Предлагаемое изобретение относится к импульсным радиолокационным системам (РЛС), работающим с некогерентным передатчиком на неподвижных и подвижных носителях, и может быть использовано как для повышения потенциала связи, так и для разрешения целей по доплеровской частоте.
Известны некогерентные по излучению РЛС, но обеспечивающие доплеровскую фильтрацию сигнала. В [1] описана РЛС, где зондирующий импульсный сигнал после смешения с частотой местного гетеродина переносится на промежуточную частоту, используемую для фазирования когерентного гетеродина. Отраженный сигнал после смешивания с частотой местного гетеродина и усиления поступает на смеситель (фазовый детектор), где смешивается с сигналом когерентного гетеродина. В результате получается когерентный отраженный сигнал на видеочастоте, который далее может быть отфильтрован по доплеровской частоте для разрешения подвижных целей.
Недостатком этого устройства является возможность работы только с простым сигналом, формируемым магнетроном, сложность обеспечения временной стабильности фазы и частоты когерентного гетеродина при больших задержках отраженного сигнала, а также необходимость стабилизации несущей частоты передатчика.
В [2] для запоминания фазы зондирующего сигнала и обеспечения когерентного приема сигналов на интервале между зондирующими импульсами задающему генератору, работающему на несущей частоте излучаемого сигнала, навязывалась начальная фаза колебаний каждого сигнала некогерентного передатчика. Задающий генератор построен на объемном резонаторе. Интервал когерентного приема в эксперименте достигал 2 мс.
Недостатком устройства, так же как и в [1], является ограничение на вид сигнала (простой, формируемый магнетроном) и необходимость стабилизации несущей частоты передатчика от импульса к импульсу.
В способе [3] при излучении некогерентного сигнала магнетронного передатчика производится перенос зондирующего сигнала на промежуточную частоту и прецизионное фазирование устройства синхронизации выборки сигнала к фазе зондирующего сигнала на промежуточной частоте. Принимаемый отраженный сигнал после преобразования и усиления на промежуточной частоте оцифровывается на анализируемой дальности с помощью АЦП. Особенностью получения квадратур отраженного сигнала на анализируемой дальности является то, что они получаются с помощью одного АЦП путем выборки отраженного сигнала на промежуточной частоте в двух соседних точках, разделенных по времени на четверть периода промежуточной частоты. Далее квадратурный сигнал обрабатывается в доплеровских фильтрах для селекции сигналов подвижной цели.
Недостатком способа является ограничение на вид зондирующего сигнала (простой, без внутриимпульсной модуляции), повышенные требования к быстродействию схемы привязки синхронизатора выборки отраженного сигнала к фазе зондирующего сигнала и к стабилизации частоты передатчика. Предполагается, что внутриимпульсная частота некогерентного передатчика постоянна, однако на практике несущая частота одиночного зондирующего сигнала может изменяться, что приводит к тому, что когерентность приема с фазированным гетеродином обеспечивается для части зондирующего импульса, соответственно это приводит к потерям в потенциале связи.
В способе [4], принятом в качестве прототипа, для обеспечения межпериодной когерентной обработки отраженного сигнала при некогерентном зондирующем сигнале, формируемом магнетроном, в каждый период формируют опорный сигнал путем отбора части мощности зондирующего сигнала, переноса его на промежуточную частоту, оцифровки, запоминания и использования его для фазовой коррекции принимаемых сигналов, перенесенных на промежуточную частоту и оцифрованных на интервале между зондирующими импульсами. Квадратурный сигнал приемника после фазовой коррекции когерентно накапливается (межпериодная когерентная обработка). Варианты фазовой коррекции, по существу внутрипериодной обработки отраженного сигнала, включают: 1) предварительное преобразование оцифрованных на промежуточной частоте реализаций принятого и излученного сигналов в комплексные аналитические сигналы и вычисления их кросскорреляции, 2) вычисление реализации I-той квадратуры сигнала на выходе фазовой коррекции путем кросскорреляции реализации принятого сигнала, оцифрованного на промежуточной частоте, с оцифрованным на промежуточной частоте излученным, вычисление Q-той квадратуры на выходе фазовой коррекции путем кросскорреляции реализации принятого сигнала, оцифрованного на промежуточной частоте, с оцифрованным на промежуточной частоте излученным, задержанным на четверть периода промежуточной частоты, 3) винеровскую фильтрацию входного оцифрованного на промежуточной частоте сигнала. Параметры фильтра перестраиваются в соответствии с формой каждого излученного сигнала и соотношением сигнал/шум. Данный фильтр, наряду с коррекцией фазы принятых сигналов, обеспечивающей дальнейшую когерентную обработку, обеспечивает повышение разрешения РЛС по дальности.
Данное решение снимает жесткие требования к внутриимпульсной частотной и фазовой стабильности несущей частоты, поскольку учитывает форму каждого зондирующего сигнала при приеме отраженного.
Недостатком РЛС-прототипа является невозможность когерентной обработки сигнала при перестройке несущей частоты от импульса к импульсу, поскольку промежуточная частота принятого сигнала становится переменной, происходит искажение сигналов в УПЧ и это не учитывается дальнейшей обработкой сигнала.
Целью предлагаемого изобретения является обеспечение возможности когерентной обработки отраженного сигнала при некогерентном формировании зондирующего с произвольной внутриимпульсной модуляцией и перестройкой несущей частоты от импульса к импульсу. Предлагаемое изобретение устраняет необходимость фазирования каких-либо генераторов, снижает требования к стабильности частоты передатчика как внутри импульса, так и от периода к периоду зондирования.
Поставленная цель достигается тем, что в способе когерентного приема отраженного сигнала при некогерентном зондирующем сигнале, включающем излучение мощных импульсных СВЧ-сигналов через приемопередающую антенну, ориентированную в заданном направлении, в интервале между зондирующими импульсами принимают через ту же приемопередающую антенну отраженный сигнал, преобразуют на промежуточную частоту, усиливают и оцифровывают на промежуточной частоте, после этого запоминают, для каждого зондирующего сигнала формируют и оцифровывают опорный сигнал на промежуточной частоте, фильтруют запомненный отраженный сигнал либо в согласованном, либо в винеровском фильтре, комплексная частотная характеристика которых перестраивается и определяется спектром оцифрованного опорного сигнала, квадратурный сигнал после фильтрации когерентно обрабатывается, введено формирование исходного модулированного на промежуточной частоте сигнала, перенос его на несущую частоту путем сдвига на частоту гетеродина и усиление по мощности, в качестве опорного сигнала используется исходный, модулированный на промежуточной частоте сигнал. Согласно предлагаемому способу на промежуточной частоте формируется исходный (опорный) модулированный сигнал с требуемой шириной спектра, который переносится на несущую частоту путем сдвига на частоту гетеродина, усиливается по мощности и излучается приемопередающей антенной в заданном направлении, каждый импульс исходного модулированного сигнала оцифровывают с периодом выборки Тd, удовлетворяющим теореме Котельникова (1/Td>2Δfз, где Δfз - ширина полосы частот, занимаемой зондирующим сигналом с учетом ширины спектра модулирующей функции, уходов или перестроек частоты исходного модулированного сигнала), и запоминают вектор sm, составленный из N выборок m-го опорного сигнала, принятый в течение анализируемого временного интервала длительностью NTd, m-й отраженный сигнал оцифровывают с тем же периодом Тd и запоминают как вектор um, далее фильтруют либо в согласованном, либо в винеровском фильтре, вектор комплексной частотной характеристики которого Zm определен вектором спектральных составляющих аналитической формы опорного сигнала. При этом:

где F-1 - матрица обратного дискретного преобразования Фурье;  - операция почленного перемножения векторов;
- операция почленного перемножения векторов;  - операция почленного деления; D - вектор, координаты которого при
- операция почленного деления; D - вектор, координаты которого при  равны 1, а остальные равны 0, обеспечивает получение аналитического спектра сигнала по спектру действительного; F - матрица прямого дискретного преобразования Фурье; q - отношение сигнал/шум; а - регуляризирующий коэффициент, а>0. Вектор выходного сигнала фильтра в m-м периоде определяется выражением:
равны 1, а остальные равны 0, обеспечивает получение аналитического спектра сигнала по спектру действительного; F - матрица прямого дискретного преобразования Фурье; q - отношение сигнал/шум; а - регуляризирующий коэффициент, а>0. Вектор выходного сигнала фильтра в m-м периоде определяется выражением:

Винеровский фильтр при высоком соотношении сигнал/шум для ряда зондирующих сигналов обеспечивает повышение разрешения РЛС по дальности и уменьшает уровень боковых лепестков сжатого сигнала.
Временные квадратурные реализации сжатого сигнала после фильтрации когерентно обрабатываются с получением радиолокационного изображения цели в координатах дальность - доплеровское смещение частоты для обнаружения и измерения ее координат.
Поставленная цель достигается также тем, что радиолокационная станция, реализующая способ, содержит последовательно соединенные антенну, антенный переключатель, усилитель высокой частоты, смеситель, усилитель промежуточной частоты и второй аналого-цифровой преобразователь, блок когерентной обработки, первый и второй входы которого соединены с одноименными выходами фильтра фазовой коррекции, гетеродин, выход которого соединен со вторым входом смесителя, первый аналого-цифровой преобразователь, выход которого через запоминающее устройство соединен с первым входом фильтра фазовой коррекции, отличающийся тем, что в радиолокационную станцию введены последовательно соединенные блок управления, цифроаналоговый преобразователь, формирователь модуляции сигнала и передатчик, выход которого соединен со вторым входом антенного переключателя, третий выход блока управления соединен с управляющим входом гетеродина, выход которого соединен с третьим входом передатчика, второй выход блока управления соединен с одноименными входами передатчика и формирователя модуляции сигнала, выход которого соединен с первым входом первого аналого-цифрового преобразователя, четвертый выход блока управления соединен со вторыми входами первого и второго аналого-цифрового преобразователя, второе запоминающее устройство, первый вход которого подключен к выходу второго аналого-цифрового преобразователя, второй вход к шестому выходу блока управления, а выход ко второму входу фильтра фазовой коррекции, пятый выход блока управления подключен ко второму входу первого запоминающего устройства.
Сущность изобретения поясняется дальнейшим описанием, структурной схемой РЛС, реализующей данный способ, и временными диаграммами.
Фиг.1 - структурная схема РЛС.
Фиг.2 - временные диаграммы сигналов на выходах блока управления.
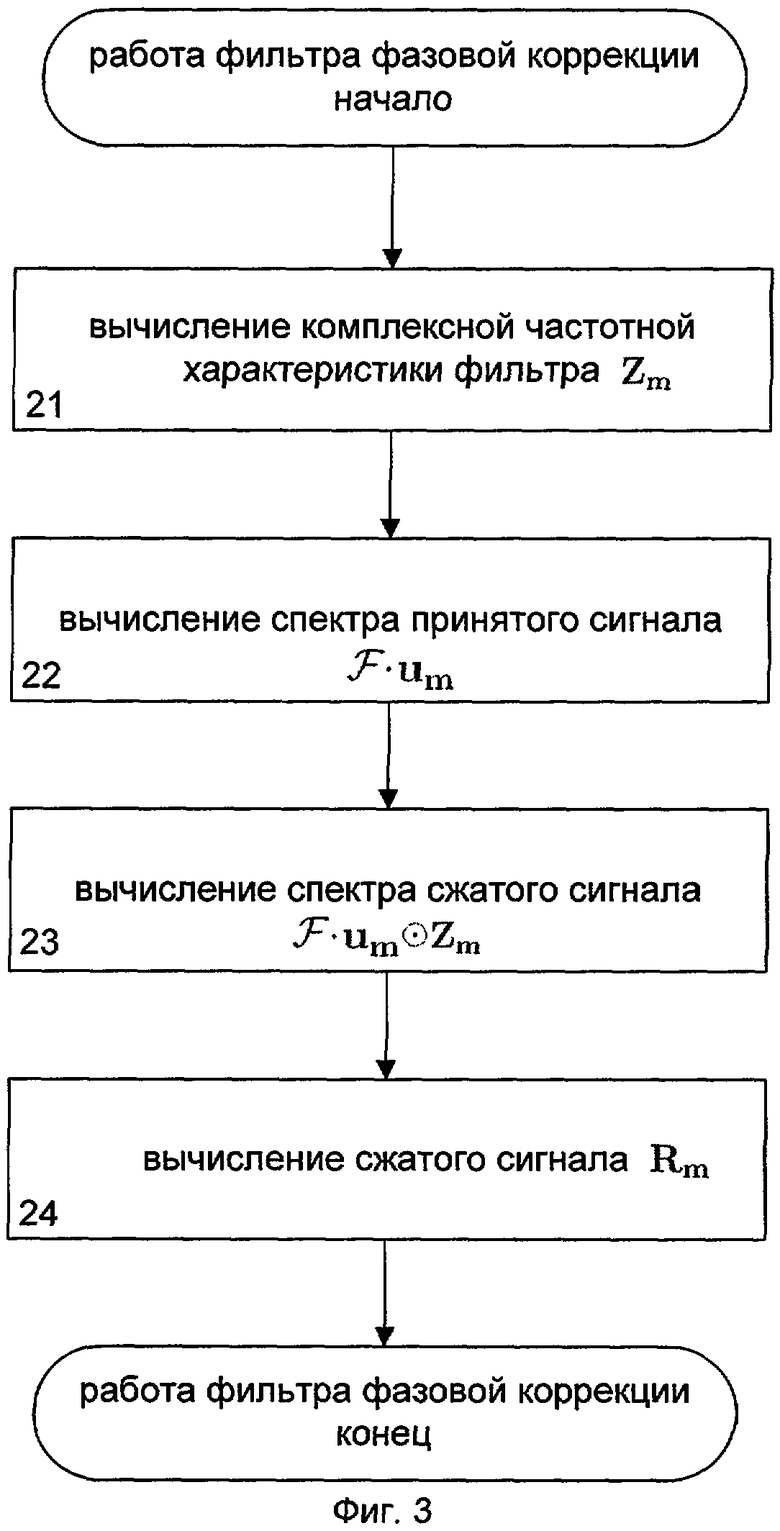
Фиг.3 - алгоритм работы фильтра фазовой коррекции.
На фиг.1 представлена структурная схема РЛС, где приняты следующие обозначения:
1 - антенна (А);
2 - антенный переключатель (АП);
3 - передатчик (ПРД);
4 - формирователь модуляции сигнала (ФМС);
5 - усилитель высокой частоты (УВЧ);
6 - гетеродин (Гет);
7 - блок управления (БУ);
8 - цифроаналоговый преобразователь (ЦАП);
9 - смеситель (СМ);
10 - усилитель промежуточной частоты (УПЧ);
11 - первый аналого-цифровой преобразователь (АЦП1);
12 - второй аналого-цифровой преобразователь (АЦП2);
13 - первое запоминающее устройство (ЗУ1);
14 - второе запоминающее устройство (ЗУ2);
15 - фильтр фазовой коррекции (Ф);
16 - блок когерентной обработки (БКО).
На схеме фиг.1 радиолокационная станция содержит последовательно соединенные антенну 1, антенный переключатель 2, усилитель высокой частоты 5, смеситель 9, усилитель промежуточной частоты 10, второй аналого-цифровой преобразователь 12, второе запоминающее устройство 14, выход которого соединен со вторым входом фильтра фазовой коррекции 15, блок когерентной обработки 16, первый и второй входы которого соединены с одноименными выходами фильтра фазовой коррекции 15, гетеродин 6, выход которого соединен со вторым входом смесителя 9 и третьим входом передатчика 3, первый аналого-цифровой преобразователь 11, выход которого через первое запоминающее устройство 13 соединен с первым входом фильтра фазовой коррекции 15, блок управления 7 через последовательно соединенные цифроаналоговый преобразователь 8 и формирователь модуляции сигнала 4 подключен к первому входу передатчика 3, выход которого соединен со вторым входом антенного переключателя 2, третий выход блока управления 7 соединен с управляющим входом гетеродина 6, второй выход блока управления 7 соединен с одноименными входами передатчика 3 и формирователя модуляции сигнала 4, выход которого соединен с первым входом первого аналого-цифрового преобразователя 11.
Импульсный передатчик 3 может быть выполнен по схеме [5, рис.6, с.396], в которой входной модулированный на промежуточной частоте сигнал переносится на несущую частоту с помощью смесителя, на второй вход которого приходит гетеродинный сигнал, полученный на выходе сигнал с частотой F=fпр+fгет усиливается усилителем мощности на интервале, определяемом длительностью внешнего управляющего сигнала.
Формирователь модуляции сигнала 4 может быть выполнен как генератор на ПАВ, управляемый по частоте внешним аналоговым сигналом, генерация которого на интервале длительности внешнего управляющего сигнала создает выходной сигнал [6, с.212].
Гетеродин 6 перестраивается по частоте в соответствии с кодом внешнего сигнала и может быть выполнен по схеме цифрового синтеза частоты [7, рис.13, с.37]. Стабильность гетеродина 6 должна обеспечивать когерентность приема отраженных сигналов на интервале периода повторения импульсов.
Блок управления 7, фильтр фазовой коррекции 15 и блок когерентной обработки 16 могут быть выполнены на базе сигнальных процессоров. При этом на первом выходе блока управления 7 последовательность цифровых кодов управляет через цифроаналоговый преобразователь 8 частотой сигнала на выходе формирователя модулированного сигнала 4, на втором выходе блока управления 7 формируется периодический сигнал с частотой повторения и длительностью, определяющий частоту повторения и длительность импульсов на выходе формирователя модуляции сигнала 4 и передатчика 3. На третьем выходе блока управления 7 в соответствии с алгоритмом работы РЛС формируется код управления частотой гетеродина 6.
Остальные узлы фиг.1 типовые, широко используются в радиолокации и не требуют пояснения. Необходимо отметить, что полоса пропускания УВЧ 5 должна выбираться с учетом перестройки выходной частоты передатчика 3.
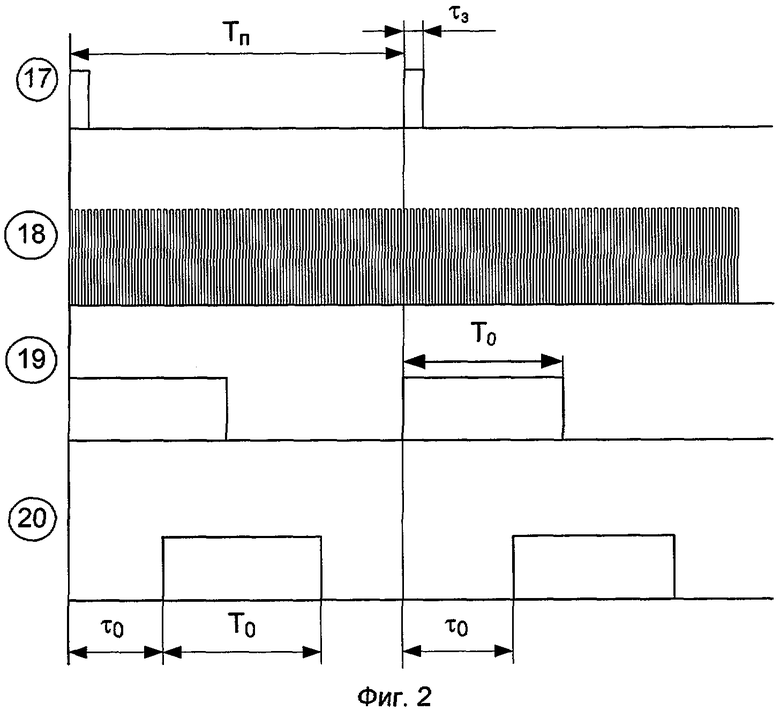
На фиг.2 представлены временные диаграммы сигналов на выходах блока управления 7, а именно:
17 - импульсы с периодом, равным периоду зондирования Тп и длительностью τз, на втором выходе блока управления 7, предназначенные для запуска передатчика 3 и формирователя модуляции сигнала 4;
18 - импульсы с периодом Td на четвертом выходе блока управления 7, предназначенные для тактирования первого и второго аналого-цифрового преобразователя;
19 - импульсы с периодом Тп и длительностью Т0 на пятом выходе блока управления 7, предназначенные для селекции запоминаемых отсчетов зондирующего сигнала;
20 - импульсы с периодом Тп и длительностью, равной длительности обрабатываемого интервала Т0 на шестом выходе блока управления 7, предназначенные для селекции отсчетов принятого сигнала.
Работа РЛС происходит в следующей последовательности. Блок управления 7 управляет и синхронизирует работу узлов РЛС. На втором выходе блока управления 7 формируются импульсы запуска с периодом Тп и длительностью τз (поз.17 фиг.2), поступающие на вторые входы передатчика 3 и формирователя модуляции сигнала 4. В течение этих импульсов на выходе формирователя модуляции сигнала 4 формируются модулированные по частоте (фазе) импульсы промежуточной частоты, поступающие на первый вход передатчика 3. В передатчике 3 производится перенос модулированного на промежуточной частоте сигнала на несущую частоту путем сдвига на частоту гетеродина, сигнал которого приходит на третий вход передатчика 3, полученный таким образом зондирующий сигнал усиливается по мощности и через антенный переключатель 2 поступает на антенну 1 и излучается в заданном направлении. Внутриимпульсная модуляция зондирующего сигнала определяется законом, задаваемым блоком управления 7 на первом выходе, переведенным в аналоговую форму с помощью цифроаналогового преобразователя 8 и поступающим на первый вход формирователя модуляции сигнала 4. Каждый выходной сигнал формирователя модуляции сигнала 4 поступает на первый аналого-цифровой преобразователь 11, где оцифровывается, после чего запоминается в первом запоминающем устройстве 13 на интервале Т0 (поз.19 фиг.2) в качестве опорного. Отраженный сигнал принимается антенной 1, поступает через антенный переключатель 2, УВЧ 5 на первый вход смесителя 9, на второй вход которого приходит гетеродинный сигнал с гетеродина 6. После смесителя 9 преобразованный на промежуточную частоту отраженный сигнал усиливается в УПЧ 10, оцифровывается во втором аналого-цифровом преобразователе 12 и запоминается во втором запоминающем устройстве 14 на интервале селекции отраженного сигнала Т0 (поз.19 фиг.2). Результаты записи сигналов опорного и принятого отраженного поступают на фильтр фазовой коррекции 15, выполняющий вычисление вектора Rm для каждого m-го периода повторения (выражение 2), соответствующего результату либо согласованной, либо винеровской фильтрации. Последовательность квадратурных сигналов на выходе фильтра фазовой коррекции 15 далее когерентно обрабатывается с получением распределения мощности отраженного сигнала в координатах дальность - доплеровская частота.
Поясним подробнее работу схемы фазовой коррекции 15 по сжатию принятых отраженных сигналов, алгоритм работы которого приведен на фиг.3.
Вычисление комплексной частотной характеристики по формуле (1) производится каждый период зондирования. При согласованной фильтрации для этого определяется комплексно-сопряженный спектр опорного сигнала (используется обратное ДПФ), составляющие которого, соответствующие отрицательным значениям частот, обнуляются путем почленного умножения на вектор D. При винеровской фильтрации полученные компоненты вектора дополнительно уравновешиваются в соответствии с мощностью спектральных составляющих опорного сигнала. Затем путем прямого ДПФ вычисляется спектр принятого сигнала и по формуле (2) вычисляется сжатый сигнал.
Для реализации предлагаемого решения не требуется фазирования каких-либо генераторов и точной привязки выборки отраженного сигнала к фазе зондирующего сигнала. Выборки опорного и отраженного сигналов тактируются одним и тем же генератором в БУ 7, который должен обеспечивать когерентность на интервале максимального времени запаздывания. Однако ввиду сравнительно небольшого значения частоты особых требований к его стабильности не предъявляется. Требования к стабильности гетеродина 6 гораздо более жесткие, но и они легко могут быть обеспечены на базе синтезатора частоты, обеспечивающего стабилизацию частоты кварцевым генератором через систему фазовой автоподстройки. Можно сказать, что в заявляемом решении сложности, связанные с обеспечением когерентной обработки отраженных сигналов, переносятся из области конструирования специальных СВЧ-устройств в область цифровой обработки сигналов, быстродействие элементной базы которой постоянно растет, а стоимость падает.
Эффект применения этого способа по сравнению с прототипом заключается в обеспечении возможности когерентного приема пачки сложных сигналов, сформированных некогерентным передатчиком, при этом обеспечивается повышение потенциала связи, возможность селекции подвижных целей, работающих на фоне подстилающей поверхности, возможность синтезирования апертуры раскрыва диаграммы направленности при более простой реализации приемопередатчика. Способ и устройство позволяют относительно просто обеспечивать когерентный прием сигналов при перестройке несущей частоты РЛС от импульса к импульсу, использовать произвольные сложные сигналы без предъявления требований к точности их формирования, в том числе со случайным периодом их повторения.
На основании приведенного описания и чертежей предлагаемое устройство может быть изготовлено при использовании известных комплектующих изделий, известного в радиоэлектронной промышленности технологического оборудования и использовано на подвижных носителях, на которых установлена некогерентная РЛС.
В соответствии с материалами заявки был изготовлен опытный образец устройства и проведены испытания, которые подтвердили указанный в материалах заявки технический эффект.
ЛИТЕРАТУРА
1. Радиоэлектронные системы. Основы построения и теория. Справочник под ред. Я.Д. Ширмана. М.: изд. ЗАО МакВис, 1998 (с.488, рис.19.20).
2. А.И. Астафьев, И.П. Журавлев. Экспериментальные исследования по обеспечению квазикогерентного приема сигнала при некогерентном излучении передатчика. Вопросы специальной электроники, сер. Радиолокационная техника, вып.1, 1976.
3. Патент США 4768035 от 30.08.1988. Coherent radar data collector and sampling technique for noncoherent transmitter radars.
4. Патент Японии 10-132926 от 22.05.1998. Radar equipment and processing method.
5. Справочник по радиолокации. Под. Ред. М. Сколника. Т.3. М.: Советское радио, 1979.
6. Standard Military Voltage controlled Oscilators. 1998/1999 Product Catalog, 1998.
7. Синтезаторы частот и сигналов: учебное пособие. М.: САЙНС-ПРЕСС, 2002.
8. Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высш. шк., 1988, с.448.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| ЦИФРОВОЕ УСТРОЙСТВО КОГЕРЕНТНОЙ ОБРАБОТКИ | 1974 |
|
SU1840884A1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| СПОСОБ ОБРАБОТКИ НЕКОГЕРЕНТНОГО ПАКЕТА РАДИОИМПУЛЬСОВ | 1992 |
|
RU2054691C1 |
| Устройство для измерения фазового сдвига отраженного сигнала | 1983 |
|
SU1167554A1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО КОГЕРЕНТНОЙ РЛС С ОПТИМАЛЬНОЙ ФИЛЬТРАЦИЕЙ СИГНАЛА | 2003 |
|
RU2255351C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕИВАНИЯ ОБЪЕКТА | 2001 |
|
RU2187129C1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1980 |
|
SU1840991A1 |
Изобретение относится к импульсным радиолокационным системам (РЛС) со сложным некогерентным зондирующим сигналом и когерентной обработкой отраженного сигнала. Достигаемым техническим результатом является обеспечение когерентной обработки отраженного сигнала при некогерентном формировании зондирующего сигнала с произвольной внутриимпульсной модуляцией и перестройкой несущей частоты от импульса к импульсу. Указанный результат достигается за счет того, что зондирующий сигнал формируют из опорного, модулированного на промежуточной частоте сигнала путем переноса его на несущую с помощью смесителя и гетеродина, последующего, при этом каждый опорный сигнал оцифровывается, запоминается и используется для расчета комплексной частотной характеристики фильтра фазовой коррекции при приеме отраженных сигналов, в качестве комплексной частотной характеристики фильтра фазовой коррекции используется либо комплексная частотная характеристика фильтра, согласованного с опорным, либо комплексная частотная характеристика винеровского фильтра. 2 н.п. ф-лы, 3 ил.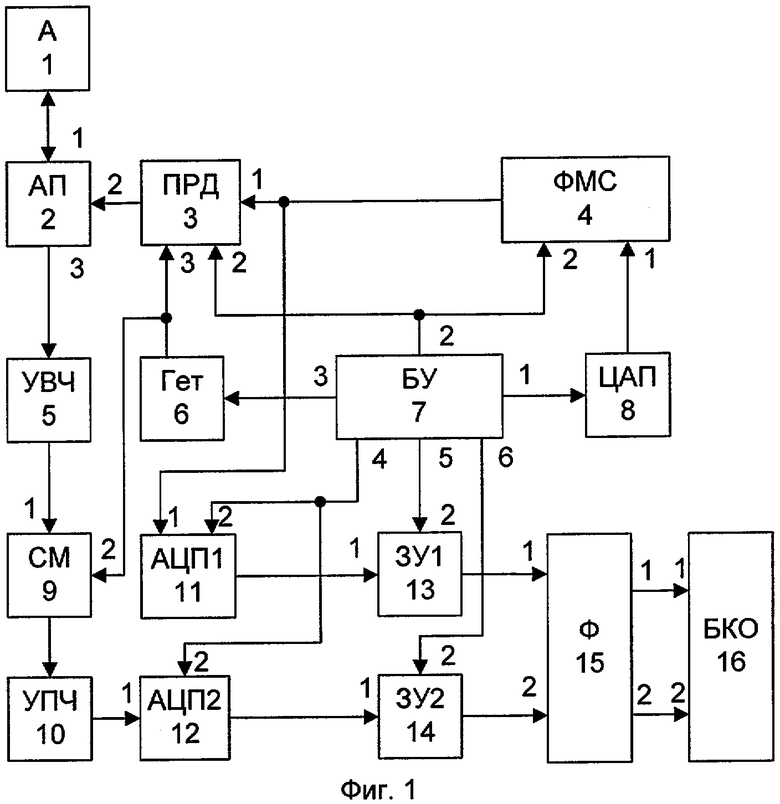
| JP 10132926 А, 22.05.1998 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2001 |
|
RU2218582C2 |
| АБОНЕНТСКИЙ БЛОК И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ В БЕСПРОВОДНОЙ СИСТЕМЕ СВЯЗИ | 1998 |
|
RU2242086C2 |
| СПОСОБ ОБРАБОТКИ НЕКОГЕРЕНТНОГО ПАКЕТА РАДИОИМПУЛЬСОВ | 1992 |
|
RU2054691C1 |
| US 4768035, 30.08.1988 | |||
| US 5504490 А, 02.04.1996. | |||

