Предлагаемое изобретение относится к системам, использующим электромагнитные волны иные, чем радиоволны, и может быть использовано для получения топографической информации и обнаружения препятствий в системах автоматического или полуавтоматического управления движением транспортного средства при исследовании планет, в системах управления движением в условиях отсутствия видимости.
Известны устройства для получения координат рельефа, описанные в патентах (см. "Справку об исследовании заявляемого объекта изобретения по патентной и научно-технической литературе" пп.3; 2.2. Далее именуется "Справка"). Устройства, содержащие импульсный оптический квантовый генератор (ОКГ), блок запуска ОКГ, импульсный генератор, устройство формирования диаграммы излучения ОКГ, сканирующее устройство, фотоприемник, таймер, индикатор, размещаются на носителе, перемещающемся над обозреваемой поверхностью, например на самолете или вертолете. При этом по исследуемой поверхности сканирует лопаточный или веерообразный луч ОКГ, который формируется устройством формирования диаграммы излучения ОКГ. Излученные импульсы ОКГ малой длительности отражаются от поверхности и поступают на фотоприемник в различные моменты времени в зависимости от относительных высот. Таким образом, фотоприемник последовательно собирает отраженные импульсы излучения от каждой высоты, что позволяет воспроизвести полученную информацию на индикаторе в виде контурной карты или в ином виде. Однако с помощью данного устройства невозможно получать топографическую информацию с высокой точностью при движении носителя со сканирующим устройством непосредственно по исследуемой поверхности при малой высоте его размещения. Кроме того, использование импульсных ОКГ и принцип построения схемы не дает возможности получать координаты с высокой точностью.
В патенте (см. "Справку" пп.2.3) описано устройство для получения координат рельефа дна водоемов, содержащее импульсный ОКГ, формирователь диаграммы излучения, фотоприемник, гироскопическую платформу, индикатор или регистратор. Устройство, размещенное на вертолете, перемещается над водоемом, при этом в качестве опорного (нулевого) уровня используется поверхность воды, так как от поверхности воды отражается поляризованное излучение. От диффузно отражающей поверхности дна отражается деполяризованное излучение. Оба импульса принимаются фотоприемником. Время между принятым поляризованным импульсом излучения и деполяризованным соответствует непосредственно глубине водоема и не зависит от изменения высоты полета. Кроме того, устройство располагается на гироплатформе, которая поддерживает вертикальную ориентацию луча. Недостатками данного устройства является то, что устройство получает только профили по линии пролета, необходим нулевой уровень типа поверхности воды и недостаточна точность измерения.
В патенте (см. "Справку" пп.2.4) описано устройство определения профиля диффузно отражающей поверхности, содержащее непрерывный ОКГ, фотоприемник, сканер, электронный блок. Устройство работает следующим образом. Излучение ОКГ направляется сканером под определенным углом на исследуемую поверхность. Фотоприемник определяет оптимальный угол приема, а электронный блок определяет координаты точек поверхности по углу излучения и углу приема отраженного излучения. Однако данное устройство имеет большое время измерения координат, а при измерении больших расстояний требуется большая база между источником излучения и фотоприемником, что сложно с точки зрения конструктивного исполнения.
В патентах (см. "Справку" пп.2.6; 2.5; 2.7; 2.8) описаны устройства для обнаружения положительных препятствий типа камня, холма, другого транспортного средства. Устройства содержат импульсный ОКГ, формирователь диаграммы излучения, фотоприемник, таймер, исполнительное устройство. Данные устройства измеряют расстояния только до положительных препятствий и только в заданном направлении и не могут определять препятствия типа рвов и кратеров.
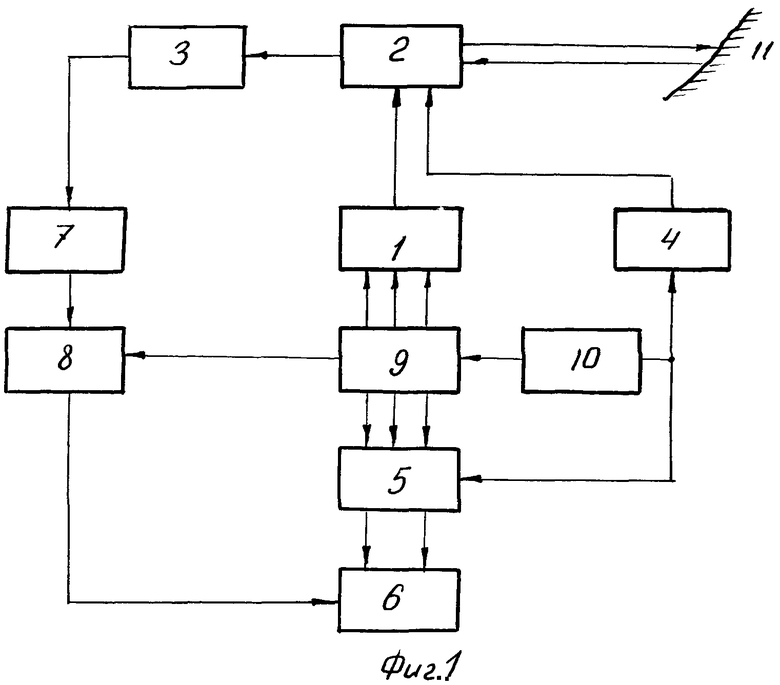
Из известных устройств наиболее близким по признакам и технической сущности к предлагаемому изобретению является устройство для получения координат рельефа местности непосредственно перед движущимся объектом, описанное в патенте США №3781111 "Лазерный детектор препятствий ближнего действия", опубликованный 25 декабря 1973 г. (см. "Справку" пп.2.1). Структурная схема устройства приведена на фиг.1, где
1 - оптический квантовый генератор (ОКГ)
2 - сканер
3 - фотоприемник
4 - блок управления сканером
5 - датчик углового положения луча ОКГ
6 - блок обработки текущих локальных координат рельефа
7 - пороговый детектор
8 - измеритель наклонной дальности
9 - блок запуска ОКГ
10 - синхронизатор
11 - рельеф местности.
Устройство содержит ОКГ 1, конструктивно выполненный в виде пяти излучателей, состыкованных со сканером 2, который механически связан с блоком управления сканером 4. Выход синхронизатора 10 связан с блоком запуска ОКГ 9, с датчиком углового положения луча ОКГ 5 и с блоком управления сканером 4. Устройство также содержит последовательно соединенные фотоприемник 3, оптически состыкованный со сканером 2, пороговый детектор 7, измеритель наклонной дальности 8, опорный вход которого соединен с блоком запуска ОКГ 9, и блок обработки текущих локальных координат рельефа 6, входы угловых координат которого соединены с датчиком углового положения луча ОКГ 5.
Устройство работает следующим образом. Блок запуска ОКГ 9 запускает один из пяти излучателей ОКГ 1, расположенных в горизонтальной плоскости перед сканером 2 таким образом, что каждый из них имеет свое азимутальное направление относительно оси симметрии носителя, излучение которого направляется сканером 2 на исследуемую поверхность 11. Сканер 2 осуществляет сканирование луча излучателя ОКГ 1 по углу места. Управляет сканером 2 блок управления сканером 4, работа которого синхронизатором 10 синхронизируется с работой блока запуска ОКГ 9 и с датчиком углового положения луча ОКГ 5. Таким образом, при заданном азимуте, который определяется работающим излучателем ОКГ 1, и при различных углах места, которые определяются в соответствии с углом поворота сканера 2, излучатель ОКГ 1 излучает импульсы в направлении исследуемой поверхности 11. Излученные импульсы принимаются фотоприемником 3, детектируются, усиливаются и поступают на пороговый детектор 7, с которого импульсы подаются на измеритель наклонной дальности 8. Измеритель наклонной дальности 8 фиксирует время между передним фронтом излученного импульса и передним фронтом принятого фотоприемником 3 импульса, измеряя таким образом расстояние между сканером 2, расположенным на мачте, и точкой встречи импульса с исследуемой поверхностью 11. Во время следующего цикла сканирования сканера 2 по углу места работает следующий излучатель ОКГ 1, которому соответствует другой азимут. Общий цикл измерений при сканировании сканера 2 по углу места и переключении работающих излучателей ОКГ 1 происходит до тех пор, пока не отработают все пять излучателей, работающих на заданные направления по азимуту. После того, как отработает последний излучатель ОКГ 1, процесс обзора закончен. Информация о наклонной дальности с блока измерения наклонной дальности 8 при различных азимутах и углах места и соответствующие ей азимут и угол места с датчика углового положения луча ОКГ 5 поступают на блок обработки текущих локальных координат рельефа 6, трехмерная информация с которого может быть использована для системы автоматического управления движением носителя.
Недостатком данного устройства является низкая точность измерения координат рельефа и узкий сектор обзора исследуемого пространства относительно носителя. Низкая точность измерения координат рельефа объясняется следующими факторами. Во-первых, измерение наклонной дальности, которая представляет собой расстояние между сканером устройства, расположенного на некотором возвышении над платформой носителя, и точкой встречи луча ОКГ с исследуемой поверхностью, осуществляется импульсными излучателями, которые не могут дать высокой точности измерения координат рельефа, так как необходимо формирование фронта излученного импульса менее 0,1 нс и такая же точность измерения времени между фронтами излученного и принятого импульсов, что сложно в техническом исполнении. Во-вторых, измерение наклонной дальности проводится при фиксированных азимутах. Это приводит к тому, что поперечное расстояние между точками, до которых измеряется наклонная дальность, велико, например, на расстоянии 10 м от носителя равно 85 см. В результате чего могут быть пропущены непроходимые препятствия. Не учитывается также перемещение луча ОКГ относительно платформы носителя из-за изменения его пространственной ориентации при наезде на проходимые препятствия в процессе сканирования и обзора заданного сектора исследуемой поверхности, также не учитывается перемещение носителя в процессе сканирования всего сектора обзора, что вносит дополнительную погрешность в измерение координат рельефа местности. Малый сектор обзора по азимуту сужает возможности системы управления движением при необходимости объезда препятствий в заданном направлении движения и выработке оптимальной трассы. При согласовании данного устройства с системой управления движением требуется ввод большого количества информации в единицу времени, предъявляются повышенные требования к объему оперативной памяти бортовой ЭВМ и скорости обработки получаемой информации.
Целью настоящего изобретения является увеличение точности измерения координат рельефа при расширении сектора обзора, а также увеличение вероятности безаварийного движения при автоматическом управлении и увеличение возможности выбора оптимальной трассы движения при уменьшении требований к бортовой ЭВМ, т.е. уменьшении объема оперативной памяти, скорости ввода и обработки получаемой топографической информации.
Для достижения поставленной цели лазерное устройство определения координат рельефа местности с подвижного носителя, кроме оптического квантового генератора (ОКГ), фотоприемника, сканера и последовательно соединенных блока управления сканером, управляющий выход которого подключен к управляющему входу сканера, датчика углового положения луча ОКГ и блока обработки текущих локальных координат рельефа, содержит последовательно соединенные генератор масштабной сетки, блок установки нулевого уровня рельефа и измеритель градиента наклонной дальности, второй вход которого подключен к выходу фотоприемника, а выход - ко входу блока обработки текущих локальных координат рельефа, модулятор, оптический вход которого подключен к выходу ОКГ, а сигнальный вход - к выходу генератора масштабной сетки, а выход - к оптическому входу сканера, опорный генератор, выход которого подключен одновременно ко второму входу блока установки нулевого уровня рельефа и ко второму входу фотоприемника, последовательно соединенные блок определения смещения луча по вертикали и блок определения вертикальной составляющей начала локальной системы координат, последовательно соединенные блок определения смещения луча в продольном направлении и блок определения продольной составляющей начала локальной системы координат, последовательно соединенные блок определения смещения луча в поперечном направлении и блок определения поперечной составляющей начала локальной системы координат, последовательно соединенные датчик пройденного пути и измеритель текущих координат носителя, первый выход которого подключен ко второму входу блока определения вертикальной составляющей начала локальной системы координат, второй выход - ко второму входу блока определения продольной составляющей начала локальной системы координат, третий выход - ко второму входу блока определения поперечной составляющей начала локальной системы координат, блок пространственной стабилизации луча, датчик углов крена, дифферента и рыскания носителя, причем выход крена которого подключен одновременно к первым входам, а выход дифферента - одновременно ко вторым входам блоков определения смещения луча по вертикали, определения смещения луча в продольном направлении, определения смещения луча в поперечном направлении, пространственной стабилизации луча, выход дифферента подключен также ко второму входу измерителя текущих координат носителя, выход рыскания подключен одновременно к третьим входам блоков определения смещения луча в продольном направлении, определения смещения луча в поперечном направлении и измерителя текущих координат носителя, а также последовательно соединенные блок азимутальной привязки текущих локальных координат рельефа, первый и второй входы которого подключены к выходу блока обработки текущих локальных координат рельефа, а третий - к выходу рыскания датчика углов крена, дифферента и рыскания носителя, блок формирования координат рельефа и блок памяти координат рельефа, причем третий вход блока формирования координат рельефа подключен к третьему выходу блока обработки текущих локальных координат рельефа, четвертый - к выходу блока определения вертикальной составляющей начала локальной системы координат, пятый - к выходу блока определения продольной составляющей начала локальной системы координат, шестой - к выходу блока определения поперечной составляющей начала локальной системы координат. Несущая способность грунта, его структура и гранулометрический состав являются причиной низкой проходимости и большого тормозного пути луноходов. В связи с этим автоматические системы управления движением лунохода для обеспечения безаварийного движения должны определять координаты рельефа на расстоянии 10-15 м с высокой точностью (определяя уклоны в 30° и препятствия, размеры которых порядка 20 см). С этой целью луч ОКГ, работающего в режиме непрерывного излучения, посредством сканера непрерывно сканирует по азимутальной строке в широком угле, обеспечивая большой сектор обзора и расширяя возможности маневрирования при объезде препятствий и выборе оптимальной траектории движения. Сканирование луча происходит относительно продольной оси симметрии носителя при заданном угле места, который блоком пространственной стабилизации поддерживается постоянным, по образующей конуса с вершиной в оптическом центре сканера, являющейся началом локальной системы координат. Таким образом, начало локальной системы координат жестко привязано к носителю, причем ось Х совпадает по направлению с продольной осью симметрии носителя, т.е. с направлением движения, ось Y - с поперечной осью симметрии носителя, ось Z совпадает по направлению с геодезической вертикалью. В результате чего получение координат рельефа с высокой точностью в локальной системе координат и учет перемещений начала локальной системы координат относительно рельефа дает возможность получить координаты рельефа местности с высокой точностью в неподвижной маршрутной системе координат, связанной с рельефом местности. Для увеличения точности получения координат рельефа местности в локальной системе координат излучение ОКГ, работающего в непрерывном режиме и имеющего узкую диаграмму направленности, модулируется по интенсивности. Частота модуляции соответствует частоте генератора масштабной сетки, длина волны которого выбирается для обеспечения высокой точности измерения градиента наклонной дальности относительно принятого нулевого уровня рельефа, который устанавливается блоком установки нулевого уровня рельефа и опорным генератором. Блок азимутальной привязки учитывает угол между заданным направлением движения (т.е. продольной осью неподвижной маршрутной системы координат) и мгновенным направлением движения носителя, вводя данные поправки в продольные и поперечные координаты текущей информации. Предлагаемое устройство работает во время движения носителя, который изменяет свою пространственную ориентацию и положение относительно неподвижной маршрутной системы координат, связанной с местностью, при объезде непроходимых препятствий и наезде на проходимые. Измеритель текущих координат носителя за счет учета мгновенных значений углов крена, дифферента и криволинейного пути, пройденного носителем, который измеряется датчиком пройденного пути, определяет текущие координаты носителя в неподвижной маршрутной системе координат. Следует учитывать также, что предлагаемое устройство располагается на некотором возвышении над платформой носителя (на высоте 5-7 м) для того, чтобы устройство детектировало как положительные, так и отрицательные препятствия типа рвов, ям, кратеров. Это приводит к тому, что происходит смещение луча ОКГ, т.е. смещение начала локальной системы координат относительно платформы. Данные перемещения учитываются блоками определения смещения луча ОКГ по вертикали, в продольном и поперечном направлениях за счет учета высоты размещения сканера и пространственной ориентации носителя. Таким образом, блоки определения вертикальной, продольной и поперечной составляющих начала локальной системы координат определяют соответственно координаты начала локальной системы, относительно которого измеряются локальные координаты, в неподвижной маршрутной системе с учетом движения носителя и смещения луча относительно платформы носителя. В итоге блок формирования координат рельефа выдает в блок памяти координаты рельефа при движении носителя с высокой точностью при широком секторе обзора в неподвижной относительно рельефа местности маршрутной системе координат, причем продольная ось направлена из начальной точки в заданную точку движения или в заданном направлении движения носителя, а вертикальная совпадает по направлению с геодезической вертикалью. При этом не требуется ввода большого количества информации в единицу времени в систему управления движением с высокой скоростью ввода и обработки данной информации, что значительно уменьшает объем памяти бортовой ЭВМ.
Структурная схема лазерного устройства определения координат рельефа местности с подвижного носителя представлена на фиг.2, где
1 - оптический квантовый генератор (ОКГ)
2 - сканер
3 - фотоприемник
4 - блок управления сканером
5 - датчик углового положения луча ОКГ
6 - блок обработки текущих локальных координат рельефа
11 - рельеф местности
12 - модулятор
13 - опорный генератор
14 - генератор масштабной сетки
15 - блок установки нулевого уровня рельефа
16 - измеритель градиента наклонной дальности
17 - блок азимутальной привязки текущих локальных координат рельефа
18 - блок формирования координат рельефа
19 - блок памяти координат рельефа
20 - блок определения вертикальной составляющей начала локальной системы координат
21 - блок определения продольной составлявшей начала локальной системы координат
22 - блок определения поперечной составляющей начала локальной системы координат
23 - блок определения смещения луча по вертикали
24 - блок определения смещения луча в продольном направлении
25 - блок определения смещения луча в поперечном направлении
26 - датчик углов крена, дифферента и рыскания носителя
27 - измеритель текущих координат носителя
28 - датчик пройденного пути носителем
29 - блок пространственной стабилизации луча.
Оптический вход модулятора 12, сигнальный вход которого подсоединен к генератору масштабной сетки 14, состыкован с оптическим квантовым генератором (ОКГ) 1, а оптический выход модулятора 12 - со сканером 2. Сканер 2 связан с блоком управления сканером 4, выход которого соединен с датчиком углового положения луча ОКГ 5, выход которого в свою очередь соединен с угловыми входами блока обработки текущих локальных координат рельефа 6. Выход опорного генератора 13 подсоединен ко второму входу фотоприемника 13 и ко второму входу блока установки нулевого уровня рельефа 15, первый вход которого соединен с генератором масштабной сетки 14. Выход блока установки нулевого уровня рельефа 15 соединен с первым входом измерителя градиента наклонной дальности 16, второй вход которого соединен с фотоприемником 3, оптически состыкованным со сканером 2. Выход измерителя градиента наклонной дальности 16 подключен к блоку обработки текущих локальных координат рельефа 6, третий выход которого соединен с третьим входом блока формирования координат рельефа 18, а первый и второй входы - к соответствующим входам блока азимутальной привязки текущих локальных координат рельефа 16. Выходы крена, дифферента и рыскания датчика крена, дифферента и рыскания носителя 26 соответственно подсоединены и к блоку определения смещения луча в продольном направлении 24, выход которого соединен с блоком определения продольной составляющей начала локальной системы координат 21, и к блоку определения смещения луча в поперечном направлении 25, выход которого соединен с блоком определения поперечной составляющей начала локальной системы координат 22. Выход крена и дифферента датчика крена, дифферента и рыскания носителя 26 подсоединен также к блоку пространственной стабилизации луча 29 и к блоку определения смещения луча по вертикали 23, выход которого подсоединен к блоку определения вертикальной составляющей начала локальной системы координат 20. Выход рыскания датчика крена, дифферента и рыскания носителя 26 подсоединен к блоку азимутальной привязки текущих локальных координат рельефа 17, а выход рыскания и дифферента также подсоединен соответственно к измерителю текущих локальных координат носителя 27, первый вход которого соединен с датчиком пройденного пути носителя 28. Первый выход измерителя координат носителя 27 соединен с блоком определения вертикальной составляющей начала локальной системы координат 20, выход которого соединен с четвертым входом блока формирования координат рельефа 18, второй выход - с блоком определения продольной составляющей начала локальной системы координат 21, выход которого соединен с пятым входом блока формирования координат рельефа 18, третий выход - с блоком определения поперечной составляющей начала локальной системы координат 22, выход которого соединен с шестым входом блока формирования координат рельефа 18. Выходы блока формирования координат рельефа 18 соответственно соединены со входами блока памяти координат рельефа 19.
Предлагаемое устройство работает следующим образом. Непрерывное излучение ОКГ 1 модулируется по интенсивности модулятором 12 с частотой генератора масштабной сетки 14. Промодулированный луч ОКГ 1 за счет сканирования сканера 2, приводимого в действие блоком управления сканером 4, сканирует совместно с мгновенным полем зрения фотоприемника 3 по исследуемой поверхности 11. Сканирование луча происходит при постоянном угле места по азимуту относительно продольной оси симметрии носителя по образующей конуса с вершиной в оптическом центре сканера 2, являющейся началом локальной системы координат. Угол места сканирующего луча поддерживается постоянным за счет того, что блок пространственной стабилизации луча 29, отслеживая крен и дифферент с датчика углов крена, дифферента и рыскания носителя 26, вырабатывает сигнал рассогласования и поддерживает постоянной пространственную ориентацию в вертикальном направлении гирорамы, на которой расположены сканер 2 и приемопередающая часть устройства. Излучение, отраженное от исследуемой поверхности сканером 2, направляется на фотоприемник 3, на внешний электрод которого с опорного генератора 13 подается высокочастотное напряжение. Принимаемый оптический сигнал фотоприемником 3 детектируется, усиливается и гетеродинируется. В результате этого фазовый набег, соответствующий изменению наклонной дальности относительно нулевого уровня, переносится в область низких частот. С выхода фотоприемника 3 низкочастотный сигнал подается на измеритель градиента наклонной дальности 16, на другой вход которого с блока установки нулевого уровня рельефа 15 подается низкочастотный сигнал с фазой, пропорциональной выбранному нулевому уровню местности, относительно которого измеряются возвышения или впадины. Блок установки нулевого уровня рельефа 15 вырабатывает низкочастотное напряжение с фазой, соответствующей нулевому уровню рельефа, путем смешения высокочастотных напряжений, которые соответственно поступают с опорного генератора 13 и генератора масштабной сетки 14. С выхода измерителя градиента наклонной дальности 16 сигнал, величина и полярность которого указывают на величину и характер препятствий, поступает на блок обработки текущих локальных координат рельефа 6, на угловые входы которого с датчика углового положения луча ОКГ 5, механически связанного с блоком управления сканером 4, поступают сигналы азимута и угла места. С блока обработки текущих локальных координат рельефа 6 координата Z подается на блок формирования координат рельефа 18. Координаты X и Y подаются на блок азимутальной привязки текущих локальных координат рельефа 17, на который также поступает сигнал рыскания носителя, т.е. сигнал мгновенного направления движения носителя, с датчика углов крена, дифферента и рыскания носителя 26. В результате этого с выхода данного блока координаты Х и Y, которые подаются на блок формирования координат рельефа 18, переводятся в систему координат, начало которой связано с оптическим центром сканера, а оси Х и Y параллельны соответствующим осям неподвижной маршрутной системы координат. С датчика пройденного пути носителем 28, который может быть выполнен в виде мерного колеса, величина криволинейного пути, пройденного носителем, подается на измеритель текущих координат носителя 27, на второй и третий входы которого с датчика углов крена, дифферента и рыскания носителя 26 подаются сигналы дифферента и рыскания. С выхода измерителя текущих координат носителя 27 на блок определения вертикальной составляющей начала локальной системы координат 20, поступает текущая координата Z носителя, получаемая в неподвижной маршрутной системе координат. На блок определения продольной составляющей начала локальной системы координат 21 поступает текущая координата X носителя, на блок определения поперечной составляющей начала локальной системы координат 22 поступает текущая координата Y носителя. С датчика углов крена, дифферента и рыскания носителя 26 углы крена и дифферента поступают на блок определения смещения луча по вертикали 23, с выхода которого на блок определения вертикальной составляющей начала локальной системы координат 26 подается сигнал, величина которого пропорциональна смещению оптического центра сканера 2, т.е. начала локальной системы координат, относительно платформы носителя. Углы крена, дифферента и рыскания носителя подаются также на блок определения смещения луча в продольном направлении 24 и на блок определения смещения луча в поперечном направлении 25, с которых подаются напряжения, пропорциональные смещениям в продольном и поперечном направлениях соответственно на блок определения продольной составляющей начала локальной системы координат 21 и блок определения поперечной составляющей начала локальной системы координат 22. С выхода блока определения вертикальной составляющей начала локальной системы координат 20, блока определения продольной составляющей начала локальной системы координат 21 и блока определения поперечной составляющей начала локальной системы координат 22 на соответствующие каналы блока формирования координат рельефа 18 подаются сигналы, величина которых пропорциональна координатам начала локальной системы координат в неподвижной маршрутной системе координат, в которой они суммируются с координатами рельефа в локальной системе координат. С выхода блока формирования координат рельефа 18 на блок памяти координат рельефа 19 подаются координаты рельефа в неподвижной маршрутной системе координат, продольная ось которой направлена из начальной точки движения в заданную точку, а вертикальная совпадает по направлению с геодезической вертикалью.
Предлагаемое устройство по сравнению с прототипом позволяет в 5-10 раз увеличивать точность измерения координат рельефа при увеличении сектора обзора в 2-3 раза. Таким образом, устройство дает возможность получить координаты рельефа местности с высокой точностью в неподвижной маршрутной системе координат, жестко связанной с рельефом местности, что обеспечивает надежное обнаружение препятствий, размеры которых порядка 5-10 см на расстоянии 15 м при ширине сектора обзора 10-15 м. Большая ширина сектора обзора увеличивает вероятность безаварийного движения при автоматическом управлении и увеличивает возможности выбора оптимальной трассы движения транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Способ и устройство управления полетом группы летательных аппаратов | 2022 |
|
RU2786276C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
Лазерное устройство для определения координат рельефа местности с подвижного носителя содержит оптический квантовый генератор (ОКГ), последовательно соединенные сканер и фотоприемник, последовательно соединенные датчик углового положения луча ОКГ и блок обработки текущих локальных координат рельефа местности. В устройство дополнительно введены последовательно соединенные опорный генератор, блок установки нулевого уровня рельефа местности. Кроме того, измеритель градиента наклонной дальности, последовательно соединенные блок азимутальной привязки, блок формирования координат и блок памяти, последовательно соединенные датчик пройденного пути носителя, измеритель текущих координат носителя и блок определения начала локальной системы координат, последовательно соединенные датчик углов и блок определения составляющих смещения луча ОКГ. А также введены модулятор, блок управления сканером, генератор масштабной сетки и блок пространственной стабилизации луча ОКГ. При этом выход опорного генератора дополнительно подключен ко входу фотоприемника. Выход генератора масштабной сетки соединен с другим входом блока установки нулевого уровня рельефа местности и с одним из входов модулятора, вход и выход которого подключены соответственно к выходу ОКГ и ко входу сканера, другой вход которого подключен к одному из выходов блока управления сканером. Выходы блока определения составляющих смещения луча ОКГ через блок определения составляющих начала локальной системы координат подключены к другим входам блока формирования координат, а выходы датчика углов подключены ко входам блока пространственной стабилизации луча ОКГ. Технический результат - повышение точности измерения координат рельефа местности при расширении поля обзора. 2 ил.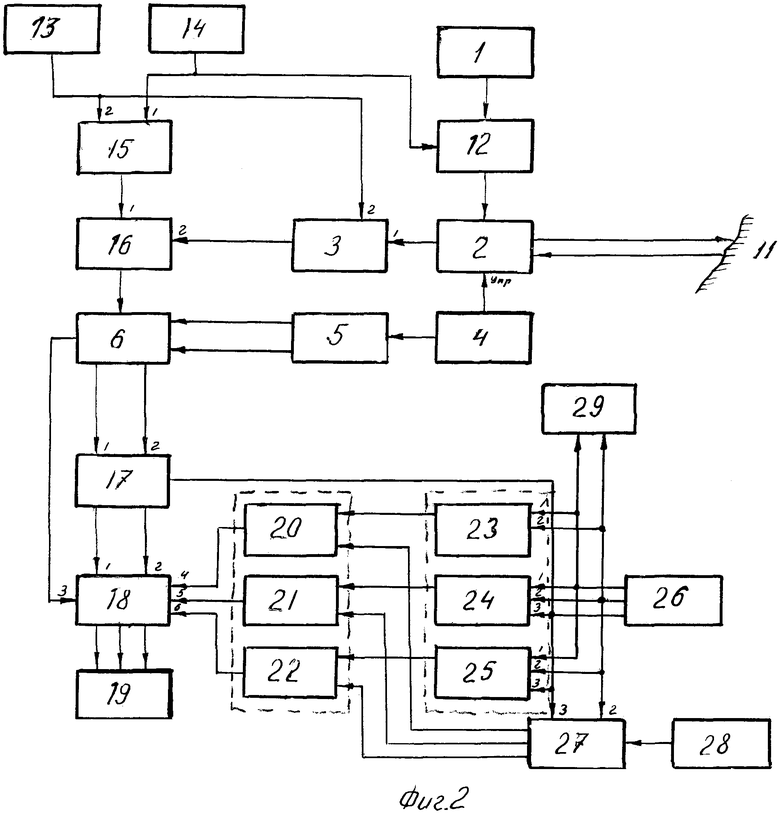
Лазерное устройство для определения координат рельефа местности с подвижного носителя, содержащее оптический квантовый генератор (ОКГ), последовательно соединенные сканер и фотоприемник, последовательно соединенные датчик углового положения луча ОКГ и блок обработки текущих локальных координат рельефа местности, отличающееся тем, что, с целью повышения точности измерения координат рельефа местности при расширении поля обзора, в него введены последовательно соединенные опорный генератор, блок установки нулевого уровня рельефа местности, измеритель градиента наклонной дальности, последовательно соединенные блок азимутальной привязки, блок формирования координат и блок памяти, последовательно соединенные датчик пройденного пути носителя, измеритель текущих координат носителя и блок определения начала локальной системы координат, последовательно соединенные датчик углов и блок определения составляющих смещения луча ОКГ, а также введены модулятор, блок управления сканером, генератор масштабной сетки и блок пространственной стабилизации луча ОКГ, при этом выход опорного генератора дополнительно подключен ко входу фотоприемника, выход генератора масштабной сетки соединен с другим входом блока установки нулевого уровня рельефа местности и с одним из входов модулятора, вход и выход которого подключены соответственно к выходу ОКГ и ко входу сканера, другой вход которого подключен к одному из выходов блока управления сканером, другой выход которого соединен со входом датчика углового положения луча ОКГ, выходы блока обработки текущих локальных координат рельефа местности подключены к другому входу блока формирования координат и ко входу блока азимутальной привязки, другой выход которого соединен с соответствующими входами блока определения составляющих смещения луча ОКГ и с другим входом измерителя текущих координат носителя, выходы блока определения составляющих смещения луча ОКГ через блок определения составляющих начала локальной системы координат подключены к другим входам блока формирования координат, а выходы датчика углов подключены ко входам блока пространственной стабилизации луча ОКГ.
| Регенеративный теплообменник | 1986 |
|
SU1339358A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США №3781111, класс G01С 3/08, опубл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |

