Область техники
Заявленное изобретение - радиолокационный маяк-ответчик (РЛМО) относится к области систем определения местоположения и предназначено для применения совместно с бортовой приемо-запросной аппаратурой летательных аппаратов (БПЗА ЛА), для обеспечения десантирования; обеспечения привода летательных аппаратов (ЛА) на необорудованные аэродромы; обозначения замаскированных объектов и участков местности; поиска и спасения.
Уровень техники
Радиолокация и радионавигация с активным ответом комплекса «Бортовой локатор ЛА - наземный маяк-ответчик» представляет собой систему с аналоговым сигналом. Быстродействие и точность работы такой системы зависят:
- от способности системы распознавать основной лепесток диаграммы направленности вращающейся антенны локатора кругового обзора ВС (РЛС-П) и игнорировать боковые лепестки диаграммы направленности;
- от флуктуации коэффициента ослабления сигналов на трассе распространения радиосигнала, зависящее от внешних факторов окружающей среды;
- от взаимного расположения РЛМО и ЛА оборудованным БПЗА, а также курса и скорости ЛА;
- от способности оператора, находящемуся в ЛА, безошибочно определять координаты РЛМО по отметкам на индикаторе РЛС-П в меняющихся условиях.
Всё это является недостатком систем радиолокации с аналоговым сигналом и радионавигации с активным ответом, не позволяющим стабильно достигать точностей определения местоположения, предоставляемых глобальными навигационными спутниковыми системами (ГНСС).
Из уровня техники известен РЛМО для использования совместно с аппаратурой летательных аппаратов (SU 1840870 A1, 20.07.2014), который может быть принят в качестве наиболее близкого аналога заявленного изобретения. Известное решение обеспечивает возможность взаимного ориентирования нескольких летательных аппаратов при условии включения маяка-ответчика в состав оборудования летательного аппарата.
Однако известное решение не предназначено для наземного размещения и не позволяет обеспечить привод ЛА на необорудованные аэродромы, обозначить замаскированные объекты и участки местности и не применимо для поиска и спасения.
Задачей заявленного изобретения является устранение указанных недостатков.
Достигаемые технические результаты:
а) Возможность с борта ВС (воздушного судна) быстро установить местонахождение РЛМО с точностью, определяемой глобальной навигационной спутниковой системой (ГНСС), и исключить ошибку оператора бортовой РЛС (радиолокационной станции). В остальных подобных известных устройствах данная возможность (передача координат в цифровом виде) не предусмотрена.
б) Повышение точности определения местоположения РЛМО до 10 метров, достигаемое за счет введения новых режимов «Запрос местоположения» и «Запрос координатной информации.
в) Уменьшение радиочастотного шума (фона), за счет более редкого запроса данных о местоположении РЛМО (нет необходимости часто корректировать данные).
г) При необходимости обеспечить защиту информации о местонахождении РЛМО, путем возможности введения кодирования данных о координатах. Это, также, позволяет исключить ошибки в позиционировании РЛМО, в случае применения средств радиоэлектронной борьбы.
д) Повышение точности вывода ЛА к РЛМО, а также уменьшение опасности обнаружения РЛМО, посторонними компрометирующими радиотехническими средствами.
Раскрытие изобретения
Радиолокационный маяк-ответчик включает устройство управления и обработки информации, устройство приемо-передающее, устройство управления контроля и индикации, антенно-фидерное устройство, устройство управления питанием и формирования вторичных напряжений, блок аккумуляторных батарей, антенну приема сигналов ГНСС.
Для достижения указанного выше технического результата предлагается радиолокационный маяк-ответчик (РЛМО), выполненный с возможностью определения, обработки и передачи координат местоположения и координат объекта в цифровом виде, включающий устройство управления и обработки информации, содержащее, модуль приема и обработки сигналов глобальной навигационной спутниковой системы (ГНСС), первый микроконтроллер, обрабатывающий информацию, полученную от модуля ГНСС, микросхему с программируемой логической интегральной схемой (ПЛИС), для обработки запросных сигналов, поступающих от БПЗА, и формирования ответных сигналов, в том числе и сигналов, содержащих информацию о координатах местоположения в цифровом кодированном виде; устройство приемо-передающее, содержащее, приемник, принимающий и детектирующий запросный сигнал для его дальнейшего декодирования ПЛИС и передатчика, передающего по радиочастоте в БПЗА ответный сигнал, сформированный ПЛИС; устройство управления, контроля и индикации, содержащее дисплей для отображения информации и настроек, клавиатуру для набора координатной информации вручную, второй микроконтроллер для управления клавиатурой, дисплеем и передачи набранных данных в первый микроконтроллер; устройство управления питанием и формирования вторичных напряжений, служащее для преобразования напряжения, выдаваемого блоком аккумуляторных батарей, в напряжение с необходимой мощностью для питания всех остальных устройств РЛМО; антенно-фидерное устройство, содержащее приемную антенну для приёма запросных сигналов и передающую антенну для передачи ответного сигнала; аккумуляторную батарею, обеспечивающую необходимый запас энергии для работы РЛМО в автономном режиме и передачи ответного сигнала, содержащего информацию о собственном местоположении.
Координатные данные передаются в закодированном виде.
Дополнительно заявленное изобретение по специальному запросу обеспечивает передачу координатной информации, предварительно введенной вручную, отличную от координат местоположения.
Осуществление изобретения
Предлагаемый РЛМО является аппаратурой приёма и обработки сигналов активной радиолокации с активным ответом. Изделие принимает запросный импульсно-кодово модулированный сигнал от БПЗА и РЛС-П, формирует ответный сигнал и излучает его обратно в БПЗА ЛА.
Совместная работа РЛМО с БПЗА осуществляется посредством использования определенных фиксированных радиочастот: для запросных (через РЛС-П) и ответных (от РЛМО) сигналов. Используется собственный логический код взаимодействия (протокол) для передачи данных и определения номера РЛМО и БПЗА.
Возможность передачи координат в цифровом виде реализована:
- за счет внедрения в состав радиолокационного маяка-ответчика (РЛМО) быстродействующих цифровых микросхем, в том числе микросхемы ПЛИС, микроконтроллеров, элементов памяти, обеспечивающих прием от ГНСС координатной информации большого объема, запись, обработку и передачу своих координат в цифровом виде кодовой расстановкой ответного сигнала (ОС) повышенной ёмкости 112 бит синхронно запросному сигналу (ЗС), полученному от бортовой приемо-запросной аппаратуры (БПЗА) ЛА.
- за счёт применения передатчика РЛМО с увеличенной допустимой средней мощностью для обеспечения качественной передачи ОС повышенной ёмкости.
В предлагаемом РЛМО к аналоговой системе радиолокации и радионавигации с активным ответом добавляется режим «Запрос координат» в котором на БПЗА передаются цифровые координаты объекта, отличные от координат местоположения РЛМО, полученные от ГНСС.
Алгоритм работы предлагаемого РЛМО с координатами состоит из двух последовательных этапов: предварительно координаты определяются и записываются в память РЛМО, затем, в соответствии с запросом БПЗА, эти координаты передаются на ЛА.
Предпочтительный вариант осуществления заявленного изобретения описывается далее с отсылкой к поясняющему чертежу (Фиг. 1).
Предварительная запись координат в память РЛМО может осуществляться следующими способами:
- автоматическое получение координат от спутников ГЛОНАСС и/или GPS c помощью встроенного в РЛМО модуля ГНСС 8 с антенной ГНСС 9 с последующим сохранением координатных данных в буфер памяти, входящий в состав устройства управления и обработки информации 7.
- ввод координат вручную с помощью клавиатуры 11 и дисплея 12 из состава устройства управления, контроля и индикации 10 с последующим сохранением координатных данных в буфер памяти 16, входящим в состав устройства управления и обработки информации 7.
Выбор варианта координат для отправки в ОС - введенных вручную или полученных от ГНСС - осуществляется оператором РЛМО.
Порядок отправки координат следующий. ЗС от РЛС ВС принимается приемной антенной 3 антенно-фидерного устройства 1, посредством приемника 5 из состава устройства приемо-передающего 4 и декодируется устройством управления и обработки информации 7. Устройство 7 распознает код запроса координат местоположения, либо координат объекта, считывает из встроенного буфера памяти хранения координаты, полученные от модуля ГНСС 8, и преобразует их в вид 112 бит кодовой расстановки ОС. Сформированный ОС подается на передатчик 6 из состава устройства приемо-передающего 4, к выходу которого подключена передающая антенна 2 антенно-фидерного устройства 1.
Напряжения необходимой мощности для питания всех устройств формирует устройство управления питанием и формирования вторичных напряжений 13, которое преобразует их из энергии, хранящейся в блоке аккумуляторных батарей 14.
При использовании цифровых коммуникаций в системе «БПЗА-РЛМО» запрос и ответ осуществляется короткими сообщениями, что обеспечивает автоматическое быстрое и точное получение координат РЛМО без участия оператора на борту. Вдобавок быстрый обмен и возможное шифрование затрудняет обнаружение РЛМО средствами РЭБ противника.
Приемная антенна 3 осуществляет прием запросных сигналов БПЗА на частоте Fзс (запросный сигнал) и выполнена в виде волноводно-щелевой антенны, с круговой диаграммой направленности и горизонтальной поляризацией.
Передающая антенна 2 осуществляет передачу ответных сигналов на частоте Fос (ответный сигнал) и выполнена в виде коллинеарной антенны с круговой диаграммной направленности и вертикальной поляризацией.
Модуль ГНСС 8 и приемная антенна ГНСС 9 с круговой поляризацией осуществляют автоматическое определение собственных координат по глобальным навигационным спутниковым системам (ГНСС).
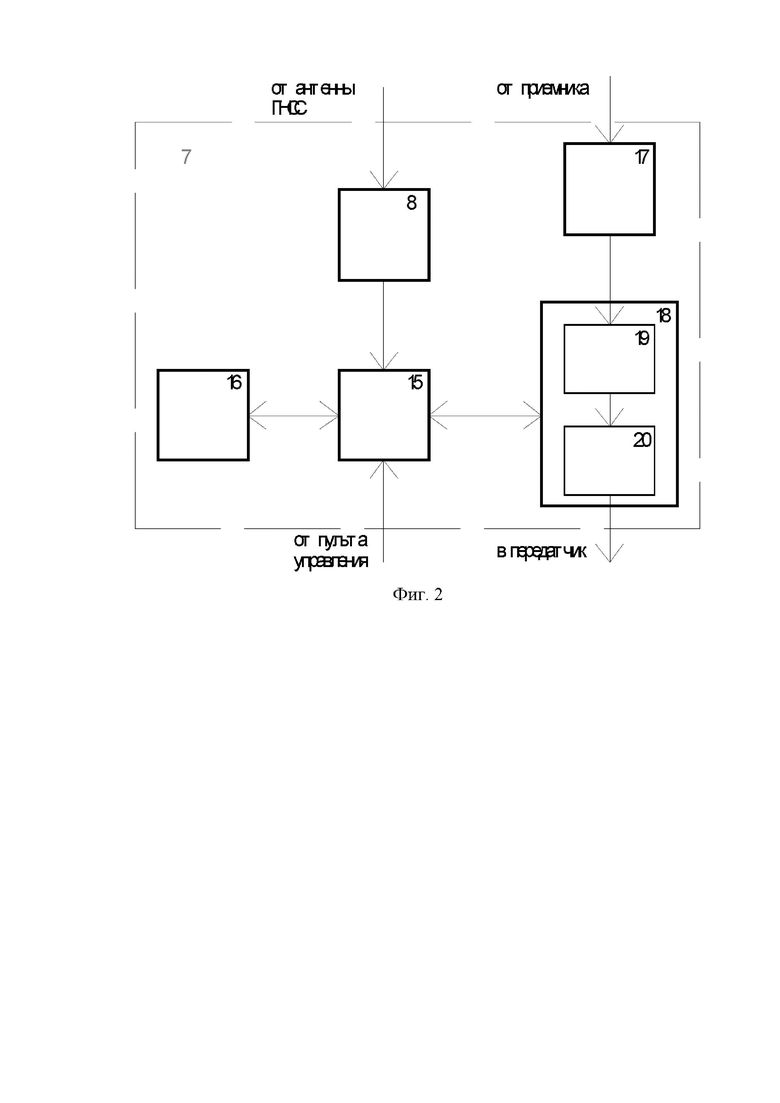
Устройство управления и обработки информации 7 осуществляет обработку запросных сигналов от БПЗА, формирование и выдачу ответного сигнала со структурой соответствующей принятому запросу, управление и инициализацию встроенного контроля составных частей и изделия в целом. Структура устройства управления и обработки информации описывается далее с отсылкой к поясняющему чертежу (Фиг. 2).
Координатная информация, полученная от модуля ГНСС 8 и от устройства управления и индикации 10 записывается в буфер памяти 16 микроконтроллером (МК)15.
Исходя из выбранного режима работы программа МК 15 задает настройки в модуль дешифрации 19 и формирователь ответного сигнала 20.
Ответный сигнал от приемника 5 поступает на вход аналого-цифрового преобразователя 17 (АЦП), где амплитуда сигнала преобразуется в цифровой сигнал для дальнейшей обработки, фильтрации и декодирования в модуле дешифрации 19, реализованный как логический модуль в составе ПЛИС 18.
После определения запросного сигнала модуль дешифрации 19 формирует команду в формирователь ответного сигнала 20 на разрешение выдачи ответного сигнала.
Формирователь ответного сигнала 20, реализованный как логический модуль в составе ПЛИС 18, кодирует ответный сигнал исходя из предварительных настроек, полученных от МК 15 и данных с координатной информации переданных МК 15 из буфера памяти 16.
Для защиты антенн от внешних воздействующих факторов предусмотрено покрытие радиопрозрачным материалом, обеспечена герметичность и возможность их легкого съема и установки.
Для установки на плоскость и ориентации изделия в пространстве предусмотрена специализированная опора (штатив), с возможностью регулировки установочных углов в горизонтальной и вертикальной плоскостях. Штатив - разборная треногая опора, высота которой в собранном виде не более 1 метра, вес не более 3 кг, изготавливается из прочного алюминиевого сплава и легко разбирается и складывается. Острые наконечники на ножках позволяют надежно упирать ее в землю.
Для автономного энергообеспечения РЛМО используются литий-ионные аккумуляторные блоки. РЛМО способен вырабатывать высокую мощность передачи ответного сигнала, обеспечивая дальность взаимодействия с БПЗА ЛА до 150 км на высоте полета ЛА 10 км, также РЛМО обеспечивает длительную работу (не менее 4 часов) в режиме ответа, выдавая необходимую мощность (дальность), и обеспечивает работу в ждущем режиме не менее 24 часов.
Для работы РЛМО с количеством до 30 летательных аппаратов, предусмотрен режим работы изделия - «Индивидуальный запрос», в котором реализован алгоритм селекции ЛА по коду и амплитуде запросных сигналов.
В режимах «Запрос местоположения» и «Запрос координатной информации», РЛМО в ответном сигнале передает координаты собственного местоположения, которые получил по ГЛОНАСС, GPS или координаты объекта, которые были введены вручную. Возможность определения местоположения РЛМО по времени возврата ответного сигнала или по информации о его координатах от ГНСС существенно расширяет применение РЛМО для разнообразных задач, в том числе и гражданских, например - в поисково-спасательных операциях МЧС или географических экспедициях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовая приемо-запросная аппаратура (БПЗА) | 2021 |
|
RU2762140C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| РАДИОЛОКАЦИОННЫЙ ОТВЕТЧИК | 1980 |
|
SU1840987A1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691212C1 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ ВО ВТОРИЧНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ НАБЛЮДЕНИЯ | 2024 |
|
RU2824654C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОДОЛАЗА | 2014 |
|
RU2575045C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |

Изобретение относится к области систем определения местоположения и предназначено для применения совместно с бортовой приемо-запросной аппаратурой летательных аппаратов (БПЗА ЛА), для обеспечения десантирования; обеспечения привода летательных аппаратов (ЛА) на необорудованные аэродромы; обозначения замаскированных объектов и участков местности; поиска и спасения. Техническим результатом является уменьшение времени и повышение точности определения местонахождения заявленного радиолокационного маяка-ответчика (РЛМО). Радиолокационный маяк-ответчик включает устройство управления и обработки информации, первый микроконтроллер, устройство управления и обработки информации, содержащее модуль приема и обработки сигналов глобальной навигационной спутниковой системы (ГНСС), микросхему с программируемой логической интегральной схемой (ПЛИС), устройство приемо-передающее, устройство управления, контроля и индикации, устройство управления питанием и формирования вторичных напряжений, антенно-фидерное устройство и аккумуляторную батарею. 1 з.п. ф-лы, 2 ил.
1. Радиолокационный маяк-ответчик (РЛМО), выполненный с возможностью передачи координат местоположения и координат объекта в цифровом виде, характеризующийся тем, что включает устройство управления и обработки информации, содержащее модуль приема и обработки сигналов глобальной навигационной спутниковой системы (ГНСС), первый микроконтроллер, обрабатывающий информацию, полученную от модуля ГНСС, микросхему с программируемой логической интегральной схемой (ПЛИС) для обработки запросных сигналов, поступающих от бортовой приемо-запросной аппаратуры (БПЗА), и формирования ответных сигналов, в том числе и сигналов, содержащих информацию о координатах местоположения в цифровом кодированном виде; устройство приемо-передающее, содержащее приемник, принимающий и детектирующий запросный сигнал для его дальнейшего декодирования ПЛИС и передатчика, передающего по радиочастоте в БПЗА ответный сигнал, сформированный ПЛИС; устройство управления, контроля и индикации, содержащее дисплей для отображения информации и настроек, клавиатуру для набора координатной информации вручную, второй микроконтроллер для управления клавиатурой, дисплеем и передачи набранных данных в первый микроконтроллер; устройство управления питанием и формирования вторичных напряжений, служащее для преобразования напряжения, выдаваемого блоком аккумуляторных батарей, в напряжение с необходимой мощностью для питания всех остальных устройств РЛМО; антенно-фидерное устройство, содержащее приемную антенну для приёма запросных сигналов и передающую антенну для передачи ответного сигнала; аккумуляторную батарею, обеспечивающую необходимый запас энергии для работы РЛМО в автономном режиме и передачи ответного сигнала, содержащего информацию о собственном местоположении.
2. Радиолокационный маяк-ответчик (РЛМО), выполненный с возможностью передачи координат местоположения и координат объекта в цифровом виде по п.1, характеризующийся тем, что координатные данные передаются в закодированном виде.
| РАДИОЛОКАЦИОННЫЙ МАЯК-ОТВЕТЧИК | 1975 |
|
SU1840870A1 |
| МАЯК-ОТВЕТЧИК ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2426142C1 |
| АВАРИЙНЫЙ РАДИОМАЯК | 2006 |
|
RU2306576C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 0 |
|
SU120781A1 |
| АВАРИЙНЫЙ РАДИОБУЙ | 2012 |
|
RU2496116C1 |
| АВАРИЙНО-СПАСАТЕЛЬНЫЙ РАДИОМАЯК | 2010 |
|
RU2438144C1 |
| CN 206740958 U, 12.12.2017 | |||
| JPH 04168387 A, 16.06.1992 | |||
| Измерительный шунт | 1981 |
|
SU1002972A1 |

