(21)4014157/25-28
(22)21.01.86
(46) 23.01,88.Бкш. 3 (72) П.М.Шердаков
(53)621.317.39:531.717(088.8)
(56)Бибер Л.А. и }Кданова Ю.Е. Низкочастотные маятниковые виброметры. - М.: Энергия, 1980, с. 36.
Фриш С.Э.и Тиморева А.В. Курс общей физики, Т.1. М.: Гостехиздат, 1951, с. 72.
Авторское свидетельство СССР № 235364, кл. G 01 Р 3/52, 1967.
(54)ДАТЧИК ПАРАМЕТРОВ ДВИЖЕНИЯ
(57)Изобретение относится к измерительной технике и позволяет повысить точность измерения параметров движения - величины линейных смещений и их скорости при высокоинтенсивных силовых воздействиях, напри- мер взрывах. Датчик параметров движения содержит два разномассовых инерционных элемента 7 и 8, один из
которых представляет собой ферромагнитный сердечник, а другой - постоянный магнит. Эти элементы закреплены на гибком тросике 11, перекинутом через блоки 10 и образующем замкнутое кольцо, и в процессе измерений перемещаются внутри катушек 2 и 3 индуктивности, закрепленных в корпусе 1 датчика параллельно одна другой. В зависимости от соотношения масс инерционных элементов 7 и 8 перемещение их будет во много раз меньшим, чем перемещение объекта контроля, передаваемое на корпус 1 датчика. На выходе катушки 2 индуктивности, чувствительной к перемещению ферромагнитного сердечника,формируется сигнал, пропорциональный смещению корпуса 1, а на выходе катушки 3 индуктивности, чувствительной к перемещению постоянного магнита, формируется сигнал, пропорциональный скорости смещения корпуса датчика. 1 ил.
€
Ча5:«а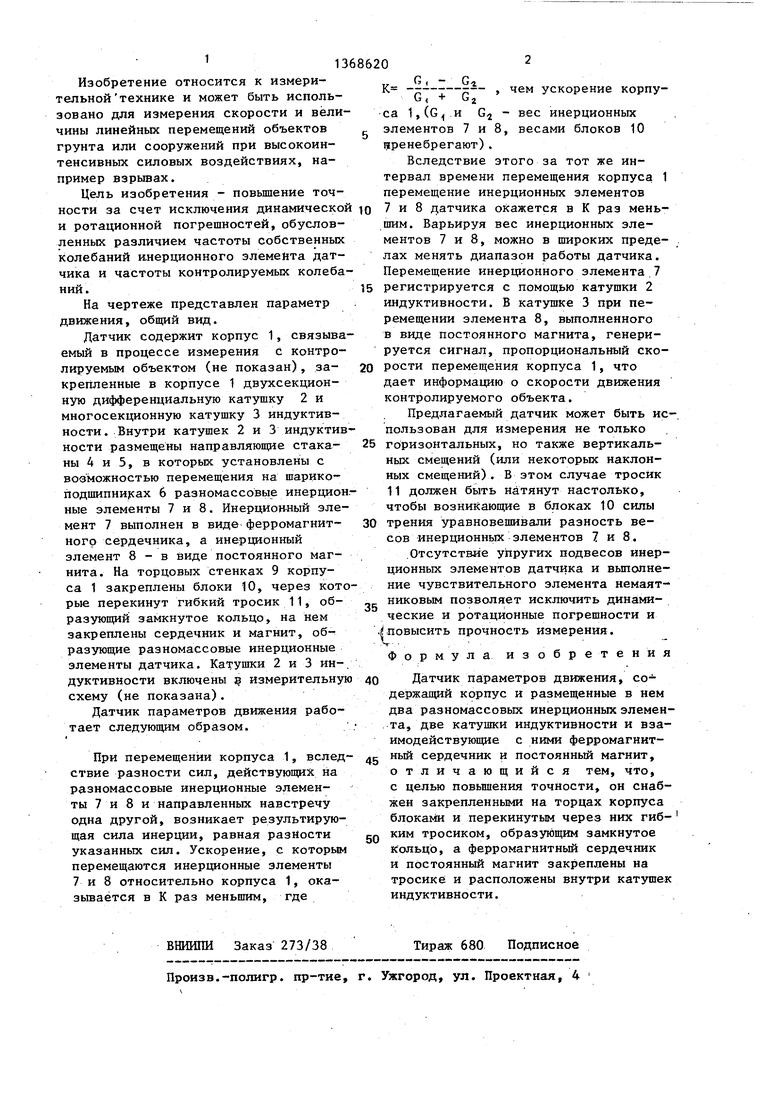
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОДАТЧИК | 2007 |
|
RU2343401C1 |
| Индуктивный датчик вибраций | 1981 |
|
SU1302147A1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| Устройство для контроля и регулированияРАзгРузОчНОй щЕли КОНуСНОйиНЕРциОННОй дРОбилКи | 1977 |
|
SU808152A1 |
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| ДАТЧИК ДАВЛЕНИЯ | 2016 |
|
RU2620450C1 |
| ДАТЧИК СКОРОСТИ | 2012 |
|
RU2521716C2 |
| ДАТЧИК ЛИНЕЙНОГО УСКОРЕНИЯ | 2004 |
|
RU2265857C1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |

иг
13
Изобретение относится к измерительной технике и может быть использовано для измерения скорости и величины линейных перемещений объектов грунта или сооружений при высокоинтенсивных силовых воздействиях, например взрьшах.
Цель изобретения - повьшение точности за счет исключения динамической и ротационной погрешностей, обусловленных различием частоты собственных колебаний инерционного элемента датчика и частоты контролируемых колебаний.
На чертеже представлен параметр движения, общий вид.
Датчик содержит корпус 1, связываемый в процессе измерения с контролируемым объектом (не показан), за- крепленные в корпусе 1 двухсекционную дифференциальную катушку 2 и многосекционную катушку 3 индуктивности. Внутри катушек 2 и 3 индуктивности размещены направляющие стака- ны 4 и 5, в которых установлены с возможностью перемещения на шарико- подшипнирах 6 разномассовые инерцион ные элементы 7 и 8. Инерционный элемент 7 выполнен в виде ферромагнит- ногр сердечника, а инерционный элемент 8 - в виде постоянного магнита. На торцовых стенках 9 корпуса 1 закреплены блоки 10, через которые перекинут гибкий тросик 11, об- разуюш й замкнутое кольцо, на нем закреплены сердечник и магнит, об- разующие разномассовые инерционные элементы датчика. Катушки 2 и 3 индуктивйости включены щ измерительную схему (не показана).
Датчик параметров движения работает следующим образом.
При перемещении корпуса 1, вследствие разности сил, действующих на разномассовые инерционные элементы 7 и 8 и направленных навстречу одна другой, возникает результирующая сила инерции, равная разности указанных сил. Ускорение, с которым перемещаются инерционные элементы 7 и 8 относительно корпуса 1, ока- зьтаётся в К раз меньшим, где
к
5
0 5 0 0
, чем ускорение корпу5
G, - G
са 1,(0.и G - вес инерционных элементов 7 и 8, весами блоков 10 пренебрегают).
Вследствие этого за тот же интервал времени перемещения корпуса 1 перемещение инерционных элементов 7 и 8 датчика окажется в К раз меньшим. Варьируя вес инерционных элементов 7 и 8, можно в широких пределах менять диапазон работы датчика. Перемещение инерционного элемента 7 регистрируется с помощью катушки 2 индуктивности. В катушке 3 при перемещении элемента 8, выполненного в виде постоянного магнита, генерируется сигнал, пропорциональный скорости перемещения корпуса 1, что дает информацию о скорости движения контролируемого объекта.
Предлагаемый датчик может быть использован для измерения не только горизонтальных, но также вертикальных смещений (или некоторых наклонных смещений). В этом случае тросик 11 должен быть натянут настолько, чтобы возникающие в блоках 10 силы трения уравновешивали разность весов инерционных элементов 7 и 8.
Отсутствие упругих подвесов инерционных элементов датчика и выполнение чувствительного элемента немаят- никовым позволяет исключить динамические и ротационные погрешности и прочность измерения.
4 повысить
изо
р е т е н и я
Формула
Датчик параметров движения, содержащий корпус и размещенные в нем два разномассовых инерционных элемента, две катушки индуктивности и взаимодействующие с ними ферромагнитный сердечник и постоянный магнит, отличающийся тем, что, с целью повьш1ения точности, он снабжен закрепленными на торцах корпуса блоками и перекинутым через них гиб- КИМ тросиком, образующим замкнутое кольцо, а ферромагнитный сердечник и постоянный магнит закреплены на тросике и расположены внутри катушек индуктивности.
