Заявляемое техническое решение относится к области радиолокации и может быть использовано при измерении угловых координат целей в обзорных радиолокационных станциях (РЛС) с дискретным обзором пространства узким лучом.
Известно, что в процессе обзора пространства сигналы, отраженные от цели и принятые приемником РЛС, сравниваются с порогом обнаружения. В результате для каждой дискреты дальности, в каждом положении луча антенны в плоскости угол места (ε) - азимут (β) на выходе порогового устройства присутствует сигнал (сигнал обнаружен), если он превышает уровень порога, сигнал на выходе порогового устройства отсутствует (пропуск обнаружения сигнала), если принятый сигнал ниже уровня порога.
Поскольку в обзорных РЛС с дискретным обзором пространства узким лучом шаг перемещения луча антенны обычно не превышает ширины диаграммы направленности антенны (ДНА) по уровню половинной мощности, то обнаружение цели в некотором положении луча в одной или в нескольких подряд дискретах по дальности происходит не только максимумом этого луча, но и склонами луча в предыдущих и последующих его положениях, т.е. обнаружение цели происходит в нескольких ближайших положениях луча. Возникает так называемый угловой пакет обнаруженных сигналов (в некоторых источниках, например, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М.: Советское радио, 1974, стр.152-154, используется термин «пачка сигналов»).
Если пакетирование ведется по одной угловой координате, то формируется одномерный угловой пакет обнаруженных сигналов, если по двум - то двумерный.
Обработка обнаруженных сигналов углового пакета (например, в соответствии с источником Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М.: Советское радио, 1974, стр.162-163) позволяет увеличить точность измерения угловых координат цели относительного одиночного измерения.
Известный способ измерения угловых координат целей включает обнаружение в зоне обзора отраженных от целей сигналов, измерение и запоминание амплитуд обнаруженных сигналов и соответствующих им угловых координат луча, при этом в угловой пакет объединяют группу обнаруженных сигналов, если в данной группе в плоскости ε-β нет пропусков сигналов одновременно по обеим угловым координатам (Теоретические основы радиолокации. Под ред. В.Е.Дулевича, М.: Советское радио, 1978, стр.261).
Недостатки известного способа состоят в следующем.
Во-первых, размеры двумерного углового пакета обнаруженных сигналов не ограничены, поэтому при обнаружении нескольких близкорасположенных целей по ним формируется единый двумерный угловой пакет значительных размеров. Вычисление угловых координат целей по таким пакетам осуществляется со значительными ошибками.
Во-вторых, поскольку в двумерный угловой пакет обнаруженных сигналов по цели объединяются сигналы, пропуски между которыми отсутствуют, то сигналы за счет флюктуации отстоящие на некоторое угловое расстояние, в пакет обнаруженных сигналов по цели не включаются и по ним формируются отдельные пакеты. Это приводит к появлению ложных целей и к увеличению ошибок измерения угловых координат истинных целей.
Наиболее близкий способ измерения угловых координат целей с помощью РЛС с дискретным обзором пространства узким лучом включает обнаружение в зоне обзора отраженных от целей сигналов, измерение и запоминание амплитуд обнаруженных сигналов и соответствующих им угловых координат луча РЛС, формирование двумерных угловых пакетов обнаруженных сигналов, при этом в двумерный угловой пакет объединяют группу обнаруженных сигналов, если в данной группе в плоскости ε-β нет положений луча с количеством пропусков сигналов одновременно по обеим угловым координатам большим, чем допустимое значение, вычисление угловых координат целей (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М.: Советское радио, 1974, стр.153-154).
При объединении обнаруженных сигналов в двумерный угловой пакет им присваивается признак этого пакета, например, номер пакета.
На фиг.1 приведены примеры двумерных угловых пакетов обнаруженных сигналов, отличающиеся размерами и конфигурацией, сформированных в соответствии с наиболее близким способом. Положения луча, в которых произошло обнаружение, показаны серым цветом, в положениях луча, обозначенных белым цветом, обнаружений нет. Изображены три вида пакетов обнаруженных сигналов, состоящих из одного, двух и пяти положений луча.
Недостатки наиболее близкого способа состоят в следующем.
Во-первых, размеры двумерного углового пакета обнаруженных сигналов не ограничены, поэтому при обнаружении нескольких близкорасположенных целей по ним формируется единый двумерный угловой пакет значительных размеров. Вычисление угловых координат целей по таким пакетам осуществляется со значительными ошибками.
Во-вторых, поскольку в двумерный угловой пакет обнаруженных сигналов по цели объединяются сигналы, количество пропусков между которыми не превышает заданного (фиксированного) значения, то сигналы, за счет флюктуации отстоящие на большее угловое расстояние, в пакет обнаруженных сигналов по цели не включаются и по ним формируются отдельные пакеты. Это приводит к появлению ложных целей и к увеличению ошибок измерения угловых координат истинных целей.
Заявляемое изобретение направлено на устранение указанных недостатков. Решаемой задачей (техническим результатом), таким образом, является увеличение точности измерения угловых координат целей.
Указанный технический результат достигается тем, что в способе измерения угловых координат целей с помощью РЛС с дискретным обзором пространства узким лучом, включающем обнаружение в зоне обзора отраженных от целей сигналов, измерение и запоминание амплитуд обнаруженных сигналов и соответствующих им угловых координат луча антенны РЛС, формирование двумерных угловых пакетов обнаруженных сигналов, вычисление угловых координат целей, согласно изобретению двумерные угловые пакеты обнаруженных сигналов в зоне обзора или ее части формируют последовательно за несколько шагов, при этом на первом шаге из обнаруженных сигналов выбирают сигнал с максимальной амплитудой, после чего в двумерный угловой пакет объединяют обнаруженные сигналы, находящиеся в области, центр которой совпадает с координатами направления, соответствующими выбранному сигналу с максимальной амплитудой, а размеры по каждой угловой координате равны ширине луча РЛС по этой координате по уровню, соответствующему максимуму боковых лепестков диаграммы направленности антенны РЛС, на каждом последующем шаге двумерный угловой пакет формируют так же, как и на первом шаге, но из обнаруженных сигналов, оставшихся необъединенными в двумерные угловые пакеты на предыдущих шагах, количество шагов выбирают таким, чтобы все обнаруженные сигналы были объединены в двумерные угловые пакеты, по сформированным двумерным угловым пакетам обнаруженных сигналов вычисляют угловые координаты целей.
Суть заявляемого технического решения заключается в следующем.
Поскольку отраженный от цели сигнал, обнаруженный максимумом ДНА РЛС, имеет наибольшую амплитуду среди всех сигналов, обнаруженных по данной цели при различных положениях этой ДНА, то при объединении обнаруженных сигналов в двумерный угловой пакет такой сигнал принимают за центр пакета, а сигналы обнаруженные в его окрестности - за сигналы, обнаруженные склонами ДНА.
Из известного факта о том, что обнаружение цели боковыми лепестками ДНА приводит к значительному искажению ее измеренных угловых координат, следует, что в двумерный угловой пакет обнаруженных сигналов необходимо включать только те обнаруженные сигналы, амплитуда которых превышает уровень боковых лепестков, то есть сигналы из области в окрестности максимального сигнала, ограниченной по обеим угловым координатам шириной ДНА по уровню, соответствующему максимуму боковых лепестков (что примерно в 2.5 больше ширины ДНА по уровню половинной мощности). Таким образом, величина углового пакета обнаруженных сигналов по любой из угловых координат не может превышать количества положений луча, умещающихся на ширине ДНА по уровню боковых лепестков по этой координате. Так, например, при шаге перемещения луча, равном ширине ДНА по уровню половинной мощности (такой шаг обычно используется при регулярном обзоре пространства в обзорных РЛС узким лучом), величина двумерного углового пакета обнаруженных сигналов не может превышать трех положений луча (трех обнаруженных сигналов) по каждой угловой координате.
Таким образом, последовательность операций при объединении обнаруженных сигналов в двумерные угловые пакеты следующая:
- на первом шаге в зоне обзора или ее части выбирают направление луча, соответствующее максимальной амплитуде обнаруженного сигнала, после чего обнаруженные сигналы, находящиеся в области, центр которой совпадает с координатами направления, соответствующего выбранному сигналу, а размеры по каждой угловой координате равны ширине луча РЛС по этой координате по уровню, соответствующему максимуму боковых лепестков ДНА, объединяют в двумерный угловой пакет, присваивая указанным сигналам признак этого пакета;
- на каждом последующем шаге двумерный угловой пакет формируют так же, как и на первом шаге, но из обнаруженных сигналов, оставшихся необъединенными в двумерные угловые пакеты на предыдущих шагах, до тех пор, пока все обнаруженные сигналы не будут объединены в двумерные угловые пакеты.
По полученным двумерным угловым пакетам обнаруженных сигналов вычисляют угловые координаты целей.
Поскольку размеры двумерных угловых пакетов обнаруженных сигналов в заявляемых технических решениях фиксированы, то при обнаружении нескольких даже близкорасположенных целей по ним формируются различные двумерные угловые пакеты. Ошибки вычисления угловых координат целей по таким пакетам значительно меньше, чем в известных технических решениях.
В двумерный угловой пакет обнаруженных сигналов по цели объединяются сигналы, даже если между ними имеются пропуски по угловым координатам. Поэтому сигналы, отстоящие за счет флюктуации от других сигналов на большее угловое расстояние, также включаются в пакет, и по ним отдельные пакеты не формируются. Это также увеличивает точность измерения угловых координат целей.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - примеры двумерных угловых пакетов обнаруженных сигналов в наиболее близком и в заявляемом способах. Для наиболее близкого способа двумерные угловые пакеты, приведенные на фиг.1, состоят из одного, двух и пяти сигналов. Для заявляемого способа штриховой линией показаны границы области, в которой обнаруженные сигналы объединяются в двумерный угловой пакет, знаком «+» обозначено положение луча с максимальной амплитудой сигнала. Для заявляемого способа двумерные угловые пакеты, приведенные на фиг.1, состоят из одного, двух и четырех сигналов.
Фиг.2 - блок-схема РЛС, реализующей заявляемый способ.
Заявляемый способ измерения угловых координат объекта реализуется с помощью радиолокационной станции, которая содержит (фиг.2) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат 7 соответственно, блок оценки угловых координат 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования двумерных угловых пакетов 9 и вычислитель 10, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока формирования двумерных угловых пакетов 9, М выходов которого соединены с М входами вычислителя 10, выход которого является выходом блока оценки угловых координат 7 и выходом РЛС.
Количество выходов запоминающего устройства обнаруженных сигналов 8, входов и выходов блока формирования двумерных угловых пакетов 9 и входов вычислителя 10, т.е. значение М, определяются наибольшим количеством сигналов, обнаруженных в зоне обзора РЛС или ее части.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, т.2, - М.: Советское радио, 1977, с.132-138).
Приемник 4 супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Запоминающее устройство обнаруженных сигналов 8 - запоминающее устройство (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: Радио и связь, 1984).
Блок формирования двумерных угловых пакетов 9 - вычислитель, реализующий операцию объединения обнаруженных сигналов в двумерный угловой пакет в соответствии с алгоритмом:
- на первом шаге в зоне обзора или ее части выбирают направление луча, соответствующее максимальной амплитуде обнаруженного сигнала, после чего в двумерный угловой пакет объединяют обнаруженные сигналы, находящиеся в области, центр которой совпадает с координатами направления, соответствующего выбранному сигналу, а размеры по каждой угловой координате равны ширине луча РЛС по этой координате по уровню, соответствующему максимуму боковых лепестков ДНА; объединение сигналов в двумерный угловой пакет осуществляется путем присвоения указанным сигналам признака этого пакета, например, номера пакета;
- на каждом последующем шаге двумерный угловой пакет формируют так же, как и на первом шаге, но из обнаруженных сигналов, оставшихся необъединенными в двумерные угловые пакеты на предыдущих шагах, до тех пор, пока все обнаруженные сигналы не будут объединены в двумерные угловые пакеты.
Вычислитель 10 - вычислитель, реализующий операцию вычисления угловых координат объекта, например, в соответствии с источником Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Советское радио, 1974, стр.162-163.
Работа РЛС, реализующей заявляемый способ измерения угловых координат объекта, происходит следующим образом. В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд обнаруженных сигналов с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования двумерных угловых пакетов 9, где осуществляется формирование двумерных угловых пакетов обнаруженных сигналов в соответствии с приведенным ранее алгоритмом. Координаты положений луча, которые вошли в состав двумерного углового пакета, и соответствующие им уровни сигналов подаются на вход вычислителя 10, где вычисляются угловые координаты объекта.
Таким образом, в РЛС, реализующей заявляемый способ, достигается заявляемый технический результат - увеличение точности измерения угловых координат целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОКАНАЛЬНОЙ ПЕЛЕНГАЦИИ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352956C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2009 |
|
RU2408029C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| Способ измерения угловых координат цели | 2016 |
|
RU2649880C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2362183C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2008 |
|
RU2363015C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358285C1 |
Заявляемое техническое решение относится к области радиолокации и может быть использовано при измерении угловых координат целей в обзорных радиолокационных станциях с дискретным обзором пространства узким лучом. Достигаемым техническим результатом является увеличение точности измерения угловых координат целей. В заявляемом способе вычисление угловых координат целей осуществляют по двумерным угловым пакетам обнаруженных сигналов, которые формируют последовательно за несколько шагов, при этом на каждом шаге из множества обнаруженных сигналов, не объединенных в пакеты, выбирают сигнал с максимальной амплитудой, после чего в двумерный угловой пакет объединяют обнаруженные сигналы, находящиеся в области, центр которой совпадает с координатами выбранного направления, а размеры по каждой угловой координате равны ширине луча по этой координате по уровню, соответствующему максимуму боковых лепестков, количество шагов выбирают таким, чтобы все обнаруженные сигналы были объединены в двумерные угловые пакеты, по полученным двумерным угловым пакетам обнаруженных сигналов вычисляют угловые координаты целей. 2 ил.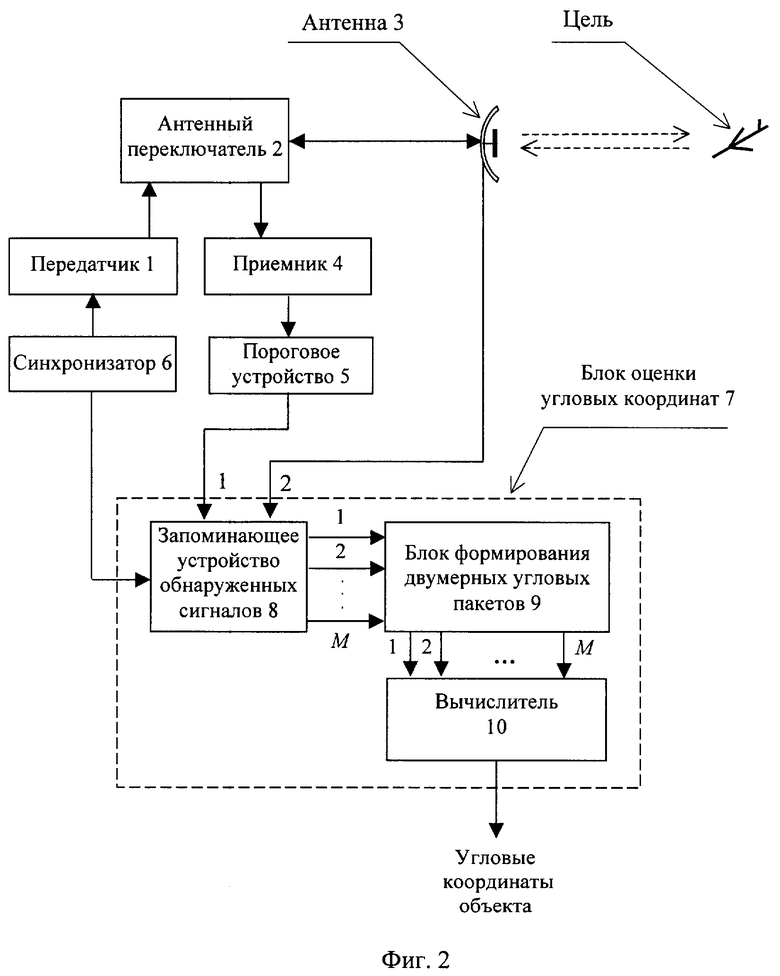
Способ измерения угловых координат целей с помощью радиолокационной станции (РЛС) с дискретным обзором пространства узким лучом, включающий обнаружение в зоне обзора отраженных от целей сигналов, измерение и запоминание амплитуд обнаруженных сигналов и соответствующих им угловых координат луча, формирование двумерных угловых пакетов обнаруженных сигналов, вычисление угловых координат целей, отличающийся тем, что двумерные угловые пакеты обнаруженных сигналов в зоне обзора или ее части формируют последовательно за несколько шагов, при этом на первом шаге из обнаруженных сигналов выбирают сигнал с максимальной амплитудой, после чего в двумерный угловой пакет объединяют обнаруженные сигналы, находящиеся в области, центр которой совпадает с координатами направления, соответствующими выбранному сигналу с максимальной амплитудой, а размеры по каждой угловой координате равны ширине луча РЛС по этой координате по уровню, соответствующему максимуму боковых лепестков диаграммы направленности антенны РЛС, на каждом последующем шаге двумерный угловой пакет формируют так же, как и на первом шаге, но из обнаруженных сигналов, оставшихся необъединенными в двумерные угловые пакеты на предыдущих шагах, количество шагов выбирают таким, чтобы все обнаруженные сигналы были объединены в двумерные угловые пакеты, по сформированным двумерным угловым пакетам обнаруженных сигналов вычисляют угловые координаты целей.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| - М.: Советское радио, 1974, с.153, 154 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В СИСТЕМАХ СО СВЕРХСКАНИРОВАНИЕМ | 1994 |
|
RU2093855C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| US 4837576 A, 06.06.1989 | |||
| US 3735403 A, 22.05.1973 | |||
| Электробаромембранный аппарат трубчатого типа | 2018 |
|
RU2685091C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ГРУНТОВ НА СЖИМАЕМОСТЬ ВИНТОВЫМ ШТАМПОМ | 2004 |
|
RU2258113C1 |

