Предлагаемое устройство относится к средствам гидроакустического противодействия (ГПД) и может быть использовано в имитаторах морских целей, например в имитаторе подводной лодки (ПЛ). Эффективность работы имитатора ПЛ определяется степенью соответствия параметров имитируемых им эхо-сигналов параметрам эхо-сигналов, отраженных от реальной подводной лодки.
Зарубежные, защищенные патентами США № 3.609.671, МКЛ 340-3Е, №3.610.798, НКЛ. 35-10.4, № 3.316.840, НКЛ 102-66, а также "Имитатор подводной лодки" 21В12 (США), "Самоходный глубоководный имитатор подводной лодки" (Великобритания) и др., имитирующие эхо-сигналы, отраженные от борта ПЛ (в угле ±10°).
Недостатком указанных имитаторов является отсутствие возможности изменений параметров сигнала в тракте имитатора в соответствии с изменениями структуры сигналов при отражении их от реальных целей в зависимости от ракурса облучения цели, т.е. отсутствии возможности имитации корреляционных характеристик эхо-сигнала в зависимости от угла их отражения от цели.
Из известных имитаторов наиболее близким по технической сущности является "Имитатор эхо-сигналов", описанный в патенте США № 3.641.485, НКЛ 340-3K, содержащий приемо-усилительный тракт, устройство определения угла прихода сигналов, схему памяти и передающий тракт. Выходы приемо-усилительного тракта и устройства определения угла прихода сигнала соединены со входом схемы памяти, а выход схемы памяти - с передающим трактом. В указанном имитаторе производится удлинение эхо-сигнала в зависимости от угла прихода сигнала. Недостатком этого имитатора является также отсутствие возможности имитации корреляционных характеристик эхо-сигнала в зависимости от угла отражения эхо-сигналов от цели.
В современных гидролокаторах в режимах активного обнаружения целей все шире находят применение корреляционные методы приема и обработки эхо-сигналов, которые позволяют путем сравнения эхо-сигналов с копиями возможных эхо-сигналов, хранящихся в памяти гидролокатора, помимо определения основных данных о дальности, радиальной скорости цели, производить и классификацию цели по максимальному уровню корреляции, ширине корреляционной функции в зависимости от ракурса цели [см. Простаков А.Л. "Гидроакустика в иностранных флотах". Л., "Судостроение", 1964; Простаков А.Л. "Гидроакустика и корабль". Л., "Судостроение", 1967].
Целью настоящего изобретения является имитация корреляционных характеристик эхо-сигналов в зависимости от угла отражения сигнала от цели.
Указанная цель достигается тем, что в имитатор введены корректор частотной характеристики, корректор фазовой характеристики, соединенные между собой последовательно и включенные между выходом схемы памяти и входом передающего тракта, а также схема управления элементами корректоров, вход которой соединен с выходом схемы определения угла прихода сигнала, а выход - по цепям управления со входами схем корректоров частотной и фазовой характеристик. Однако следует отметить, что указанный признак "введение корректора частотной характеристики" нельзя отнести к новому признаку, так как известны имитаторы, содержащие корректор частотной характеристики, предназначенный для выравнивания частотной характеристики тракта.
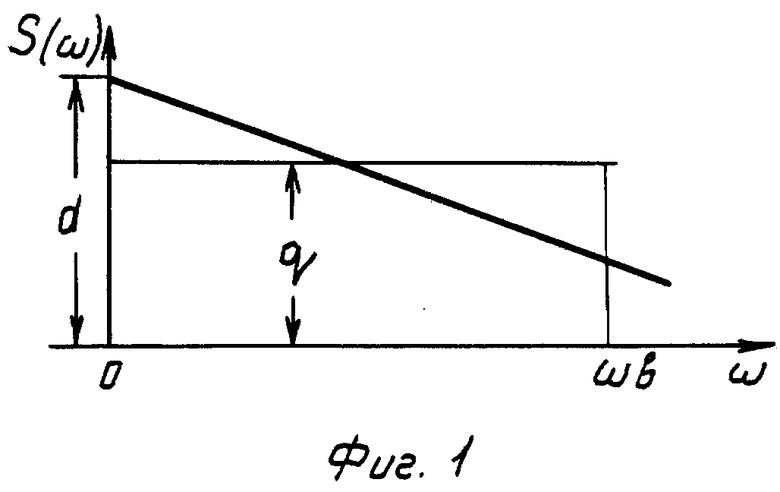
На фиг.1 представлена амплитудно-частотная характеристика;
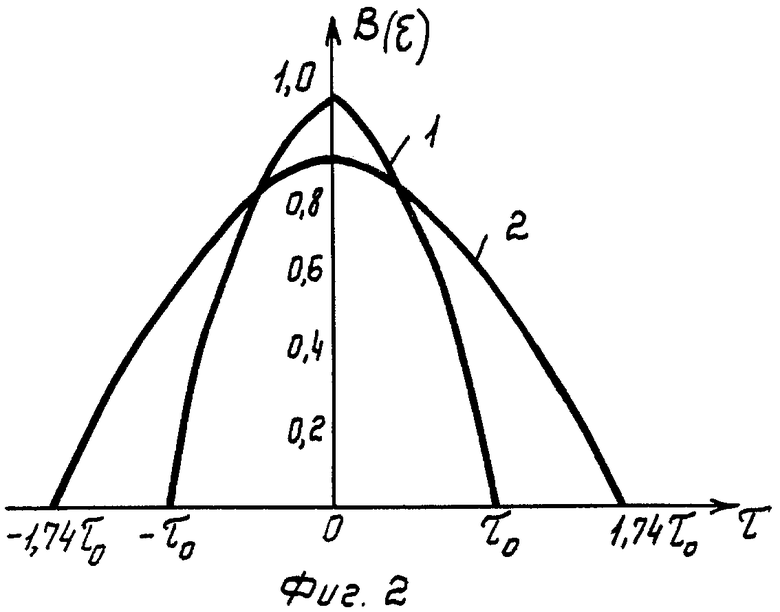
на фиг.2 представлены расчетные корреляционные функции;
на фиг.3 - блок-схема предлагаемого устройства.
Влияние частотной и фазовой характеристик в тракте на уровень и форму функции взаимной корреляции исследовано в ряде работ [Ганзинг К.И., Лапицкая И.Ф. Влияние амплитудно-частотных искажений четырехполюсника на функцию взаимной корреляции - "Вопросы радиоэлектроники", ТПС, 1968, №6; Ганзинг К.И., Лапицкая И.Ф. Влияние фазочастотных искажений четырехполюсников на функцию взаимной корреляции - "Вопросы радиоэлектроники", ТПС, 1968, №6]. В качестве примера рассмотрим методику оценки влияния амплитудно-частотной характеристики с равномерным спадом к верхним частотам, показанным на фиг.1, где
S(ω)=d-κω; q - значение спектральной плотности выходного напряжения сигнала для идеального случая плоской характеристики, равное единице;
κ - коэффициент спада амплитудно-частотной характеристики;
ω - круговая частота;
d - значение спектральной плотности выходного напряжения сигнала на частоте максимального подъема амплитудно-частотной характеристики.
Выражение для расчета функции взаимной корреляции в этом случае будет
 .
.
Расчетные корреляционные функции для двух амплитудно-частотных характеристик, отличающихся крутизной спада, представлены на фиг.2, где
1. κ=0; d=q=1;
2. κ= ; d=1,73.
; d=1,73.
Таким образом, изменение наклона амплитудно-частотной характеристики в тракте имитатора дает возможность получать различные значения функции взаимной корреляции между входными и выходными сигналами в тракте. Аналогичным образом изменение параметров фазовой характеристики дает возможность изменять уровень и ширину функции взаимной корреляции. Вводя частотную и фазовую коррекцию в тракте имитатора, получаем наибольшее значение уровня корреляции между сигналами, этот случай соответствует физической картине при отражении сигналов от бортовых углов подводной лодки (″блестящая точка″). Отключая частотный и фазовый корректоры, либо вводя специально искажения частотной и фазовой характеристик в тракт имитатора, получаем снижение уровня корреляции между входным сигналом и эхо-сигналом на выходе имитатора, что соответствует физической картине при отражении эхо-сигнала от реальной цели при небортовых углах облучения. В простейшем случае количество градаций величины коэффициента корреляции в зависимости от угла прихода сигнала в тракт имитатора может быть сведено к двум, соответствующим включению коррекции частотной и фазовой характеристик и к ее выключению. При этом для изменения уровня корреляции эхо-сигналов в тракте имитатора будет использована имеющаяся неравномерность амплитудно-частотной и фазово-частотной характеристик вследствие неидеальности характеристик приемо-излучающего тракта имитатора.
Блок-схема предлагаемого устройства (см. фиг.3) содержит гидроакустические приемники 1, входные усилители 2, устройство определения угла прихода сигналов 3, схему памяти сигналов 4, корректор частотной характеристики тракта 5, корректор фазовой характеристики тракта 6, усилитель мощности 7, гидроакустический излучатель 8, соединенные последовательно, и схему управления элементами корректоров частотной и фазовой характеристик, вход которой соединен с выходом схемы определения угла прихода сигналов, а выход по цепям управления соединен со входами схем корректоров частотной и фазовой характеристик.
На разнесенные в пространстве гидрофоны приемного устройства 1 поступают сигналы от гидролокатора, усиливаются входными усилителями 2 и далее поступают в устройство определения угла прихода сигнала 3 и в схему памяти 4. Из схемы памяти 4 сигналы поступают в корректоры частотной - 5 и фазовой - 6 характеристик. Далее в усилитель мощности 7 и на излучатель 8. При приеме сигнала гидролокатора и определении, одновременно, угла прихода сигнала в блоке 3 вырабатывается управляющий сигнал, поступающий в схему управления элементами корректоров частотной и фазовой характеристик 9, где осуществляется необходимая коммутация элементов корректоров 5 и 6. После окончания необходимых коммутаций в 9 производится воспроизведение эхо-сигнала из схемы памяти сигнала 4.
Примером реализации частотного корректора может служить мостовая схема на пассивных элементах, сопротивлениях и емкостях.
Примером реализации фазового корректора может служить схема минимально фазового корректора в виде R, C - активной цепи [В.П.Панкратов. Фазовые искажения и их компенсация. М., Изд. "Связь", 1974]. Схема управления может быть выполнена на электронных переключающих схемах или электромеханических реле. Реле или электронные ключи служат для коммутации сопротивлений и емкостей в корректорах по командам блока определения угла прихода сигнала.
Введение корректоров частотной и фазовой характеристик и схемы управления элементами корректоров выгодно отличает предлагаемый имитатор от прототипа, так как такое сочетание признаков дает возможность имитировать корреляционные характеристики эхо-сигналов в зависимости от угла отражения сигналов от цели и тем самым повысить достоверность имитации цели.
Изобретение может быть реализовано во вновь разрабатываемых средствах ГПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ ЭХО-СИГНАЛОВ | 1969 |
|
SU1840771A1 |
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ ТОЛЩИН ЛЕДОВОГО ПОКРОВА | 1973 |
|
SU1840741A1 |
| СПОСОБ ИМИТАЦИИ ПОДВОДНЫХ ЛОДОК ПРИ ПРОВЕДЕНИИ УЧЕНИЙ | 2021 |
|
RU2761937C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| ИМИТАТОР ПЕРВИЧНОГО И ВТОРИЧНОГО ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ДВИЖУЩЕЙСЯ ПОДВОДНОЙ ЦЕЛИ | 1970 |
|
SU1840763A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| ФАЗОВЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2012 |
|
RU2510045C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
Имитатор подводной лодки содержит последовательно соединенные приемо-усилительный тракт, устройство определения угла прихода сигналов, схему памяти, схему коррекции частотной характеристики и передающий тракт. Кроме того, в имитатор подводной лодки введена схема коррекции фазовой характеристики между схемой коррекции частотной характеристики и передающим трактом. А также схема управления, вход которой соединен с выходом устройства определения угла прихода сигнала, а выход соединен со входами схем коррекции фазовой и частотной характеристик. Технический результат - повышение достоверности имитации эхо-сигнала в зависимости от угла отражения сигналов от цели. 3 ил.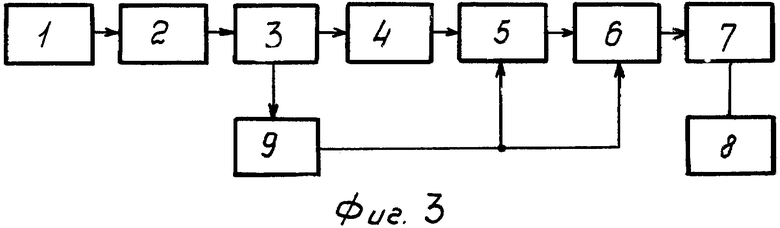
Имитатор подводной лодки, содержащий последовательно соединенные приемо-усилительный тракт, устройство определения угла прихода сигналов, схему памяти, схему коррекции частотной характеристики и передающий тракт, отличающийся тем, что, с целью повышения достоверности имитации эхо-сигнала в зависимости от угла отражения сигналов от цели, в него введена схема коррекции фазовой характеристики между схемой коррекции частотной характеристики и передающим трактом, а также схема управления, вход которой соединен с выходом устройства определения угла прихода сигнала, а выход соединен со входами схем коррекции фазовой и частотной характеристик.
| Патент США №3841485, кл.340-3К, опубл | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |

