Предлагаемый способ имитации эхо-сигнала может быть использован в имитаторах подводной лодки (как боевых, так и учебных).
Известные в настоящее время зарубежные и отечественные имитаторы подводной лодки (самоходные и дрейфующие) принимают, а затем после обработки излучают принятый ими сигнал гидролокационной станции без его деформации и без изменения структуры, хотя известны способы удлинения и изменения структуры излучаемого сигнала для увеличения достоверности его имитации.
Известно, что гидроакустический зондирующий импульс, отраженный от подводной лодки и принятый приемным трактом гидролокационной станции, существенно отличается от излученного по форме, структуре и длительности. Кроме того, при очень коротких импульсах, наряду с повышенной изрезанностью каждого из импульсов, форма эхо становится прерывистой за счет раздельного отражения от отдельных частей подводной лодки (нос, рубка, корма), при длинных же импульсах отдельные составные части эхо накладываются друг на друга. Изрезанность и увеличение длительности отраженного сигнала возрастают с увеличением отклонения угла облучения от траверзного.
Известен способ синтезирования отраженного зондирующего сигнала от статистически распределенных по поверхности подводной лодки отражателей с помощью задерживающих цепей.
Однако известный способ имитации (синтезирования), использованный в имитаторах МГ-44, МГ-54, МГ-64, не учитывает динамики изменения формы, структуры и длительности отраженного зондирующего сигнала, которые имеют место при взаимном маневрировании корабля-носителя гидролокационной станции и реальной подводной лодки.
В данной заявке предложен способ изменения структуры, формы, длительности и уровня имитируемого ("отраженного") эхо-сигнала в зависимости от угла облучения имитатора, в результате чего учитывается маневрирование корабля-носителя гидролокационной станции и имитируемой цели и, тем самым, повышается достоверность имитируемого сигнала. Одновременно с целью повышения достоверности имитации при облучении подводной лодки короткими импульсами, которые применяются для уточнения истинности цели, предложено разделение сформированных "n" сигналов случайной фазы на группы, имитирующие отражение от отдельных частей подводной лодки.
Блок-схема предлагаемого способа представлена на фиг.1.
Обработку принятого гидроакустического сигнала начинают с предварительного усиления этого сигнала (1) во входных цепях имитатора. Одновременно анализируют направление прихода зондирующего сигнала (2). Формируют "n" сигналов случайной фазы, сдвинутых во времени по случайному закону; затем сигналы группируют в несколько групп, имитирующих отражение от локальных отражателей подводной лодки, причем изменение величин сдвигов сигналов внутри групп и между группами производят по команде (3) блока управления. Сформированные "n" сигналов усиливают с коэффициентами усиления, также отличающимися друг от друга по случайному закону (4) в соответствии с командой блока управления. Производят суммирование сигналов (5) и усиление сигнала после суммирования (6). Управление величиной сдвига каждого из "n" сигналов в группе по времени, групп между собой, а также изменение коэффициентов усиления осуществляют в зависимости от угла прихода зондирующего сигнала (7).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР ГИДРОАКУСТИЧЕСКОГО ЭХО-СИГНАЛА | 1978 |
|
SU1840862A1 |
| СПОСОБ ИМИТАЦИИ ПОДВОДНЫХ ЛОДОК ПРИ ПРОВЕДЕНИИ УЧЕНИЙ | 2021 |
|
RU2761937C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| ИМИТАТОР ПЕРВИЧНОГО И ВТОРИЧНОГО ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ДВИЖУЩЕЙСЯ ПОДВОДНОЙ ЦЕЛИ | 1970 |
|
SU1840763A1 |
| КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2770388C1 |
| ИМИТАТОР ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1971 |
|
SU1840727A1 |
| Способ имитации присутствия подвижного подводного аппарата | 2016 |
|
RU2616321C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| ИМИТАТОР ПОДВОДНОЙ ЛОДКИ | 1975 |
|
SU1840676A1 |
Изобретение относится к области радиотехники и может быть использовано в имитаторах подводной лодки. Техническим результатом является повышение достоверности излучаемого имитируемого сигнала. Технический результат достигается за счет того, что в способе, основанном на приеме зондирующего сигнала и преобразовании его при помощи линии задержки, в ряд сдвинутых по времени «n» сигналов, усилении и суммировании величин сигналов и излучении имитируемого эхо-сигнала, из полученных «n» сигналов, после преобразования принимаемого зондирующего сигнала, формируют группы со случайными фазовыми и амплитудными распределениями соответственно величине отраженного сигнала от определенной части поверхности подводной лодки. Величины сдвига фаз сигналов внутри групп, временные сдвиги групп между собой и величину усиления сигналов изменяют в зависимости от угла прихода зондирующего сигнала. 1 ил.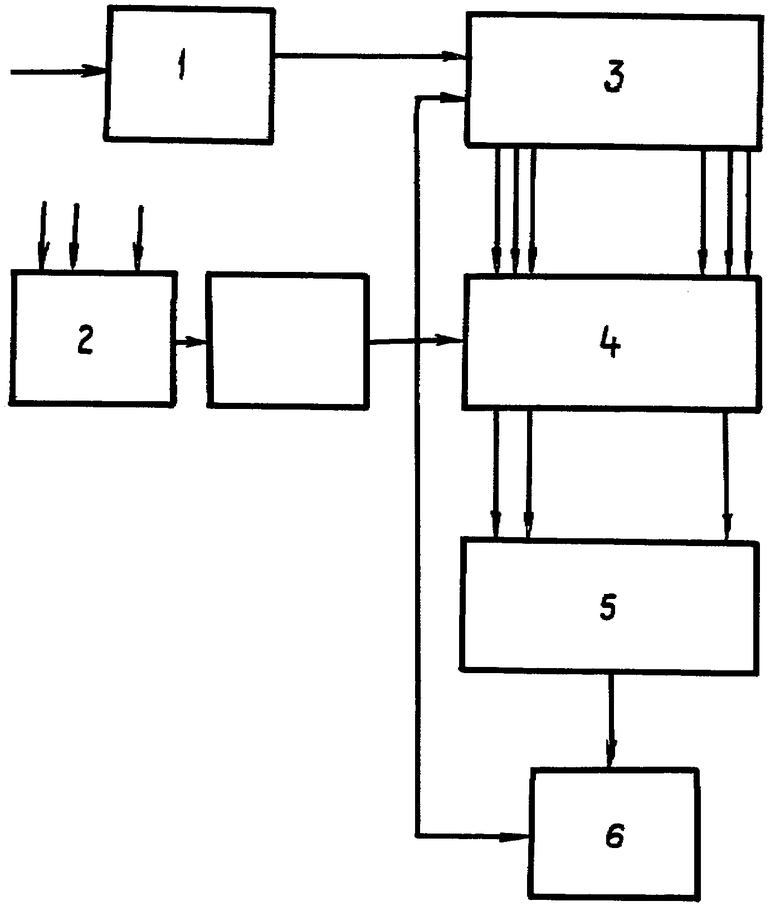
Способ имитации эхо-сигналов, отраженных от подводного объекта, основанный на приеме зондирующего сигнала и преобразовании его, например, при помощи линий задержки, в ряд сдвинутых по времени «n» сигналов, усилении и суммировании величин сигналов и излучении имитируемого эхо-сигнала, отличающийся тем, что, с целью повышения достоверности излучаемого имитируемого сигнала, из полученных "n" сигналов, после преобразования принимаемого зондирующего сигнала, формируют группы со случайными фазовыми и амплитудными распределениями, соответственно величине отраженного сигнала от определенной части поверхности подводной лодки, при этом величины сдвига фаз сигналов внутри групп, временные сдвиги групп между собой и величину усиления сигналов изменяют в зависимости от угла прихода зондирующего сигнала.

