импульсов соединены соответственно с третьими входг1ми первого и второго синхронизаторов, четвертые входал которых являются соответственно вторым и третьим входами вычислителя, второй и третий входы коммутатора являются четвертым и пятым входами вычислителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ранговый обнаружитель сигналов | 1981 |
|
SU970291A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| Бортовая радиолокационная станция | 2016 |
|
RU2609156C1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Бортовая радиолокационная станция | 2019 |
|
RU2719547C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ | 1988 |
|
SU1841091A1 |

1. УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМАТИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА С ПРЕПЯТСТВИЯМИ, содержащее первый датчик рас- стояний, оптически связанный с первым блоком сканирования, вычислитель, первый выход которого является выходом устройства, отличающееся тем, что, с целью повышения информативности устройства, в него введены три датчика расстояний, три блока сканирования, коммутатор, два датчика наклона, датчики хода колес (по числу колес транспортного средства), выходы которых соединены с первой группой входов коммутатора, выход которого соединен с первым входом вычислителя, второй выход которого соединен с входами первого и второго датчиков расстояний, третий выход вычислителя соединен с входами третьего и четвертого датчиков расстояний, выходы датчиков расстояний подключены к второй группе входов коммутатора, вход которого является входом устройства, выходы первого и второго блоков сканирования соединены с вторьтм входом вычислителя, выходы третьего и четвертого блоков сканирования соединены с третьим входом вычислителя , второй, третий и четвертый датчики расстояний оптически связаны с соответствующими блоками сканирования, выходы первого и второго датчиков наклона соединены соот ветственно с четвертым и пятым входами вычислителя.. ;. 2. Устройство ПОП.1, отличающееся тем, что вычислитель содержит компаратор, два функциональных преобразователя, п компа раторов (п - число колес транспортного средства), два формирователя импульсов, два синхронизатора, генератор частоты, селектор, коммутатор, выход которого соединен с первыми входами компаратора, первого и . второго функциональных преобраэоваГтелей7 п компараторов, выходы которых соединены с первым входом селек тора, выходы компаратора первого (Л и второго функциональных преобразователей соединены соответственно с вторым, третьим и четвертым входами селектора, выход которого является первым выходом вычислителя,- первый вход коммутатора объединен с первыми входами первых и вторых формироваэ телей импульсов и синхронизаторов, с входом генератора частоты и является з:) первым входом вычислителя, выход ND генератора частоты подключен к вторым входам первых и формиро i :д вателей импульсов и синхронизаторов, первые выходы синхронизаторов соединены соответственно с вторым и ю третьим входом коммутатора, второй выход первого синхронизатора соединен с вторыми входами компаратора, первого и второго функциональных пре бразователей, второй выход второго синхронизатора соединен с вторыми входами п компараторов, третьи вы- , ходы первого и ВТОРОГО синхронизаторов соединены с третьими входами первого и второго формирователей импульсов, первые выходы которых являются соответственно вторым и третьим выходами вычислителя, вторые выжоды первого и второго формирователей
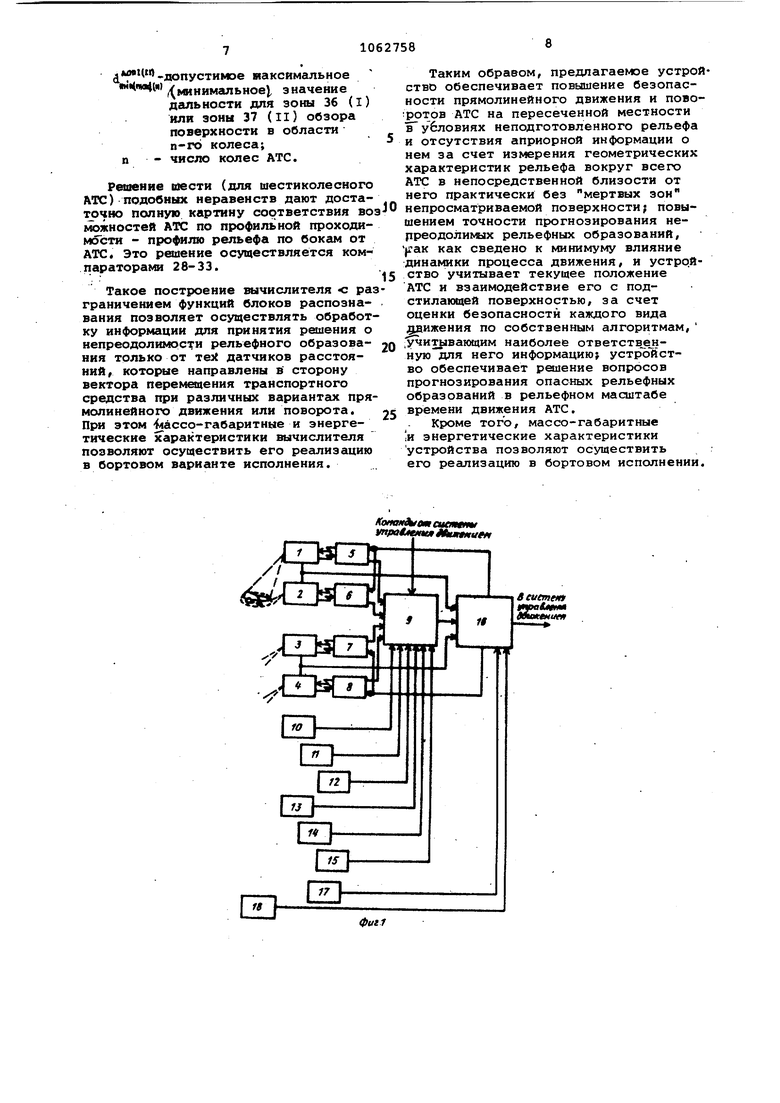
Изобретение относится к устройст вам, обеспечивающим безопасное движение автоматического транспор.тного средства (АТС) при его перемещении по сложной пересеченной местности. Это устройство обеспечивает защиту АТС от наезда на непреодолимые выступы (камни, бугры и т.п. локальные преграды) и впадины (трацины, , кратеры и т.п.), от потери устойчивости (опрокидывания при превы1аении допустимых углов крена и дифферента как при прямолинейном движении, так и при поворотах. Известно устройство, содержащее источник света и фотодиод, размещен ные на одном из внешних углов транс портного средства (ТС), связанное с исполнительным органом..Источник размещен в месте установки фотодиода, на остальных углах ТС имеются зеркала, защищенные гибким ограждением, расположенные с разворотом на 90° друг к другу для образования лучом замкнутого контура вокруг ТС 1 . Однако это устройство обеспечивает защиту ТС только от столкновений с положительными препятсвиями, т.е. камни, столбы, стенки и т.д., при этом устройство срабатывает либо при пересечении преградой луча, либо при утыкании ТС в преграду гиб ким ограждением зеркал. Однако оно не защищает ТС от наиболее опасных препятствий типа впс1дин , обрывов, трещин и т.п., которые могут привес ти его к полной потере подвижности либо гибели. - Наиболее близким к изобретению является лазерный детектор препятствий ближнего действия, состоящий из пятиканёшьного лазерного дальномера с устройством сканирования для измерения дальности до поверхности в пяти азимутальных направлениях перед АТС путем сканирования по угл возвышения и вычислительного блока, обрабатываяхцего получаемую от дёшьномера информацию и вырабатывающего сигналы предупреждения при обнаружении непреодолимых препятствий Г Эти .сигналы используются блоком управления движением для выр ботки команд исполнительним устройством привода движения. Однако известному устройству присущи следующие недостатки: наличие большой мертвой зоны, т.е. непррсматриваемого участка поверхности на продолжении колеи выходя14его изпод контроля сканирующего лазерного дальномера при движении АТС на дальностях менее б м; не гарантировано обнаружение препятствий типа ям, кратеров, трещин и т.п. в полосе движения в непосредственной близости перед АТС, вследствие наличия мертвой зоны, а обнаружение подобных препят ствий на больших дальностях невозможно из-за затеняющего влияния рельефа j не обеспечена безопасность АТС при разворотах и движении назад. Налример, формирювание представления & геометрических характеристиках поберхности в непосредственной близос-. ти перед АТС и вдоль бортов для обеспечения безопасности разворотов и заполнения с этой целью памяти вычислительного блока информацией о геометрии рельефа от сканирующего лазерного дальномера в полосе, превышающей полосу движения, потребует памяти, объем которой превосходит возможности существующих бортовых устройств; не может быть обеспечена высокая точность решения задачи из-за неучета динамики угловых перемещений и текущего положения АТС; не обеспечена безопасность АТС при движении поперек склонов, когда за счет поперечного сползания в сторону уклона, истинный курс движения близок к крайнему сканируемому азимутальному направлению, либо существенно превышает его. Эти недостатки объясняются малой информативностью устройства, в результате чего надежность обеспече:ния безопасности движения АТС невелика. Целью изобретения является повышение информативности устройства для, обеспечения безопасности движения и поворотов АТС при его движении по пересеченной местности в условиях отсутствия априорной информации о , рельефе. Поставленная цель достигается те что в устройство для предотвращения столкновения автоматического транспортного средства с препятствиями, содержеццее датчик расстояний, оптически связанный с блоком сканирования, вычислитель, первый выход которого является выходом устройства, введены три датчика расстояний три блока сканирования, коммутатор два датчика наклона, датчики хода колес (по числу колес транспортного средства), выходы которых соединены с первой группой входов коммутатора, выход которого соединен с первым входом вычислителя, второй выход которого соединен с входами первого и второго датчиков расстояния, третий выход вычислителя соединен с входами третьего и четверто го датчиков расстояний, выходы датчиков расстояний - к второй группе входов коммутатора, вход которого является входом устройства, выходы первого и второго блоков сканирования соединены с вторым входом вычислителя, выходы третьего и четвертого блоков сканирования соедине ны с третьим входом вычислителя,вто рой, третий и четвертый датчики рас стояний оптически связаны с соответствующими блоками сканирования, выходы первого и второго датчиков наклона соединены соответственно с четвертым и пятым входами вычислителя. Вычислитель содержит компаратор, два функциональных преобразователя, п компараторов (п - число колес транспортного средства) два формирователя импульсов, два синхронизатора, генератор частоты, селектор, коммутатор, выход которого сое динен с первыми входами компаратора первого и второго функциональных преобразователей, п компараторов, выходы которых соединены с пер вым входом селектора, выходы ксшпаратора, первого и второго функциональных преобразователей.соединены соответственно со вторым, третьим и четвертым входами селектора, выход которого является первым выходом вычислителя, первый вход коммутатора Объединен; с первыми входами первых и вторых формирователей импульсов и синхронизаторов, с входом генератора частоты, и является первым входом вычислителя выход генератора частоты подключен к вторьм входам первых и вторых формирователей импульсов и синхронизаторов, первые выходы синхронизаторов соединены соответственно с вторым и третьим входом коммутатора, второй выход первого синхронизатора -соеажнен со вторыми входами кс тарат ч а, первого и второго функциональных преобразователей, второй выход второго синхронизатора соединен со вторыми входами п компараторов,третьи выходы первого и второго синхронизаторов соединены с третьими входами первого и второго формирователей импульсов, первые выходы которых являются соответственно вторым и третьим выходами вычислителя, вторые выходы первого и второго формирователей импульсов соединены соответственно с третьими входами первого и второго синхронизаторов, четвертые входы которых являются соответственно вторым и третьим входами вычислителя, второй и третий входы коммутатора являются четвертым и пятым входами вычислителя. На фиг. 1 показана блок-схема устройства для предотвращения столкновения автоматического транспортного средства с препятствиями; на фиг. 2 - блок-схема вычислителя; на фиг. 3 - расположение на АТС датчиков расстояний и блоков сканирования, датчиков хода колес и зон обзора поверхности вокруг АТС. Устройство для предотвращения столкновений АТС с непреодолимыми рельефными образованиями состоит из , блоков 1 и 2 сканирования, расположенных впереди сзади АТС (фиг. 3), блоков 3 и 4 сканирования, расположенных по бортам АТС, датчиков 5-8 расстояний, например лазерных локаторов малых расстояний, оптически связанных с соответствующими блоками 1 - 4 сканирования и электрически связанных со входами коммутатора 9, датчиков 10-15 хода колес,связанных с вычислителем 16 через коммутатор 9, ко входам вычислителя 16 подключены также датчики 17 и 18 наклона, вычислитель включает в себя (фиг. 2) компаратор. 19, два функциональных преобразователя 20 и 21, коммутатор 22, синхронизатор 23, формирователь 24 импульсов, синхронизатор 25, формирователь 26 импульсов, генератор 27 частоты, компараторы 28-33, селектор 34. Структура вычислителя построена в соответствии с рассмотренными ниже задачами и алгоритмами обеспечения безопасности движения. Схемное постро ение определяется структурами используекых формальных описаний алгоритмов (формулы 1-4). Селектор 34 может быть выполнен, например, в виде набора рекурсивных фильтров, реализуемых на сдвиговых регистрах и логических элементгш, и предназначен для повышения достоверности принимаемых решений при случайшлх ошибочных измерениях датчиков и сбоев вычислителя 16.
Устройство при движении, наприме шестиколесного АТС по пересеченной местности работает следующим образо
В зависимости от вида выполняемого движения коммутатор 9 по командам, поступанадим от системы управЛенин движением, осуществляет под.ключение соответствующих комбинаций датчиков устройства на входы компартора 19 функциональных преобразователей 20 и 21, компараторов 28-33, и формирует необходимый для синхронзаторов 23 и 25 формирователей 24 и 26 импульсов вычислителя 16 сигнал. При этом подключаемая комбинация такова, что суммарная информация от них позволяет решать по заложенным в вычислителе 16 алгоритмам задачу обеспечения безопасности данного вида движения с наибольшей эффективностью. Измерение дальностей до поверхности датчиками 5--8 произ,водится только в том случае, если формирователи 24 и 26 импульсов выдают соответствуюи№1е команды запуск лазерньзх измерителей.
Например, по команде Вперед коммутатор 9 подключает к входам компаратора 19 и функциональных преобразователей 20 и 21, компараторов 28-33 датчик 5 расстояний, который осуществляет измерения дальности по командам, формируемым формирователем 24 импульсов. К вычислителю 16 подключаются также в случае использования описанных ниже алгоритмов обработки выходы датчиков 17 и 18 наклона и выходы датчиков 10-15 , колес АТС. Проходимость рельефа при данном виде движения оценивается по следующим фор мулам.
Для локальных препятствий
:i)
d
пор ,
п
d - измерения дальности до по- 45 верхности, выполненные датчиком 5 расстояний в зоне 35 обзора поверхности (фиг.З) dp - предельное допустимое (пороговое) значение дальности.50 до препятствий, высота (глубина) которого преодолима для ATCj оценка производится компаратором 19. Для прогнозируемого угла дифферен-сс
(У„р). .
(2)
пр п
- У° - У yp/L, Q
р
Vg - текущее значение угла дифферента от датчика 17; L - длина АТС (расстояние между осями передних и задних колес );
.координаты точек рельефа под передними колесами в сиетеме координат связанной с
АТС;
ТО же, для задних колес АТС; предельно допустимое для АТС
значение угла дифферента;
Ку - коэффициент, учитывающий воможный провис колес. Оценка и вычисления производятся функциональным преобразователем 20J Для прогнозируемого угла крена
(Упр)
(3)
Упр и АОП )
lfnp) (у°-у у -у;+у -ур/в
где У - текущее значение угла крена
от датчика 18; В. - ширина АТС;
.о
координаты точек рельефа
под средними колесами АТС в системе координат, связанной с АТС; Xion предельно допустимое для АТ
значение угла крена; Kj. - коэффициент, определяемый характеристикой подвески. I
Оценка и вычисления производятся функциональным преобразователем 21,
При невыполнении хотя бы одного из условий (1-3) по соответствующим сигналам от компаратора 19 и функциональных преобразователей 20 и 21 селектором 34 формируется сигнал для системы управления движением.
Датчики 7 и 8 осуществляют измерения и подключаются к вычислителю 16 через коммутатор 9 либо по команде Налево и Направо, либо при движении АТС по косогорам (т.е. с боковым креном при наличии потенциальной опасности поперечного скольжения машин), о чем устройство информируется датчиком 18. Безопасност поворотов и защита от опрокидывания прогнозируется по информации от боковых датчиков, по оценкам выполнения условий вида
fconi
Un, rna)t(n)A, on II
(4)
d.
d
Uh) mai. In)
де dr - i-e измерение дальности
в зоне 36 обзора поверхнос ти в области п-го колеса (областью колеса зоны обзора считаем измерения в 1/3 длины всей зоны сканирования, расположенной PJ напротив этого колеса) ; d - i-e измерение дальности в зоне 37 обзора поверхности в области п-го колеса; .«t(te .допустимое иаксймальное ««t-wJl /минимальное}, значение дальности для зоны 36 (1; или зоны 37 (II) обзора поверхности в области п-г6 колеса; п - чисдю колес АТС. Решение шести (для шестиколесного АТС) подобных неравенств дают достаточно полную картину соответствия во можностей АТС по профнльной проходимости - профилю рельефа по бокам от АТС. Это решение осуществляется компараторами 28-33. Такое построение вычислителя -с ра граничением функций блоков распознавания позволяет осуществлять обработ ку информации для принятия решения о непреодолимости рельефного образования только от тех датчиков расстояний, которые направлены в сторону вектора перемацения транспортного средства при различных вариантах пря молинейного движения или поворота. При этом iiacco-габаритные и энергетические Гарактеристики вычислителя позволяют осуществить его реализацию в бортовом варианте исполнения.
KoiMuiittcm cuemtim управлета MUMMTI AV Таким обравом, предлагаемое устройство обеспечивает повышение безопасности прямолинейного движения и повоотов АТС на пересеченной местности в у6ловиях неподготовленного рельефа и отсутствия априорной информации о нем за счет измерения геометрических характеристик рельефа вокруг всего АТС в непосредственной близости от него практически без мертвых зон непросматриваемой поверхности; повышением точности прогнозирования непреодолимых рельефных образований, уак как сведено к минимуму влияние динамики процесса движения, и устройство учитывает текущее положение АТС и взаимодействие его с подстилающей поверхностью, за счет оценки безопасности каждого вида ижения по собственным алгоритмам, учитывающим наиболее ответств лную для него информацию устройство обеспечивает решение вопросов прогнозирования опасных рельефных образований в рельефном масштабе времени движения АТС. Кроме того/ массо-габаритные и энергетические характеристики устройства позволяют осуществить его реализацию в бортовом исполнении.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для предотвращения наезда транспортного средства на препятствие | 1977 |
|
SU663608A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3781111, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| опублик | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
