Предлагаемый радиолокационный маяк-ответчик предназначен для использования в радиотехнических системах военного назначения, в частности для взаимной импульсной «привязки» координат носителей запрашивающей РЛС и маяка-ответчика при навигации и целеуказании.
Необходимым условием обеспечения точности при определении взаимных координат и пространственной «привязке» носителей с использованием системы «РЛС-маяк» является локализация ответных сигналов, соответствующих главному лепестку диаграммы направленности антенны запросчика. В реальных условиях при работе в диапазоне дальностей практически невозможно исключить прием запросных сигналов по боковым лепесткам антенны РЛС-запросчика; ответ на запрос по боковым лепесткам неизбежно приводит к потере точности в определении угловых координат запросчика относительно ответчика за счет нарушения симметричности диаграммы на уровне боковых лепестков либо определения азимута по боковым лепесткам, направление которых значительно отличается от направления главного лепестка. Кроме того, флюктуации коэффициента ослабления сигнала на трассе распространения увеличивают искажения диаграммы и приводят к нестабильности уровня принимаемого сигнала, что еще в большей степени затрудняет определение истинного азимута.
При проектировании маяков, предназначенных для работы с уже разработанными и установленными на различных носителях РЛС, практически приемлемы лишь такие методы исключения мешающего влияния боковых лепестков запросчика, которые могут быть реализованы за счет выбора построения только аппаратуры маяка-ответчика и не связаны с внесением изменений в схемы и конструкции РЛС В этом отношении из известных устройств наиболее близким по технической сущности к предлагаемому является устройство, обеспечивающее реализацию способа.
Здесь исключение влияния боковых лепестков осуществляется за счет использования в приемнике маяка-ответчика дополнительного канала с чувствительностью на 20-30 дБ меньшей, чем основного. При этом сигналы, прошедшие дополнительный канал приемника маяка-ответчика, выводятся на экран индикатора запрашивающей РЛС с измененными относительно основного канала начальной задержкой либо интервалами между импульсами отметки ответа.
Для реализации описанного способа требуется устройство, в состав которого кроме антенных устройств, приемно-декодирующего, кодирующего и передающего устройств ответчика должны быть включены декодирующее и кодирующее (либо линия задержки) устройства дополнительного менее чувствительного приемного канала ответчика, приемник линии ответа и индикатор на запросчике. Выделение главного лепестка диаграммы направленности производится оператором по экрану индикатора РЛС-запросчика, т.е. не автоматически. При этом работа оператора РЛС-запросчика несколько затруднена ввиду необходимости визуального различения на экране кодов отметки главного лепестка от примыкающих отметок боковых лепестков; кроме того, сектор приема сигналов ответа по боковым лепесткам может быть значительно шире главного лепестка, что ухудшает условия наблюдаемости целей.
Ввиду недостаточной точности определения момента облучения главным лепестком диаграммы направленности запросчика на ответчике и необходимости произведения дополнительных действий оператором РЛС-запросчика в условиях сложной боевой обстановки не всегда обеспечиваются необходимые точность и быстродействие. Кроме того, двухканальное (двухпороговое) построение аппаратуры ответчика не позволяет стабилизировать ширину сектора приема ответных сигналов по главному лепестку и достаточно надежно исключить ложные срабатывания за счет приема боковых лепестков при работе в широком диапазоне дальностей от 20-30 км до радиогоризонта, особенно с учетом флюктуаций затухания сигналов, которые за период обзора антенны запросчика могут составлять в сантиметровом диапазоне до 6-8 дБ по 80% уровню вероятности.
Таким образом, основные недостатки реализуемого устройства сводятся к следующему:
- выделение главного лепестка диаграммы направленности антенны запрашивающей РЛС (исключение мешающего влияния боковых лепестков) производится в аппаратуре запросчика оператором (в результате визуального различения отметок главного и бокового лепестков и последующего считывания координат), что снижает быстродействие и точность привязки (определения взаимных координат);
- излучения ответчика производятся при облучении его главным и боковыми лепестками, т.е. в течение времени, значительно (в несколько раз) превышающего необходимое, соответствующее облучению только главным лепестком, что снижает скрытность носителя маяка-ответчика и помехозащищенность связи, увеличивает энергорасход и снижает ресурс маяка;
- принятое в прототипе двухканальное (двухпороговое) построение приемного устройства, независимо от выбора соотношения между чувствительностями по этим порогам, не обеспечивает достоверного выделения главного лепестка и стабилизацию ширины соответствующей ему отметки в РЛС при работе во всем возможном диапазоне дальностей, особенно с учетом флюктуаций затухания сигнала на трассе распространения.
Целью настоящего предложения является повышение точности и быстродействия определения координат в системе «РЛС-маяк» при работе РЛС с адресным запросом в широком диапазоне дальностей от минимальной до радиогоризонта, особенно в условиях флюктуации коэффициента ослабления сигнала на трассе распространения, а также снижение энергорасхода и повышение скрытности работы маяка.
Поставленная цель достигается благодаря стабилизации уровня срабатывания ответчика по главному лепестку и исключения ответа по боковым лепесткам запросчика, обеспечиваемым за счет введения в состав радиолокационного маяка-ответчика, содержащего многоотводное приемное устройство с различными порогами срабатывания, соединенное с ним устройство декодирования, формирователь ответных сигналов и передатчик пяти дополнительных последовательно соединенных схем - поимпульсного сравнения амплитуд сигналов, выдержки времени, запоминания максимальной амплитуды, автоматического выбора отвода и селекции, причем выход схемы селекции подключен к формирователю ответных сигналов, второй выход схемы запоминания максимальной амплитуды подключен к входу схемы, поимпульсного сравнения амплитуд сигналов, выход устройства декодирования подключен к другим входам схемы селекции и схемы поимпульсного сравнения амплитуд, выход приемного устройства подключен к второму входу схемы автоматического выбора отвода и третьему входу схемы поимпульсного сравнения амплитуд, а второй выход поимпульсного сравнения амплитуд соединен со вторым входом схемы запоминания максимальной амплитуды, а также за счет выбора числа отводов n и величин перепадов порогов срабатывания в приемном устройстве в соответствии с максимальным динамическим диапазоном сигналов запроса Д и размахом флюктуации сигнала по выбранному уровню вероятности А(р), удовлетворяющим соотношению 
Так, например, для типичного случая работы маяка с самолетной РЛС-запросчиком, когда динамический диапазон сигналов (определяемый с учетом диапазона дальностей, разброса параметров РЛС и метеоусловий) составляет около 40 дБ, а размах амплитуды флюктуаций затухания сигнала (сантиметрового диапазона) на трассе распространения за период обзора РЛС составляет 7-8 дБ - по уровню вероятности 0,8 и около 10 дБ - по уровню 0,95, число отводов должно быть около 8-10. Верхний предел целесообразного числа отводов определяется характеристиками диаграммы направленности антенны РЛС-запросчика (крутизной скатов главного лепестка и перепадом усиления между главным и боковыми лепестками) и величиной действующего динамического диапазона сигналов Д и для типичных характеристик РЛС может быть оценен по формуле 
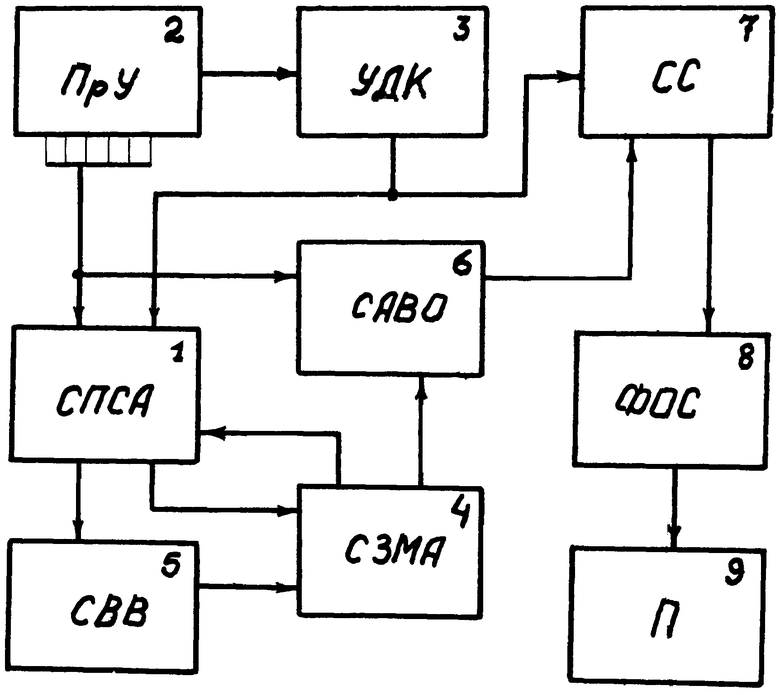
Блок-схема предлагаемого маяка-ответчика приведена на чертеже.
Радиолокационный маяк-ответчик содержит схему поимпульсного сравнения амплитуд 1 (СПСА), приемное устройство 2 (ПрУ), устройство декодирования 3 (УДК), схему запоминания максимальной амплитуды 4 (СЗМА), схему выдержки времени 5 (СВВ), схему автоматического выбора отвода 6 (САВО), схему селекции 7 (СС), формирователь ответных сигналов 8 (ФОС) и передатчик 9 (П).
На вход СПСА (1) поступают сигналы по всем отводам с выхода приемника (2). Для повышения помехозащищенности в СПСА (1) производится селекция запросных сигналов сигналами, прошедшими через УДК (3), подключенное к самому чувствительному отводу ПрУ (2). Проселектированный сигнал передается на СЗМА (4), где запоминается по каждому отводу. Запомненные в СЗМА (4) сигналы подаются в СПСА (1), где в момент прихода нового принятого ПрУ (2) сигнала происходит поимпульсное сравнение его на выходе каждого из отводов с ранее запомненным. В случае приема по очередному отводу сигнала, которого ранее не было в памяти СЗМА (4), сигнал запоминается по этому отводу и в СВВ (5) начинается отсчет времени. Обновление начала отсчета времени осуществляется каждый раз при превышении принятым импульсом уровня (по номеру отвода), запомненного ранее СЗМА (4). По истечении времени, равного примерно половине периода вращения антенны запросчика, т.е. большего времени между облучением боковым лепестком и главным лепестком, счет времени в СВВ (5) прекращается и выдается команда в СЗМА (4) на перепись хранящегося в памяти уровня сигнала в САВО (6), где сигнал хранится до следующей команды на перепись. Таким образом, в СЗМА (4) осуществляется поиск максимального по амплитуде сигнала, соответствующего уровню сигнала в максимуме диаграммы направленности запрашивающей РЛС, этот сигнал переписывается в САВО (6) и удерживается там примерно на период вращения антенны.
После переписи память СЗМА (4) освобождается и осуществляется новый цикл поиска максимальной амплитуды сигнала, т.е. максимума диаграммы направленности.
В САВО (6) по запомненной информации об уровне при поступлении с отводов приемника (1) сигналов выбирается один отвод, для которого уровень сигнала отличается от максимального запомненного примерно на величину половины перепада между коэффициентом усиления в главном и боковых лепестках диаграммы направленности антенны. Сигналы по выбранному отводу подаются на схему селекции (7), где осуществляется выделение сигналов, имеющих требуемый код запроса. Сигналы, прошедшие (7), запускают ФОС (8) и П (9). Число отводов приемника (2) установлено не меньшим значения отношения возможного динамического диапазона сигналов к полуразмаху флюктуаций по выбранному уровню вероятностей. Таким образом, указанное взаимодействие отдельных схем приводит к автоматическому выбору и стабилизации уровня принятого сигнала так, что обеспечивается срабатывание ответчика при его запросе главным лепестком диаграммы направленности.
Следовательно, предлагаемый радиолокационный маяк-ответчик обеспечивает ответ запросчику только по главному лепестку, что обуславливает достижение поставленной цели - повышение быстродействия и точности определения координат в системе «РЛС-маяк», а также снижение энергорасхода и повышение скрытности работы маяка.
Расчетные оценки и моделирование работы систем «РЛС-маяк», основанные на данных экспериментальных исследований характеристик распространения сигналов на реальных трассах и опыте эксплуатации и испытаний системы целеуказания МРСЦ-1 и РЛ маяков типа РМ, «Огонек», показали, что применение предлагаемого устройства приведет к уменьшению составляющей ошибки привязки, обусловленной погрешностью считывания, на 30-50%; время считывания с экрана сокращается на 20-40%; скрытность работы маяка-ответчика, оцениваемая по времени работы его в режиме излучения, повышается в среднем (при работе в диапазоне дальностей) в 4-5 раз; соответственно сокращается энергорасход (обусловленный, в основном, питанием передатчика).
Уменьшение ошибок привязки приводит к снижению суммарных ошибок, например, в системах целеуказания, что в свою очередь позволит более точно выполнить прицеливание и уменьшить расход средств поражения (ракет и пр.), чем повышается качество всей аппаратуры.
Повышение скрытности особенно важно при размещении ответчика на подводной лодке, работающей в системе целеуказания, и увеличивает боевую ее устойчивость.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЗОРНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1840941A1 |
| РАДИОЛОКАЦИОННЫЙ МАЯК-ОТВЕТЧИК | 1975 |
|
SU1840870A1 |
| Радиолокационная система метрового и низкочастотной части дециметрового диапазонов волн с системой опознавания | 2016 |
|
RU2650198C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК СИСТЕМЫ АКТИВНОГО ЗАПРОСА-ОТВЕТА | 2008 |
|
RU2375723C2 |
| Вторичная радиолокационная система | 1985 |
|
SU1309754A1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2018 |
|
RU2708078C1 |
| Моноимпульсный приёмник запросчика радиоимпульсных сигналов с частотно-временным кодированием | 2017 |
|
RU2669357C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ | 2008 |
|
RU2366971C1 |
| Радиолокационный маяк-ответчик (РЛМО) с передачей координат в цифровом виде | 2021 |
|
RU2762231C1 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
Изобретение предназначено для использования в системе радиолокации. Достигаемый технический результат - повышение точности и быстродействия определения координат в системе «РЛС-маяк». Указанный результат достигается за счет того, что маяк-ответчик содержит многоотводный приемник с различными порогами срабатывания, соединенный с ним блок декодирования и формирователь ответных сигналов, выход которого соединен с входом передатчика, содержит также последовательно соединенные схему поимпульсного сравнения амплитуд (СПСА), схему выдержки времени, схему запоминания максимальной амплитуды, схему автоматического выбора отвода, схему селекции, выход которой подключен к входу ФОС, второй выход СПСА подключен к входу СПСА, выход блока декодирования подключен к другим входам схемы селекции и СПСА, многоотводные выходы приемника подключены к второму входу схемы автоматического выбора отвода и к третьему входу СПСА, второй выход которой соединен с вторым входом схемы запоминания максимальной амплитуды. При этом число отводов приемника определяется по определенным формулам. 1 з.п. ф-лы, 1 ил.
1. Радиолокационный маяк-ответчик, содержащий многоотводный приемник с различными порогами срабатывания, соединенный с ним блок декодирования и формирователь ответных сигналов, выход которого соединен с входом передатчика, отличающийся тем, что, с целью повышения быстродействия и точности определения координат в системе ″РЛС-маяк″, а также повышения скрытности работы маяка, в него введены последовательно соединенные схема поимпульсного сравнения амплитуд, схема выдержки времени, схема запоминания максимальной амплитуды, схема автоматического выбора отвода, схема селекции, выход которой подключен к входу формирователя ответных сигналов, второй выход схемы запоминания максимальной амплитуды подключен к входу схемы поимпульсного сравнения амплитуд, выход блока декодирования подключен к другим входам схемы селекции и схемы поимпульсного сравнения амплитуд, многоотводные выходы приемника подключены к второму входу схемы автоматического выбора отвода и к третьему входу схемы поимпульсного сравнения амплитуд, второй выход которой соединен с вторым входом схемы запоминания максимальной амплитуды.
2. Устройство по п.1, отличающееся тем, что число отводов приемника n определяется по формуле
но не превышающим максимального значения
где Д - возможный динамический диапазон принимаемых сигналов,
А(р) - размах флюктуаций затухания по выбранному уровню вероятности, причем перепад порогов срабатывания по разным отводам установлен одинаковым для всех смежных порогов.

