Изобретение относится к о.бласти гироскопического пригборост/роения и решает задачу создания лрецизионного гироскопа со сферическим ротором и электростатическим подвесом.
Известные решения той же технической задачи имеют электродина.мическую систему подвеса ротора с линейным регулятором переменного напряжения высокой частоты.
Однако в известных устройствах, используюш,ихся в бесплатформенных системах инерциальной навигадии, возникают возмущаю.щие моменты, вызывающие уход гироскопа, обусловленные несферичностью ротора, а также ограниченная несущая способность подвеса.
Предложенное устройство позволяет скомпенсировать воЗ.мущающие моменты, обусловленные несферичностью ротора и повысить его поддерживающую силу.
Эта цель достигается за счет введения замкнутого «онтура регулирования на каждой паре поддерживающих электродов. В замкнутом «онтуре К электродам подключены две лараллельные ветви, содержащие сумматоры и выпрямители, выходы которых через третий сумматор соединены с интегратором, который в свою очередь через модулятор соедииен с одним из входов четвертого сумматора. Второй вход этого сумматора через модулятор
подсоединен к источнику уравновешивания подвеса. Выход же четвертого сумматора через согласующий трансформатор подается на электроды.
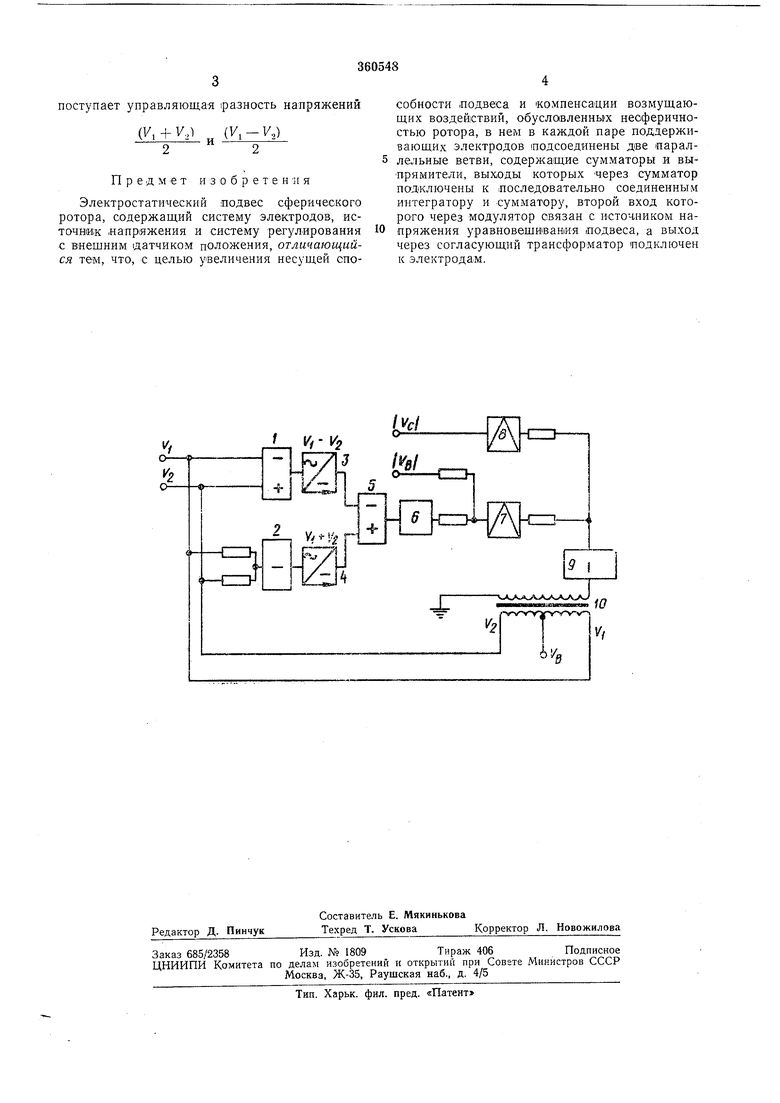
На чертеже представлена структурная схема электростатического лодвеса.
Напряжения У, и с электродов поступают на две параллельные ветви, .каждая из которых содержит сумматоры 7 и 2 и выпрямители 3 и 4 соответственно. При этом сумматор / обеспечивает получение разности напряжений, а су.мматор 2 - су.ммы. После преобразования выходы параллельных ветвей суммируются на сумматоре 5, вход которого связан с интегратором 6. Выход интегратора 6 в.месте с напряжением (Ув) источника смещения через .модулятор 7 н выход источника напряжения уравновешивания подвеса (V,-) через модулятор 8 объединены на входе сумматора 9, .который через согласующий трансформатор 10 напружен на электроды подвеса.
Описанная схема позволяет обеспечить стабилизацию суммы квадратов напряжений 25 иа диаметрально противоположных электродах и представляет собой замкнутый контур регулирования с жесткой обратной связью. Исполнительны.м эле.ментом .следящей системы является интегратор 6, на вход которого 30 через сумматоры 1, 2, 5 -ц выпрямители 5 и #
поступает управляющая разность напряжений
(V,
Предмет и з о б р е т е н и я
Электростатический подвес сферического ротора, содержащий систему электродов, источник напряжения и систему регулирования с внешним датчиком положения, отличающийся тем, что, с целью увеличения несущей способности лодвеса и компенсации возмущающих воздействий, обуславленньгх несферичностью ротора, в нем в каждой паре поддерживающих электродов оодсоединены две паралле чьные ветви, содержащие сумматоры и выпрямители, выходы которых через сумматор подключены к последовательно соединенным интегратору и сумматору, второй вход которого через модулятор связан с источником напряжения уравновешищания подвеса, а выход через согласующий трансформатор подключен к электродам.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПОДВЕСКИ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1971 |
|
SU309243A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ НАСТРОЙКИ КРИОГЕННОГО ГИРОСКОПА | 1983 |
|
SU1840511A1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГРЕБЕНЧАТЫМ ДВИГАТЕЛЕМ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2005 |
|
RU2282150C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| Криогенный гироскоп | 2016 |
|
RU2643942C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
