Предлагаемое изобретение относится к области имитаторов и тренажеров, предназначенных для обучения операторов радиолокационных станций навыкам их боевой эксплуатации, и может быть использовано в тренажерах для имитации угла поворота антенны радиолокационной станции, в том числе активной и пассивной, для формирования развертки на индикаторе кругового обзора с неподвижной отклоняющей системой.
В настоящее время радиолокационные станции (РЛС) являются современным и перспективным видом радиоэлектронного вооружения. РЛС представляет собой сложную радиотехническую систему, в которой на оператора возлагается одна из основных боевых задач - поиск, обнаружение и определение пеленга (азимута) цели, в процессе выполнения которой он обязан:
- постоянно следить за динамикой обстановки в районе действия РЛС;
- представлять пространственно-временной образ обстановки и предвидеть тенденцию дальнейшего развития событий;
- уметь оперативно и верно прогнозировать различные варианты возникающих ситуаций;
- заранее предусмотреть свои действия с учетом многообразия тактических ситуаций;
- выбрать наилучший план поиска цели по азимуту, обеспечивающий из многих возможных такой план действия, который приводит к обнаружению цели в кратчайшее время и на предельной дальности (см. Клячко Ю.Е., Толстихин Н.В. Организация пространственного поиска в ПРЛС. - Сб. "Вопросы кораблестроения", 1977, №14, с. 18-24. Радченко О.А. Исследование возможности оптимизации параметров поиска ПРЛС. - Сб. "Вопросы кораблестроения", серия "Радиолокация", вып. 8, 1975 г.)
Степень выучки оператора прямо влияет на выполнение боевой задачи, при этом одним из важнейших требований, предъявляемых к выучке оператора, считается освоение им навыков по управлению режимом пространственного поиска цели (см. Абчук В.А. и др. Поиск объектов. - М.: Сов. радио, 1977, с. 3-276). Практика эксплуатации РЛС показывает, что оператор, предварительно прошедший обучение, обнаруживает цель на больших дальностях и за более короткое время, при этом одним из основных требований, предъявляемых к учебно-тренировочным устройствам, (см. Ралль В.Ю. и др. Тренажеры и имитаторы ВМФ. - М.: Воениздат, 1969, с. 3-130; Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 3-31; Бичаев Б.П. Морские тренажеры. - Л.: Судостроение, 1986, с. 4-277) является достоверность имитации режимов работы (управления) аппаратуры РЛС по отношению к реальной с учетом обеспечения простоты конструктивного исполнения и простоты эксплуатации. Одним из основных устройств любого из учебно-тренировочных устройств является имитатор угла поворота, т.е. имитатор антенны (см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 61-101). Именно имитатор угла поворота, его исполнение и функциональные возможности непосредственно оказывают существенное влияние на надежность, трудоемкость изготовления и сложность эксплуатации тренажера в целом, а также эффективность его использования в обучении операторов навыкам боевой эксплуатации по отношению к реальной, а именно: управления скоростью вращения (сканирования) антенны и режимом работы антенна (круговой с учетом направления сканирования или секторный с учетом требуемого значения пеленга биссектрисы и границ сектора). Перспективу развития конструирования необходимо рассматривать с учетом главной цели этого процесса - создавать малогабаритную, высокоэффективную и надежную радиоэлектронную аппаратуру, производство и эксплуатация которой требуют ограниченного расхода трудовых, энергетических и материальных ресурсов (см. Гелль П.П., Иванов-Есипович Н.К. Конструирование и микроминиатюризация радиоэлектронной аппаратуры: Учебник для вузов. - Л.: Энергоатомиздат. Ленингр. отд. 1984, с. 3-13).
Известен имитатор угла поворота (см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 61-62), состоящий из электродвигателя, с которым механически, посредством соответствующего редуктора, связан сельсин-датчик, выходы статорной и роторной обмоток которого подключены к соответствующим входам статорной и роторной обмоток сельсина-приемника, вал ротора которого через редуктор механически связан с подвижной отклоняющей системой индикатора кругового обзора, при этом для осуществления синхронной передачи роторные обмотки сельсина-датчика и сельсина-приемника подключены к источнику сети переменного тока.
Имитатор угла поворота работает следующим образом.
Роторная обмотка сельсина-датчика связана с валом ротора электродвигателя, совершающего равномерное постоянное вращательное движение, мгновенное угловое положение которого в каждый момент времени характеризует азимутальное положение радиальной развертки на экране индикатора кругового обзора, отклоняющие катушки которого жестко связаны с ротором сельсина-приемника и являются нагрузкой имитатора углового поворота.
Реализация имитатора обеспечивает осуществление синхронной передачи в двух исполнениях, а именно:
- без редуктора, при этом ошибка рассогласования (δо) между значением угла поворота вала двигателя (датчика) и значением угла поворота ротора сельсина-приемника может достигать величины δо≈(1÷2,5)°;
- с двумя редукторами, один из которых ускоряет, а другой замедляет передачу в N раз. За счет того, что отклоняющая катушка и вал электродвигателя при наличии редукторов вращаются в N раз медленнее, чем роторы сельсинов, ошибка рассогласования уменьшается в N раз и может достигать величины δо≈±20′ (см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 62; Артамонов В.М. Следящие системы радиолокационных станций автоматического сопровождения и управления. - Л.: Судостроение, 1969, с. 100-104).
Рассмотренный имитатор угла поворота в конструктивном исполнении представляет собой сложное электромеханическое устройство и отличается малой надежностью, большой трудоемкостью изготовления, большим уровнем шума и сложностью эксплуатации. Такое построение имитатора предполагает применение в качестве нагрузки отклоняющих катушек подвижной отклоняющей системы индикатора кругового обзора имитируемой РЛС. Имитатор также является сложным в конструктивном исполнении и трудоемким в изготовлении электромеханическим устройством, что в конечном итоге приводит к снижению эксплуатационных характеристик в целом всего тренажера, в котором используется данный имитатор угла поворота.
Рассмотренный имитатор угла поворота (см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 61-62) характеризуется ограниченными функциональными возможностями, т.к. не обеспечивает:
- оперативное управление направлением и скоростью изменения азимута угла поворота;
- имитацию секторного режима изменения азимута угла поворота с учетом оперативного задания исходного значения и изменения в процессе работы азимута биссектрисы и границ (размера) сектора с учетом обеспечения возможности изменения скорости изменения азимута угла поворота в установленном секторе;
- формирование информации о текущем значении азимута угла поворота в цифровом виде, что исключает его применение в виде автономного устройства для имитации азимута антенны при использовании в комплексном тренажере подготовки операторов РЛС, имеющей в своем составе ЭВМ.
В связи с этим, рассмотренный имитатор угла поворота отличается низкими эксплуатационными характеристиками и ограниченными функциональными возможностями из-за:
- применения сложных механических блоков, характеризующихся большой трудоемкостью изготовления, малой надежностью, сложностью в эксплуатации и большим уровнем шума в работе;
- ограниченной области имитации режимов работы и управления по отношению к режимам работы антенных устройств реальных РЛС;
- значительной ошибки рассогласования между текущим значением углового положения вала на выходе имитатора, жестко связанного с подвижными отклоняющими катушками индикатора кругового обзора (ИКО), по отношению к угловому положению вала двигателя, являющегося задатчиком угла поворота;
- значительной сложности тренажера в целом, в котором используется данный имитатор, т.к. в этом случае в качестве ИКО имитируемой РЛС требуется применение ИКО с подвижной системой вращения отклоняющих катушек, реализуемых на базе сложных в конструктивном исполнении и трудоемких в изготовлении электромеханических устройств.
Известен также имитатор угла поворота под названием "Формирователь импульсов начала и конца сектора сканирования" (см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 99-100), состоящий из электродвигателя, на оси которого жестко закреплен диск с расположенным на нем магнитом, против которого соосно с ним установлен другой диск, на котором жестко расположены три датчика: датчики начала и конца сектора сканирования и датчик биссектрисы сектора сканирования, при этом на оси второго диска жестко установлен токосъемник и два преобразователя угла поворота в код, сама ось второго диска жестко связана со штурвалом перемещения сектора сканирования, а выходы первого и второго преобразователей угла поворота в код являются соответственно первым и вторым выходами данного устройства.
Рассмотренный формирователь импульсов начала и конца сектора сканирования работает следующим образом.
Ось электродвигателя, а следовательно и диск с постоянным магнитом вращается в одном направлении изменения угла поворота оси (вала) электродвигателя с постоянной скоростью. При вращении электродвигателем диска с постоянным магнитом перед вторым диском, в датчиках последовательно формируются импульсы начала сектора сканирования, биссектрисы сектора сканирования и конца сектора сканирования. Для определения координат границ сектора сканирования служат два преобразователя угла поворота в двоичный код, которые в конструктивном исполнении могут быть реализованы на базе преобразователей с кодовыми дисками, индукционными датчиками, магнитным барабаном или преобразователей, основанных на применении диска с прорезями (см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 70-74). Показания одного из преобразователей угла поворота в код соответствует положению, левой границы сектора сканирования, а показания второго - положению правой границы сектора сканирования. В начале сектора сканирования импульс, формируемый датчиком начала сектора сканирования, через токосъемник поступает в преобразователь угла поворота в код и показания преобразователя переписываются во внешнее устройство (например, регистр ЭВМ). Аналогичным образом в конце сектора сканировался импульс, формируемый датчиком конца сектора сканирования, поступает во второй преобразователь угла поворота в код и координаты сектора сканирования также переписываются во внешнее устройство (регистр ЭВМ). Импульсы начала и конца сектора сканирования, а также импульс биссектрисы, поступают через токосъемник соответственно в формирователь угловой развертки и формирователь вертикальной метки, с помощью которых стробируется изображение развертки на экране индикатора тренажера, в котором может быть использован рассмотренный "Формирователь импульсов начала и конца сектора сканирования", т.е. развертка воспроизводится на экране индикатора только тогда, когда ее азимут оказывается внутри или на границе сектора сканирования. С помощью штурвала оператор может имитировать изменение (выбор другого) углового положения сектора сканирования.
Рассмотренный имитатор угла поворота под названием "Формирователь импульсов начала и конца сектора сканирования" в конструктивном исполнении представляет собой сложное электромеханическое устройство и отличается малой надежностью, большой трудоемкостью изготовления и сложностью эксплуатации, а также характеризуется ограниченными функциональными возможностями, т.к. не обеспечивает:
- оперативное управление направлением и скоростью изменения азимута угла поворота;
- имитацию сканирования антенны в заданных границах сектора с учетом оперативного изменения в процессе работы границ сектора и изменения скорости (темпа) формирования азимута угла поворота в установленном секторе.
Наиболее близким по технической сущности к предлагаемому имитатору угла поворота является "Цифровой имитатор угла поворота" по пат. №118517, G01S 13/87, Польша, в котором устранена большая часть недостатков "Имитатора угла поворота" и "Формирователя импульсов начала и конца сектора сканирования" (см. Романов А.Н. Тренажеры для подготовки операторов с РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 61-62, 99-100). Имитатор по патенту Польши №118517 выбран в качестве прототипа.
"Цифровой имитатор угла поворота" по пат. №118517, Польша, состоит из последовательно соединенных: генератора импульсов, счетчика и делителя частоты, выход которого подключен к входам первого, второго и третьего генераторов синусоидальных функций, выходы которых подключены соответственно к входам первого, второго и третьего цифроаналоговых преобразователей, а также из дешифратора, первый, второй и третий выходы которого подключены соответственно к входом первого, второго и третьего блоков ввода данных, выходы которых подключены соответственно к другим входам первого, второго и третьего генераторов синусоидальных колебаний, при этом другой выход счетчика подключен к входу дешифратора, а выходы первого, второго и третьего цифроаналоговых преобразователей являются соответственно первым, вторым и третьим выходами данного устройства.
"Цифровой имитатор угла поворота" по пат. №118517, Польша, работает следующим образом.
Величина угла поворота имитируемой антенны вырабатывается в виде параллельного двоичного кода угла поворота с помощью счетчика путем счета тактовых импульсных сигналов генератора импульсов, значение частоты следования которых устанавливается пропорционально величине скорости изменения младшего разряда кода угла поворота. С помощью первого, второго и третьего блоков ввода данных, соединенных посредством дешифратора с вторым выходом счетчика, обеспечивается установка начальных значений кодов соответственно первого, второго и третьего генераторов синусоидальных функций с учетом сдвига численного значения кодов на 120° для каждого из этих генераторов синусоидальных функций. Каждое изменение состояния информации счетчика вызывает появление на выходе делителя частоты короткого импульсного сигнала. Эти сигналы поступают в первый, второй и третий генераторы синусоидальных функций, в которых происходит их накопление с значением сдвига, заданным с помощью блоков ввода данных. Информация на выходе первого, второго и третьего генераторов синусоидальных функций представляет собой параллельный двоичный код, соответствующий значению угла поворота "антенны", при этом мгновенное значение угла поворота одного генератора синусоидальных функций сдвинуто на 120° по отношению к значениям угла поворота, вырабатываемых другими генераторами синусоидальных функций. С помощью цифроаналоговых преобразователей обеспечивается преобразование цифровой информации генераторов синусоидальных функций в напряжение (аналоговый сигнал). Мгновенное напряжение на выходе, первого, второго и третьего цифроаналоговых преобразователей пропорционально "весу" присутствующего на их входах коду. Сменяющиеся входные коды обуславливают изменяющиеся напряжения на выходах первого, второго и третьего цифроаналоговых преобразователей, являющихся первым, вторым и третьим выходами "цифрового имитатора угла поворота". Т.о., данное устройство обеспечивает формирование напряжений синусоидальной формы, сдвинутых по фазе на 120° пропорционально углу поворота, и предназначено для управления работой сельсина-приемника, ротор которого вращает отклоняющую катушку индикатора кругового обзора с вращающейся отклоняющей системой (см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. М., Воениздат, 1980, с. 60-62).
Цифровой имитатор угла поворота по пат. №118517, Польша, по своему конструктивному исполнению исключает необходимость применения сложных электромеханических устройств, что позволяет добиться существенного повышения надежности, снижения трудоемкости изготовления и упрощения эксплуатации, т.е. повысить эксплуатационные характеристики устройства в целом.
Недостатки имитатора угла поворота под названием "Цифровой имитатор угла поворота" по пат. №118517, Польша, заключается в следующем:
- не обеспечивается оперативное управление направлением и скоростью изменения азимута угла поворота;
- не обеспечивается имитация секторного режима изменения азимута угла поворота с учетом обеспечения обучения операторов навыкам управления режимом работы имитируемой антенны, т.е. задание и изменение в процессе работы азимута биссектрисы сектора поиска, размера сектора поиска и скорости сканирования антенны в установленном секторе поиска;
- необходимость использования в качестве оконечного устройства сельсина-приемника, т.к. это приводит к значительной ошибке рассогласования (до 1°, см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. М., Воениздат, 1980, с. 62) между текущим значением угла положения вала ротора сельсина-приемника, жестко связанного с подвижными отклоняющими катушками индикатора кругового обзора тренажера, и значением угла поворота на выходе счетчика.
Это приводит к ограничению имитируемых режимов работы (управления антенны и, как следствие, характеризует недостаточные функциональные возможности имитатора, что в конечном итоге снижает степень выучки оператора боевой работе при решении задачи поиска, обнаружения и определения пеленга цели на предельной дальности и за минимальное время.
Целью настоящего изобретения является повышение степени выучки оператора организации пространственного поиска объектов-целей по азимуту путем имитации работы РЛС, адекватно реальной, по управлению скоростью сканирования ее антенны в установленном секторе поиска.
Поставленная цель достигается тем, что в имитатор угла поворота, содержащий генератор импульсов, счетчик и делитель частоты, введены датчик скорости, коммутатор, блок отработки азимута, датчик сектора, регистр, сумматор, вычитатель, две схемы сравнения, триггер, три дизъюнктора и два конъюнктора, при этом выход генератора импульсов подключен к входу делителя частоты, 1…М выходы которого подключены к соответствующим первым 1…М входам коммутатора, вторые 1…M входы которого подключены соответственно к первым 1…М выходам датчика скорости, второй выход которого подключен к первому входу первого дизъюнктора и первому входу второго дизъюнктора, третий выход датчика скорости подключен к второму входу первого дизъюнктора, выход которого через инвертор подключен к первому входу первого конъюнктора, выход которого подключен к второму входу второго дизъюнктора, выход коммутатора подключен к первому входу счетчика, второй вход которого подключен к выходу второго дизъюнктора, выход триггера подключен к второму входу первого конъюнктора и первому входу второго конъюнктора, выход которого подключен к первому входу третьего дизъюнктора, выход которого подключен к входу триггера, выход регистра подключен к первому входу сумматора и первому входу вычитателя, первый выход датчика сектора подключен к первому входу регистра и второму входу второго конъюнктора, второй выход датчика сектора подключен ко второму входу сумматора и второму входу вычитателя, выход которого подключен к первому входу второй схемы сравнения, выход которой подключал к второму входу третьего дизъюнктора, выход сумматора подключен к первому входу первой схемы сравнения, выход которой подключен к третьему входу третьего дизъюнктора, выход счетчика подключен к входу блока отработки азимута, второму входу регистра, второму входу первой схемы сравнения, второму входу второй схемы сравнения и является первым выходом имитатора угла поворота, а выход блока отработки азимута является вторым выходом имитатора угла поворота.
Введение в состав имитатора угла поворота датчика скорости, коммутатора, трех дизъюнкторов, двух конъюнкторов, инвертора, триггера, регистра, датчика сектора, вычитателя, сумматора и двух схем сравнения с учетом подключения выхода генератора импульсов к выходу делителя частоты, а первого входа и выхода счетчика - соответственно к выходу коммутатора и второму входу регистра с учетом предложенных связей указанных блоков позволяет оператору активно участвовать в управлении темпом (скоростью) формирования информации о текущем азимуте угла поворота антенны и задании параметров (биссектрисы и границ) сектора сканирования имитируемой антенны РЛС по азимуту, т.е. имитировать работу по управлению пространственным поиском объектов-целей по азимуту адекватно условиям реальной работы антенных систем современных РЛС, в том числе и пассивных, что в свою очередь обеспечивает повышение степени выучки оператора практическим навыкам организации оптимального режима пространственного поиска объектов-целей по азимуту, который приводит к обнаружению объектов целей на предельных дальностях за минимальное время и определению координат (азимута и дальности) объектов-целей с максимальной точностью. По своей технической реализации предлагаемое устройство может быть включено в контур тренажерного комплекса, имеющего в своем составе ЭВМ (вычислитель) и обеспечивает использование в качестве оконечного устройства тренажера РЛС индикатор кругового обзора с неподвижной отклоняющей системой, что, в свою очередь, позволяет обеспечить высокие эксплуатационные показатели тренажера в целом за счет упрощения индикаторного устройства, т.е. его реализацию без применения трудоемкой в изготовлении, сложной в эксплуатации и обладающей низкой точностью отработки угла поворота "вращающейся отклоняющей системы".
Авторам не известны имитаторы, обеспечивающие имитацию секторного и кругового режима изменения угла поворота, обеспечивающие оперативное управление размером и пеленгом биссектрисы сектора, направлением и скоростью изменения угла поворота по азимуту и имеющие совокупность признаков, совпадающие с совокупностью признаков предлагаемого имитатора угла поворота. Поэтому предлагаемый имитатор угла поворота по сравнению с известными имитаторами такого назначения обладает существенным отличием.
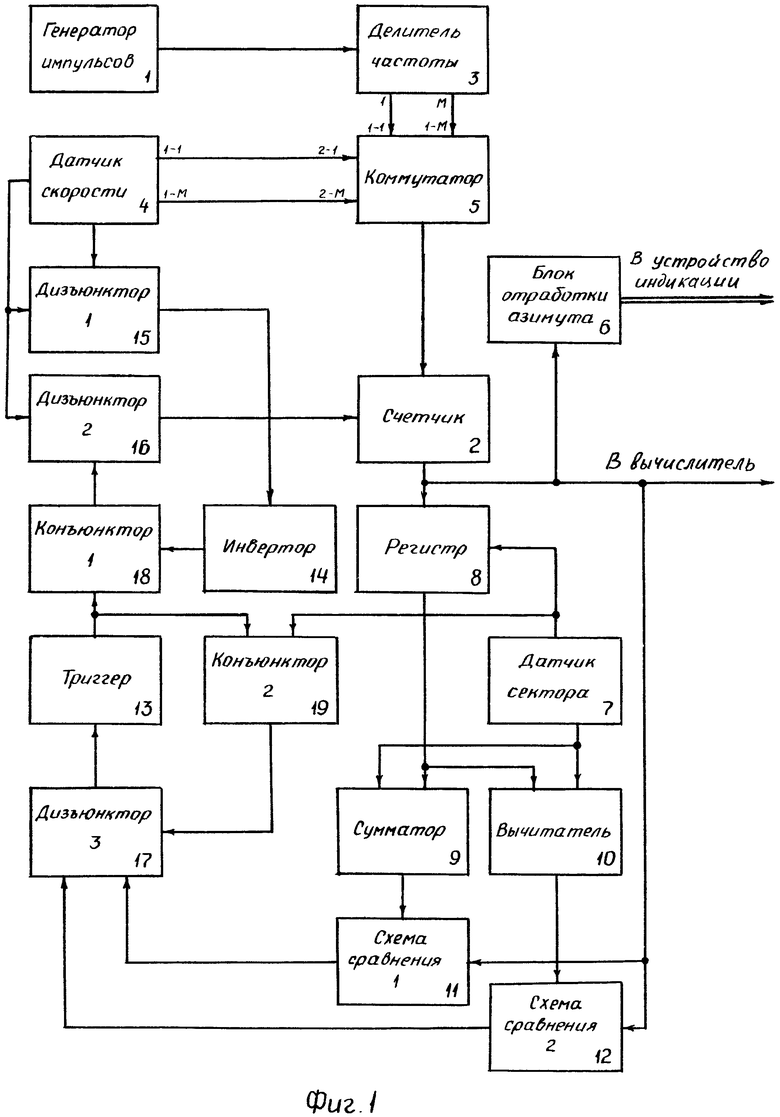
Сущность изобретения поясняется чертежом фиг. 1, где представлена блок-схема предлагаемого имитатора угла поворота.
Предлагаемый имитатор угла поворота содержит генератор импульсов (1), счетчик (2), делитель частоты (3), датчик скорости (4), коммутатор (5), блок отработки азимута (6), датчик сектора (7), сумматор (9), вычитатель (10), схемы сравнения (11) и (12), триггер (13), инвертор (14), дизъюнкторы (15), (16) и (17), конъюнкторы (18) и (19), при этом выход генератора импульсов (1) подключен к входу делателя частоты (3), 1…M выходы которого подключены к соответствующим первым 1…M входам коммутатора (5), вторые 1…М входы которого подключены соответственно к первым 1…М выходам датчика скорости (4), второй выход которого подключен к первому входу первого дизъюнктора (15) и первому входу второго дизъюнктора (16), третий выход датчика скорости (4) подключен к второму входу первого дизъюнктора (15), выход которого через инвертор (14) подключен к первому входу первого конъюнктора (18), выход которого подключен к второму входу второго дизъюнктора (16), выход коммутатора (5) подключен к первому входу счетчика (2), выход триггера (13) подключен к второму входу первого конъюнктора (18) и первому входу второго конъюнктора (19), выход которого подключен к первому входу третьего дизъюнктора (17), выход которого подключен к входу триггера (13), выход регистра (8) подключен к первому входу сумматора (9) и первому входу вычитателя (10), первый выход датчика сектора (7) подключен к первому входу регистра (8) и второму входу второго конъюнктора (19), второй выход датчика сектора (7) подключен к второму входу сумматора (9) и второму входу вычитателя (10), выход которого подключен к первому входу второй схемы сравнения (12), выход которой подключен к второму входу третьего дизъюнктора (17), выход сумматора (9) подключен к первому входу первой схемы сравнения (11), выход которой подключен к третьему входу третьего дизъюнктора (17), выход счетчика (2) подключен к входу блока отработки азимута (6), второму входу регистра (8), второму входу первой схемы сравнения (11), второму входу второй схемы сравнения (12) и является первым выходом имитатора угла поворота, а выход блока отработки азимута (6) является вторым выходом имитатора угла поворота.
1. Генератор импульсов (1) предназначен для формирования непрерывной высокостабильной последовательности тактовых импульсов и может быть реализован по схеме генератора с кварцевой стабилизацией частоты (см. В помощь радиолюбителю: сб. Вып. 76. Составитель В.Г. Борисов. М., ДОСААФ, 1982, с. 55-56), при этом клемма "ВЫХОД" реализуемой схемы генератора с кварцевой стабилизацией частоты является выходом генератора импульсов (1).
2. Счетчик (2) предназначен для формирования М-разрядного параллельного двоичного кода ("Код Па"). Показания счетчика (2) характеризуют значение азимута угла поворота имитируемой антенны. Он может быть реализован по схеме реверсивного синхронного счетчика (см. Браммер Ю.А. и др. Импульсная техника. М., Высшая школа, 1985, с. 273-174), при этом его выходы "Q1…QK", объединенные в К-разрядную кодовую шину, вход "Т" и вход "ШИНА СЛОЖЕНИЯ", подключенная через инвертор, реализуемый по схеме логического элемента НЕ (см. Браммер Ю.А. в др. Импульсная техника. М., Высшая школа, 1985, с. 113-115), к входу "ШИНА ВЫЧИТАНИЯ" реализуемой схемы реверсивного синхронного счетчика, являются соответственно выходом, первым входом и вторым входом счетчика (2).
При наличии на втором входе счетчика (2) сигнала "Лог 1" он будет работать на сложение, а при наличии сигнала "Лог 0" - на вычитание.
В момент перехода значения Па через отметку 360° (0°) показания кода Па счетчика (2) автоматически устанавливаются:
- из состояния "Лог 0" в состояние "Лог 1" во всех разрядах кода Па при его работе на вычитание;
- из состояния "Лог 1" в состояние "Лог 0" во всех разрядах кода Па при его работе на сложение.
3. Делитель частоты (3) предназначен для формирования 1…М непрерывных высокостабильных последовательностей тактовых импульсов и может быть реализован по схеме выработки начальных управляющих сигналов (см. Дроздов Е.А. и др. Проектирование цифровых вычислительных машин. М., Воениздат, 1968, с. 561-667), при этом вход "СИ 1" и выходы "УПРАВЛЯЮЩИЕ ПОТЕНЦИАЛЫ УП1…УПМ" являются соответственно входам и 1…М выходами делителя частоты (3).
Частота следования (период повторения), формируемых на 1…M выходах делителя частоты (3), импульсов каждой из 1…М последовательностей пропорциональна скорости изменения угла поворота вала (азимута) имитируемой антенны.
4. Датчик скорости (4) предназначен дли задания режима управления имитируемой антенны и включения (задания) скорости изменения угла поворота вала имитируемой антенны и может быть реализован с помощью двух- и М-разрядных схем накопителей с применением ИС 133ТМ5 совместно с клавиатурными переключателями (см. ОСТ 11 340.902-78. Микросхемы интегральные полупроводниковые серии 130, 133, 136. Руководство по применению, с. 288-295, чертеж 196), при этом:
- выходы "16" и "15" первой (двухразрядной) схемы накопителя являются соответственно вторым и третьим выходами датчика скорости (4);
- выходы "16, 15, 10 и 9" второй М-разрядной схемы накопителя объединены в М-разрядную шину и являются соответственно первым 1…М выходами датчика скорости (4).
При конструировании датчика скорости (4) на клавиши реализуемых схем накопителей наносятся следующие надписи:
- "ВПРАВО" и "ВЛЕВО" на клавиши "S1 и S2" первой двухразрядной схема накопителя;
- значение скорости изменения угла поворота вала имитируемой антенны на клавиши "S1…SM" второй М-разрядной схемы накопителя.
При нажатии одной из "S1, S2" клавиш первой схемы или "S1…SM" клавиш второй схемы накопителей, на соответствующем нажатой клавише выходе формируется сигнал "Лог 1".
5. Коммутатор (5) предназначен для подключения одной из 1…М последовательностей тактовых импульсных сигналов, поступающих на его соответствующие первые 1…М входы, к первому входу счетчика (2). Выбор требуемой последовательности тактовых импульсов определяется наличием признака (сигнала "Лог 1") на одном из вторых 1…М входах коммутатора (5). Коммутатор (5) сможет быть реализован по схеме коммутатора дискретных сигналов (см. Браммер Ю.А. и др. Импульсная техника. М., Высшая школа, 1985, с. 290-291, рис. 8.26), при этом информационные входы "Д", управляющие входы "А" и выход "У" реализуемой схемы коммутатора являются соответственно первыми 1…M входами, вторыми 1…М входами и выходом коммутатора (5).
6. Блок отработки азимута (6) предназначен для преобразования К-разрядного параллельного двоичного кода Па в угол поворота вала (выходной оси, которую называют ОСЬЮ ОТРАБОТКИ) и может быть реализован по типовой блок-схеме системы автоматического регулирования (см. Майоров Ф.В. Электронные регуляторы. М., Гос. издат. техн.-теоретической литературы, 1956 г., с. 26-31. Гинзбург С.А. Основы автоматики и телемеханики. - М.: Энергия, 1965 г., с. 209-302. Артамонов В.М. Следящие системы радиолокационных станций автоматического сопровождения и управления. - Л.: Судостроение, 1969, с. 379/, при этом задатчик реализуемой системы автоматического регулирования осуществляет прием заданного значения регулируемой величины /кода Па/, а выход /θ Вых/ исполнительного органа /вал ротора исполнительного двигателя/ - является выходом блока отработки азимута /6/. С помощью следящей системы обеспечивается точное следование угла поворота вала ротора исполнительного двигателя за информацией о коде Па, поступающей в задатчик следящей системы блока отработки азимута /6/.
Использование следящей системы в качестве датчика азимута вала позволяет обеспечить слежение азимута вала по отношению к мгновенному /текущему/ значению кода Па не более δо≤/1÷3/′, в то время как ошибка в точности отработки вала сельсина составляет величину ±20′ /см. Артамонов В.М. Следящие системы радиолокационных станций автоматического сопровождения и управления. - Л.: Судостроение, 1969, с. 100-104, 379-429/.
7. Датчик сектора /7/ предназначен для задания численного значения сектора поиска и формирования признака выбора пеленга /азимута/ биссектрисы сектора поиска. Датчик сектора /7/ состоит из датчика одиночного импульса /см. Голышев Л.К. Электронные цифровые вычислительные машины - Киев, Техника, 1965, с. 145, рис. 101a/ и схемы накопителя /см. ОСТ 11340902-78. Микросхемы интегральные полупроводниковые серии 130, 133, 136. Руководство по применению, с. 288-295, чертеж 196/, при этом выход "Λ" реализуемого датчика одиночного импульса является первым выходом датчика сектора /7/, а выходы "16, 15, 10 и 9" реализуемых схем накопителя объединены в К-разрядную кодовую шину и соответствуют второму выходу датчика сектора /7/. С помощью схемы накопителя датчика сектора /7/ обеспечивается путем установки его соответствующих клавиш "S1…S4" в положение НАЖАТО формирование в виде К-разрядного параллельного двоичного кода /"Код Δс"/ численного значения половины (1/2) требуемого размера сектора поиска.
С помощью датчика одиночного импульса датчика сектора /7/ обеспечивается формирование на первом выходе датчика сектора /7/ одиночного положительного импульса "Имп Пб".
8. Регистр /8/ предназначен для формирования численного значения биссектрисы сектора поиска в виде К-разрядного параллельного двоичного кода /"Код Пб"/ и может быть реализован с помощью К-триггеров на базе интегральной микросхемы серии 133ТМ5 /см. Корнейчук В.И. и др. Вычислительные устройства на транзисторах - К.: Техника, 1986, с. 28-30/, входы "с" которых соединены между собой и являются первым входом регистра /8/, а входы " " и выходы "0" реализуемых К-триггеров объединены в К-разрядные кодовые шины и являются соответственно вторым входом и выходом регистра /8/. Значение биссектрисы сектора поиска формируется из кода Па, который с выхода счетчика /2/ поступает на второй вход регистра /8/, путем его записи в регистр /8/ по сигналу "Имп Пб", поступающему с первого выхода датчика сектора /7/ на первый вход регистра /8/.
9. Сумматор /9/ и вычитатель /10/ предназначены для формирования значения суммы /Код Пб + Код Δс/ и разности /Код Пб - Код Δс/. Сумматор /9/ и вычитатель /10/ могут быть реализованы по схеме К-разрядного сумматора/вычитателя /см. Дж. Хилбурн Микро-ЭВМ и микропроцессоры. - М: Мир, 1979, с. 81-82/, при этом:
- /1…К/ разряды входа "А", /1…К/ разряды входа "В" и /1…К/ разряды выхода "СУММА или РАЗНОСТЬ" объединены в кодовые шины и являются соответственно первым входом, вторым входом и выходом для сумматора /9/ и вычитателя /10/;
- для организации выполнения операции суммирования /вычитания/ необходимо на вход "сложить/вычесть" подать сигнал "Лог 0" /"Лог 1"/, т.е. подключить его к корпусу /источнику питания/ реализуемой схемы, что обеспечит выполнение арифметической операции сложения для сумматора /9/ и операции вычитания для вычитателя /10/.
На выходе сумматора /9/ вырабатывается в виде К-разрядного параллельного двоичного кода значение суммы двух кодов:
Код Су = Код Пб + Код Δс
На выходе вычитателя /10/ вырабатывается в виде К-разрядного параллельного двоичного кода значение разнести двух кодов:
Код Ву = Код Пб - Код Δс
Код Су и Код Ву определяют границы сектора с учетом установленных значений пеленга биссектрисы сектора /Код Пб/ и ширины сектора /Код Δс/.
10. Первая /11/ и вторая /12/ схемы сравнения предназначены для формирования импульсных сигналов "Имп Ср1" и "Имп Ср2" соответственно.
"Имп Ср1" формируется на выходе первой схемы сравнения /11/ в момент выполнения условия
Код Су = Код Па,
которые с выхода сумматора /9/ и выхода счетчика /2/ поступают соответственно на первый и второй входы первой схемы сравнения /11/
"Имп Ср2" формируется на выходе второй схемы сравнения /12/ в момент выполнения условия
Код Ву = Код Па,
которые с выхода вычитателя /10/ и выхода счетчика /2/ поступают соответственно на первый и второй входы второй схемы сравнения /12/. В момент формирования импульсных сигналов "Имп Ср1" и "Имп Ср2" направление изменения показаний счетчика /2/ изменяется на противоположное.
11. Триггер /13/ предназначен для имитации направления изменения показаний счетчика /2/ путем формирования сигнала "Сигн. Ни" в виде "Лог 1" /"Лог 0"/.
Триггер /13/ может быть реализован по схеме триггера со счетным запуском /Т-триггера/, который переключается каждым импульсом на счетном входе "Т" /см. Браммер Ю.А. Импульсная техника. - М.: Высшая школа, 1985, с. 259-260/, при этом вход "Т" и выход "Q" реализуемой схемы Т-триггера являются соответственно входом и выходом триггера /13/. По каждому импульсному сигналу, поступающему на вход триггера /13/, информация /"Сигн. Ни"/ на его выходе изменяется на противоположную.
12. Инвертор /14/ предназначен для реализации переключательной функции отрицания и может быть реализован по схеме элемента НЕ, реализующего логическую операцию отрицания одной переменной 

13. Дизъюнкторы /15/, /16/ и /17/ предназначены для реализации переключательной функции логического сложения. Дизъюнкторы /15/ и /16/ могут быть реализованы по схеме элемента ИЛИ с двумя /n=2/ входами, реализующую операцию дизъюнкции переключательной функции двух переменных Y/X1, X2/=X1∨X2, где X1, X2 - входные сигналы; Y/X1, X2/ - выходной сигнал /см. Справочник по цифровой вычислительной технике. Малиновский Б.Н. и др. - К.: Техника, 1974, с. 104/, при этом вход 






14. Конъюнкторы /18/ и /19/ предназначены для реализации переключательной функции логического произведения и могут быть реализованы по схеме элемента "И" с двумя /n=2/ входами, реализующую переключательную функцию конъюнкции переменных
Y/X1, X2/=X1×X2,
где X1, X2 - входные сигналы; Y/X1, X2/ - выходной сигнал /см. Справочник по цифровой вычислительной технике. Малиновский Б.Н. и др. - К.: Техника, 1974, с. 101-104/, при этом вход "X1", вход "X2" и выход "Y" являются соответственно первым, вторым входами и выходом для конъюнкторов /18/ и /19/.
Работа имитатора угла поворота заключается в следующем.
В момент включения электропитания реализуемые блоки /счетчик /2/, регистр /8/ и триггер /13/ автоматически устанавливаются в исходное /нулевое/ состояние. Устройства электропитания автоматической установки исходного состояния и их связи условно не показаны.
Тактовые импульсные сигналы генератора импульсов /1/ поступают на вход делителя частоты /3/, который обеспечивает формирование 1…М непрерывных последовательностей тактовых импульсов. Частота следования импульсов каждой из 1…М последовательностей устанавливается с помощью делителя частоты /3/ пропорционально скорости изменения угла поворота вала /азимута/. С 1…М выходов делителя частоты /3/ сигналы импульсных последовательностей поступают на соответствующие первые 1…М входы коммутатора /5/.
С помощью датчика скорости /4/ обеспечивается имитация ручного или автоматического режима работы /управления/ "антенны" с учетом требуемой скорости изменения угла поворота вала имитируемой антенны.
Имитация ручного режима работы характеризуется наличием сигнала ВЛЕВО в виде "Лог 1" на втором выходе датчика скорости /4/ или сигнала ВПРАВО в виде "Лог 1" на третьем выходе датчика скорости /4/.
Отсутствие сигнала ВЛЕВО и ВПРАВО, что соответствует сигналу "Лог 0" на втором и третьем выходах датчика, скорости /4/, соответствует имитации /включения" автоматического сканирования /изменения азимута вала/ "антенны".
Имитация /задания/ требуемой скорости сканирования "антенны" обеспечивается путем формирования на одном из первых 1…М выходов датчика скорости /4/ сигнала "Лог 1", который поступает на коммутатор /5/. По этому сигналу коммутатор /5/ подключает соответствующий /один из 1…М/ выход делителя частоты /3/ на второй вход счетчика /2/. С помощью счетчика /2/ обеспечивается формирование азимута угла поворота, который вырабатывается в виде параллельного кода Па путем счета тактовых импульсных сигналов, поступающих на первый вход счетчика /2/.
Скорость изменения кода Па определяется частотой поступления импульсных сигналов, поступающих на первый вход счетчика /2/. Направление изменение кода Па на выходе счетчика /2/ задается сигналом управления, поступающим на его второй вход. При наличии на втором входе счетчика /2/ сигнала "Лог 1" он будет работать на сложение /т.е. имитировать изменение азимута угла поворота "ВПРАВО"/, а при наличии сигнала "Лог 0" - на вычитание /т.е. имитировать изменение азимута угла поворота "ВЛЕВО"/.
Признаком работы имитатора угла поворота в режиме имитации ручного управления сканированием "антенной" является наличие сигнала ВПРАВО или ВЛЕВО соответственно на втором или третьем выходе датчика скорости /4/. Данные сигналы вырабатываются в виде сигнала "Лог 1", последовательно проходят через первый дизъюнктор /15/ и инвертор /14/ и поступают в виде сигнала "Лог 0" на первый вход первого конъюнктора /18/, при этом конъюнктор /18/ закрывается. Если необходимо имитировать направление изменения азимута угла поворота антенны ВПРАВО, то с помощью датчика скорости /4/ вырабатывается в виде "Лог 1" сигнал ВПРАВО, который через второй дизъюнктор /16/ поступает на второй вход счетчика /2/ и он будет работать на сложение. Если необходимо имитировать направление изменения азимута угла поворота антенны ВЛЕВО, то с помощью датчика скорости /4/ вырабатывается в виде "Лог 1" сигнал ВЛЕВО. Сигнал ВПРАВО в этом случае будет вырабатываться в виде "Лог 0", который через второй дизъюнктор /16/ поступает на второй вход счетчика /2/, и он будет работать на вычитание.
Как правило, в реальной работе переход в автоматический режим управления сканированием антенны по азимуту выполняется из ручного режима, в котором устанавливают антенну по азимуту, соответствующему требуемому значению азимута биссектрисы сектора поиске.
Признаком установки имитатора угла поворота в режим имитации автоматического управления сканированием "антенной" является отсутствие сигналов ВПРАВО и ВЛЕВО, т.е. наличие на втором и третьем выходах датчика скорости /4/ сигнала. "Лог 0", который через первый дизъюнктор /15/ поступает на инвертор /14/, где преобразуется в сигнал "Лог 1". С выхода инвертора /14/ сигнал "Лог 1" поступает на первый вход конъюнктора /18/ и открывает его. Счетчик /2/ начинает управляться выходным сигналом /"Сигн НИ"/ триггера /15/ поступающим через первый конъюнктур /18/ и дизъюнктор /16/ на второй вход счетчика /2/.
Фиксация азимута биссектрисы сектора поиска в имитаторе угла поворота выполняется с помощью регистра /8/, в который по сигналу "Имп Пб", формируемому с помощью датчика сектора /7/, поступает и хранится значение кода Па. Этим же сигналом "Имп Пб" с помощью второго конъюнктора /19/ и третьего дизъюнктора /17/ выполняется установка триггера /13/ в начальное /нулевое/ состояние. С помощью датчика сектора /7/ задается в виде параллельного двоичного кода Δc численное значение половины /1/2/ сектора сканирования "антенны" по азимуту. Код Δc поступает на вторые входы сумматора /9/ и вычитателя /10/, на первые входы которых поступает с выхода регистра /8/ код Пб. На выходе сумматора /9/ и вычитателя /10/ вырабатываются соответственно:
Код Су = Код Пб + Код Δс
Код Ву = Код Пб - Код Δс
Код Су и Код Ву характеризуют требуемое значение границ сектора, которые поступают соответственно на первые входы первой /11/ и второй /12/ схем сравнения и сравниваются с текущим значением кода Па, поступающим с выхода счетчика /2/ на вторые входы первой /11/ и второй /12/ схем сравнения.
На выходе второй схемы сравнения /12/, в момент выполнения условия Код Па = Код Ву, вырабатывается импульсный сигнал "Имп Ср2", который поступает через третий дизъюнктор /17/ на вход триггера /13/ и изменяет состояние сигнала "Сигн Ни" на выходе триггера /13/ из состояния "Лог 0" в состояние "Лог 1". Изменение состояния сигнала "Сигн Ни" из "Лог 0” в "Лог 1" изменяет работу счетчика /2/, т.е. переводит его работу с вычитания на сложение. На выходе первой схемы сравнения /11/, в момент выполнения условия Код Па = Код Су, вырабатывается импульсный сигнал "Имп Ср1", который также поступает /через третий дизъюнктор /17/ на вход триггера /13/ и изменяет состояние сигнала "Сигн Ни" на выходе триггера /13/ из состояния "Лог 1" в состояние "Лог 0". Изменение состояния сигнала "Сигн Ни" из "Лог 1" в "Лог 0" изменяет работу счетчика /2/, т.е. переводит его работу со сложения на вычитание. Выход счетчика /2/ подключен ко входу блока отработки азимута /6/ и является первым выходом имитатора угла поворота, на котором вырабатывается текущее значение, в виде К-разрядного параллельного двоичного кода Па, азимута угла поворота имитируемой антенны. С помощью блока отработки азимута /6/ выполняется преобразование К-разрядного параллельного двоичного кода Па в угол поворота вала исполнительного органа блока /6/, который жестко связан с внешним, по отношению к предлагаемому имитатору, устройством индикации.
В современных имитаторах и тренажерах /см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ - М.: Воениздат, 1980, с. 57-106/ функции имитации целей и помех возлагается на ЭВМ /вычислитель/, которая получает координаты азимутального положения луча радиально-круговой развертки индикатора тренажера /код Па/ и сравнивает это значение с координатами целей и помех, хранимых в памяти ЭВМ и подлежащих отображению на экране индикатора.
В предлагаемом имитаторе угла поворота выход счетчика /2/ является выходом устройства, с которого текущее значение угла поворота в виде параллельного двоичного кода Па поступает в вычислитель тренажера. Реализация блока отработки азимута /6/ по схеме следящей системы /см. Артамонов В.Н. Следящие системы радиолокационных станций автоматического сопровождения и управления. - Л.: Судостроение, 1969, с. 100-429/ позволяет обеспечить слежение угла поворота вала по отношению к мгновенному /текущему/ значению кода Па с ошибкой не хуже /1÷3/'. В процессе работы с помощью датчика скорости /4/ и датчика сектора /7/ могут задаваться любые другие из числа реализуемых в имитаторе угла поворота значения скорости изменения азимута, пеленг биссектрисы и размер сектора, а также осуществляется переход с ручного управления на автоматическое управление и наоборот.
При использовании имитатора угла поворота в качестве составной части комплексного тренажера, выход "Вал Па" блока отработки азимута /5/ может быть подключен /см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 60-64/ к валу ротора "СКВТ" и тем самим обеспечить техническую реализацию индикатора кругового обзора на базе неподвижной отклоняющей системы.
Функционирование предлагаемого имитатора угла поворота проверено путем макетирования и натурными испытаниями макета имитатора.
Предлагаемый имитатор угла поворота антенны РЛС по сравнению с известными имитаторами такого же назначения /"Имитатор угла поворота" и "Формирователь импульсов начала и конца сектора сканирования" см. Романов А.Н. Тренажеры для подготовки операторов РЛС с помощью ЭВМ. - М.: Воениздат, 1980, с. 61-62, 99-100; "Цифровой имитатор угла поворота" по пат. 118517, Польша/ обладает тем существенным отличием, что позволяет повысить степень выучки оператора РЛС навыкам ее боевой эксплуатации, так как при реализации предлагаемого имитатора угла поворота в тренажере, будут учтены особенности режима работы реальной антенны, а именно: секторный и круговой режимы изменения угла поворота с учетом оперативного управления размером сектора и пеленгом биссектрисы сектора, направлением и скоростью изменения угла поворота антенны по азимуту. Это достигается благодаря вновь введенным устройствам и связям. Дополнительно введенные устройства просты, дешевы и технически просто реализуются на известных схемах /элементах/ цифровой и аналоговой техники.
Имитатор угла поворота будет использован в тренажере, предназначенном для обучения операторов РЛС навыкам их боевой эксплуатации. При использовании предлагаемого имитатора угла поворота ожидается расширение функциональных возможностей устройства и, как следствие, повышение выучки операторов по обнаружению объектов-целей и определению их координат в кратчайшее время и на предельной дальности в условиях многообразия возможных тактических ситуаций.
Испытание макета имитатора угла поворота подтвердили его высокую эффективность с точки зрения расширения функциональных возможностей устройства с учетом обеспечения секторного и кругового режимов изменения угла поворота при оперативном управлении размером и пеленгом биссектрисы сектора, направлением и скоростью изменения угла поворота по азимуту. Все это в конечном счете приводит к повышению степени выучки операторов РЛС навыкам их боевой эксплуатации, а именно:
- выбирать наилучший план поиска цели по азимуту, обеспечивающий из многих возможных такой план действия, который приводит к обнаружению цели в кратчайшее время и на предельной дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841103A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1987 |
|
SU1841002A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1988 |
|
SU1841093A2 |
| Тренажер оператора радиолокационных систем | 1981 |
|
SU976471A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1987 |
|
SU1841027A2 |
| Имитатор бортовой навигационной радиолокационной станции | 1965 |
|
SU665391A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
Изобретение предназначено для обучения операторов радиолокационных станций. Достигаемый технический результат - повышение достоверности имитации сканирования антенны с различными скоростями в заданном угловом секторе. Указанный результат достигается за счет того, что имитатор содержит генератор импульсов, реверсивный счетчик, делитель частоты, датчик скорости, коммутатор, блок отработки азимута, датчик сектора, регистр, сумматор, вычитатель, две схемы сравнения, триггер, три дизъюнктора и два конъюнктора. Перечисленные средства определенным образом соединены между собой. 1 ил.
Имитатор угла поворота антенны РЛС, содержащий генератор импульсов, реверсивный счетчик и делитель частоты, отличающийся тем, что, с целью повышения достоверности имитации сканирования антенны с различными скоростями в заданном угловом секторе, в него введены датчик скорости, коммутатор, блок отработки азимута, датчик сектора, регистр, сумматор, вычитатель, две схемы сравнения, триггер, три дизъюнктора и два конъюктора, причем выход генератора импульсов соединен со входом делителя частоты, М выходов которого соединены с первыми М входами коммутатора, вторые М входов которого соединены с первыми М выходами датчиками скорости, а выход, - через реверсивный счетчик соединен со входом блока отработки азимута, входом регистра и первым входами двух схем, сравнения, второй выход датчика скорости через соединенные последовательно первый дизъюнктор, инвертор, первый конъюнктор и второй дизъюнктор соединены с управляющим входом реверсивного счетчика, третий выход датчика скорости соединен со вторыми входами первого и второго дизъюнкторов, выход регистра соединен с первыми входами сумматора и вычислителя, вторые входы которых соединены с первыми выходами датчика сектора, второй выход которого соединен с управляющим входом регистра и через последовательно соединенные второй конъюнктор, третий дизъюнктор и триггер - со вторым входом первого конъюнктора, выход триггера соединен со вторым входом второго конъюнктора, выход сумматора соединен со вторым входом третьего дизъюнктора, а выход вычитателя через вторую схему сравнения соединен с третьим входом третьего дизъюнктора.
| А.И | |||
| Романов, Тренажеры для подготовки операторов РЛС с помощью ЭВМ - М., Воениздат, 1980 г | |||
| Способ изготовления металлокерамических лежек для пода нагревательных печей | 1958 |
|
SU118517A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

