности ротора чувствительность у всех устройств была одинаковой, а расхождения в процессе измерений не превышали ±3%.
Применение изобретения позволит осуществлять контроль и регулировку подвижности чувствительного элемента, за счет чего повысится чувствительность приборов и точность измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1977 |
|
SU1840394A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1979 |
|
SU1840397A2 |
| ИНЕРЦИАЛЬНЫЙ УГЛОМЕР | 1980 |
|
SU1840400A1 |
| ДАТЧИК ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1977 |
|
SU1840393A2 |
| ДАТЧИК ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1972 |
|
SU1840390A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Устройство для определения угла наклона | 1978 |
|
SU792074A1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1980 |
|
SU901818A2 |
Устройство для измерения азимутальных разворотов содержит корпус, жидкостную инерционную массу, взвешенный ротор в виде пустотелого герметичного цилиндра с лопастями и преобразователи перемещения в электрический сигнал. Ротор установлен между двух дисков, жестко связанных между собой стойками с регулируемой длиной. Причем один из дисков является верхним основанием корпуса, а между нижним диском и днищем корпуса установлен упругий элемент в виде кольца. Технический результат - повышение удобства эксплуатации и настройки и повышение чувствительности и точности измерений. 3 ил.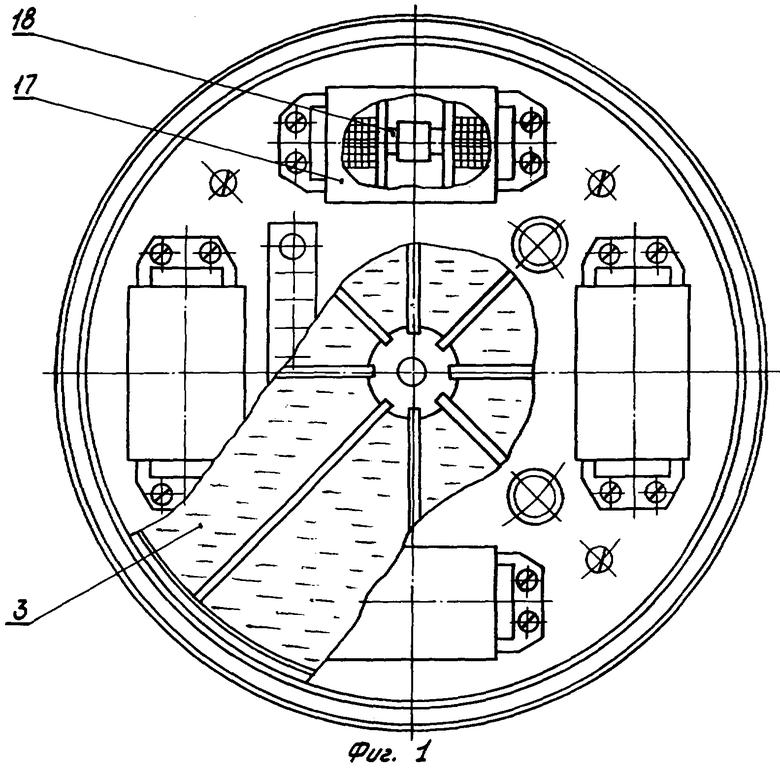
Устройство для измерения азимутального разворота, содержащее корпус, заполненный жидкостью, служащей инерционной массой, взвешенный в ней ротор в виде пустотелого герметичного цилиндра с лопастями, связанными с элементами преобразователя перемещения в электрический сигнал, расположенного на корпусе, отличающееся тем, что, с целью осуществления контроля и регулировки подвижности ротора и повышения тем самым чувствительности устройства, в него введены два диска, связанные между собой стойками с регулируемой длиной, между дисками установлен ротор, причем один из дисков является верхним основанием корпуса, а между нижним диском и днищем корпуса установлен упругий элемент в виде кольца.
| "Вопросы ракетной техники", изд | |||
| Мир, М., 1970, №2, с.86-88 | |||
| Авт | |||
| св | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1979 |
|
SU1840397A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авт | |||
| св | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНЫХ РАЗВОРОТОВ | 1977 |
|
SU1840394A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

