Предлагаемое изобретение относится к области точного приборостроения и может быть использовано при работе гироориентаторов в составе навигационного комплекса (например, в прецизионной инерциальной системе, см. журнал «Гироскопия и навигация» №4, 1996 год, издание ЦНИИ «Электроприбор», Санкт-Петербург, статья А.С.Анфиногенова и др. «Прецизионная корабельная навигационная система на электростатических гироскопах», стр.103-108).
Известно, что при наличии остаточной несферичности ротора электростатического гироскопа (ЭСГ) линейные смещения ротора гироскопа относительно электродов подвеса корпуса гироскопа приводят к возникновению уводящих моментов (см. монографию Ю.Г.Мартыненко «Движение твердого тела в электрических и магнитных полях». - Москва, Наука, 1988 г., с.113-114).
Существуют различные способы автокомпенсации уводящих моментов, действующих на гироскоп и связанных с его корпусом, чем обеспечивается повышение точности гироскопа при использовании (см. книгу «Автокомпенсация инструментальных погрешностей гиросистем», авторы С.М.Зельдович и др., изд. «Судостроение», 1976 г., УДК531382 - аналог способа).
Существо способов автокомпенсации состоит в придании отдельным элементам и узлам гироскопического устройства дополнительных механических движений, позволяющих осуществить модуляцию уходов гироприборов, и в конечном итоге превратить эти уходы из монотонных в периодические функции времени с ограниченной амплитудой. К этим способам относятся принудительное вращение гироскопических чувствительных элементов вокруг оси вращения их роторов, реверсирование векторов кинетических моментов гироскопов и др.
Однако вращение чувствительного элемента ЭСГ вокруг оси вращения ротора автокомпенсирует уводящие моменты от смещения несферичного ротора перпендикулярно его оси вращения, оставляя неизменными моменты от смещения вдоль оси вращения.
Реверсирование вектора кинетического момента позволяет осуществлять автокомпенсацию всех составляющих ухода гироскопа, однако при таком способе автокомпенсации необходимо периодически разгонять и тормозить ротор гироскопа, что требует значительных промежутков времени, а также нарушает тепловой режим гироскопа.
В качестве прототипа предлагаемого изобретения выбран способ автокомпенсации принудительным вращением подвеса гироскопа, установленного в двухосном гиростабилизаторе, описанном в вышеуказанной книге «Автокомпенсация инструментальных погрешностей гиросистем», стр.85-86. Способ-прототип основан на вращении подвеса гироскопа вокруг оси, параллельной вектору кинетического момента ротора гироскопа. Использование этого способа позволяет исключить влияние на уходы ЭСГ моментов, вызванных смещением несферичного ротора в вакуумной камере вдоль осей, перпендикулярных вектору кинетического момента гироскопа. Основной недостаток этого способа заключается в том, что моменты, вызванные смещением ротора в вакуумной камере вдоль вектора кинетического момента, не автокомпенсируются.
Задачей предлагаемого изобретения является повышение точности ЭСГ путем исключения уходов от моментов, связанных со смещением его ротора вдоль оси, параллельной вектору кинетического момента.
Эта задача решается тем, что через равные промежутки времени корпус гироскопа поворачивают на 180° относительно оси, перпендикулярной вектору кинетического момента гироскопа. Указанные повороты изменяют через равные промежутки времени знак момента, т.е. автокомпенсируют его.
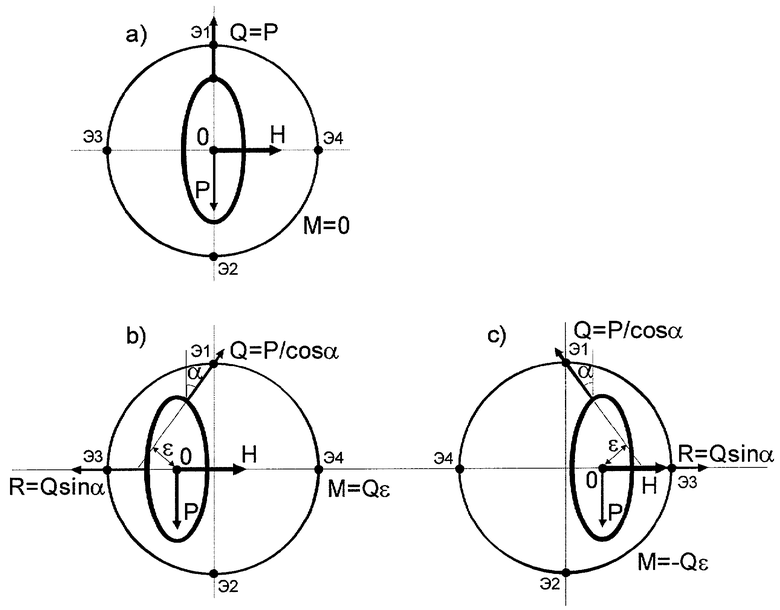
Способ автокомпенсации поясняется чертежом. Здесь 1 - ротор с остаточной несферичностью, 2 - камера, Э1…Э4 - электроды подвеса (указаны центры электродов), H - вектор кинетического момента ротора, P - вес ротора, Q, R - силы тяжения подвеса, действующие по нормали к поверхности ротора, ε - отстояние центра масс ротора от линии действия силы Q, О - центр масс ротора, M - момент, вызываемый отстоянием центра масс ротора от линии действия силы Q, α - угол, характеризующий несферичность ротора, чертеж а - ротор в центре камеры, чертеж в, с - ротор смещен относительно центра камеры. (Следящие системы подвеса удерживают ротор в неизменном линейном положении относительно электродов камеры.) Из чертежа в, с видно, что при перевороте камеры вокруг оси, перпендикулярной вектору  , уводящий момент M изменяет свое направление, что приводит к автокомпенсации уходов ротора от его смещения вдоль оси вращения.
, уводящий момент M изменяет свое направление, что приводит к автокомпенсации уходов ротора от его смещения вдоль оси вращения.
Осуществление способа производится следующим образом.
Гироориентатор навигационного комплекса через равные промежутки времени переводится из режима стабилизации направления с опорой на ЭСГ в режим наведения корпуса гироскопа на 180° относительно первоначального направления, причем наведение производится разворотом корпуса вокруг оси, перпендикулярной вектору кинетического момента гироскопа. После выполнения этой операции гироориентатор переводится в режим стабилизации направления с учетом информации от средств навигационного комплекса (дублирующее изделие либо вертикаль и компас).
Реализация этого способа в ЦНИИ «Электроприбор» позволяет повысить точность ЭСГ.
Технико-экономическая эффективность изобретения заключается в повышении точности ЭСГ.
В связи с отсутствием сведений о потребностях страны в количестве таких гироскопов экономический эффект изобретения подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2296298C1 |
| СПОСОБ КОРРЕКЦИИ ПРОГРАММНОГО ДВИЖЕНИЯ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2386106C1 |
| СПОСОБ КАЛИБРОВКИ УГЛОВ РАССОГЛАСОВАНИЯ ОСИ ДАТЧИКА УГЛА НЕУПРАВЛЯЕМОГО ГИРОСКОПА ОТНОСИТЕЛЬНО ОСИ ВРАЩЕНИЯ ЕГО КОРПУСА | 2005 |
|
RU2308683C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2004 |
|
RU2269745C1 |
| СПОСОБ НАСТРОЙКИ КРИОГЕННОГО ГИРОСКОПА | 1983 |
|
SU1840511A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2640967C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2007 |
|
RU2338999C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2006 |
|
RU2327954C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации инерциальных систем на электростатических гироскопах. Технический результат - повышение точности. Для достижения данного результата осуществляют развороты корпуса гироскопа через равные промежутки времени на 180° относительно оси, перпендикулярной вектору кинетического момента гироскопа. Способ позволяет исключить влияние на уходы ротора электростатического гироскопа уводящих моментов, вызываемых смещением ротора вдоль оси, параллельной вектору кинетического момента ротора. 1 ил.
Способ автокомпенсации уходов электростатического гироскопа, основанный на вращении корпуса гироскопа относительно его ротора, отличающийся тем, что корпус гироскопа поворачивают через равные промежутки времени на 180° относительно оси, перпендикулярной вектору кинетического момента гироскопа.
| Автокомпенсация инструментальных погрешностей гиросистем | |||
| ЗЕЛЬДОВИЧ С.М | |||
| и др | |||
| - М.: Судостроение, 1976, с.85-86 | |||
| АНФИНОГЕНОВА А.С.и др | |||
| Прецизионная корабельная навигационная система на электростатических гироскопах | |||
| «Гироскопия и навигация», №4, ЦНИИ «Электроприбор» | |||
| - С.-Пб., 1996, с.103-108 | |||
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2296298C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| СПОСОБ НАСТРОЙКИ КРИОГЕННОГО ГИРОСКОПА | 1983 |
|
SU1840511A1 |

