Предлагаемое изобретение относится к области измерения статистических характеристик полей жидкости, в частности к измерителям мгновенных значений гидрологических характеристик, и может быть использовано в подводной локации в интересах организации систем противодиверсионной обороны (ПДО) для обнаружения движущихся в погруженном положении в режиме полного молчания (т.е. в режиме отсутствия излучения ими энергии в ИК-, радио-, оптическом и акустическом диапазонах волн) малоразмерных нешумящих объектов типа подводных диверсионных средств и сил - ПДСС (боевые пловцы - БП, средства их доставки, малые - МПЛ и сверхмалые - СМПЛ подводные лодки и другие морские малые боевые средства - МБС), в состав технических средств обеспечения которых входят портативные переносные гидроакустические средства (ГАС) с пассивным и активным режимами работы.
Известные устройства, обеспечивающие обзор сплошного поля наблюдения и измерения локальных изменений гидрологических и других характеристик жидкости, основанные на определении оптических локальных аномалий на свободной поверхности.
Все эти устройства объединяет то, что они измеряют либо регулярные (осредненные), либо нерегулярные (пульсационные) гидрологические характеристики жидкости.
В то же время всем этим устройствам присущи и общие недостатки.
Основным недостатком первых двух типов устройств является то, что они применимы для обнаружения только АПЛ.
Основным недостатком устройств III и IV типов является то, что они не эффективны при волнении моря из-за резких уменьшений и искажений регистрируемых локальных аномалий в силу диссипации последних, вызванной морским волнением, а устройства IV типа ночью практически не применимы.
Известен также гидролокационный модуль (ГЛМ) для системы определения гидроакустических характеристик в анализируемом поле жидкости [1], предназначенной для пассивного обнаружения, определения местоположения и сопровождения целей, создающих шумы.
Это устройство по своему функциональному назначению наиболее близко к предлагаемому, выбрано в качестве прототипа и состоит из решетки K подводных звуковых приемников - в качестве которых применены гидролокационные преобразователи (ГЛП), удаленные друг от друга на заданные расстояния, блока входных усилителей, коммутатора, с помощью которого выбирают и индивидуально контролируют выходные сигналы каждого элемента решетки ГЛП, блока сопряжения с внешним устройством обработки и индикации и полосового фильтра, с помощью которого к коммутатору подсоединен блок сопряжения.
При этом выходы ГЛП соединены со входами блока входных усилителей, выходы которого подключены ко входу коммутатора. Последовательно с коммутатором соединены полосовой фильтр и блок сопряжения, вход последнего подключен к внешнему устройству обработки и индикации.
Устройство работает следующим образом.
Выходные сигналы ГЛП по линии связи подают через блок входных усилителей на коммутатор для селективного прослушивания и измерения выходного сигнала индивидуальных ГЛП. С выхода коммутатора сигнал подают на вход полосового фильтра, который содержит переключатель диапазонов для пропускания выбранных частот.
Сигнал с выхода полосового фильтра подают через блок сопряжения во внешний канал связи с внешним устройством обработки и индикации. При превышении интенсивности сигнала порога детектирования во внешнем устройстве обработки и индикации судят о наличии в контролируемом ГЛМ пространстве источника шума, а по величине сигнала определяют как расстояние до источника шумов, так и направление на него по отношению к элементам решетки подводных ГЛП, составляющей вместе с блоком входных усилителей, коммутатором и блоком сопряжения единый гидролокационный модуль освещения подводной обстановки (ОПО).
Однако упомянутый ГЛМ практически не может быть использован как для обнаружения целей типа ПДСС, движущихся в погруженном положении в режиме полного молчания, так и объемных крупных малошумящих (или практически для данного модуля бесшумных) подводных объектов.
Практически обнаружение, например, БП традиционными ГАС в пассивном режиме возможно только в том случае, когда входящие в состав технических средств обеспечения боевого пловца ГАС переключают хотя бы кратковременно на активный режим работы.
Поэтому упомянутый ГЛМ обладает еще одним существенным недостатком, заключающимся в том, что после обнаружения БП (если, разумеется, оно осуществлено) в пассивном режиме для его классификации и уточнения местоположения необходимо использовать активный режим локации.
Но в этом случае произойдет демаскировка средств освещения подводной обстановки, что позволит вероятному противнику принять доступные ему контрмеры как в целях выполнения своей боевой задачи в целом, так и направленные на вывод из строя средств освещения подводной обстановки.
Целью настоящего изобретения является обеспечение пассивного обнаружения, определения местоположения и сопровождения малошумящих или практически бесшумных для традиционных пассивных гидролокационных средств и систем целей типа ПДСС в ограниченных акваториях (узкости, якорные стоянки внешних и внутренних рейдов и т.д.) за счет создания сплошного комбинированного (гидроакустического и гидрофизического) поля наблюдения и дополнительного измерения в созданном поле малых локальных изменений гидрологических характеристик гидрофизического поля жидкости, обусловленных движением в погруженном положении целей.
Любое движущееся в погруженном положении тело вызывает в направлении своего движения волновые колебания окружающей среды, вызывающие локальные изменения гидрологических характеристик жидкости.
У обтекаемых, удлиненных (цилиндрических) тел первоначальное локальное изменение гидрологических характеристик жидкости в направлении их движения представляет довольно узкую область (фиг. 1 - пунктирная линия) радиусом, соизмеримым с радиусом мидельсечения тела.
Однако под действием явления переноса количества движения область гидродинамических особистостей ΔW ограничивается телом вращения вокруг оси OX кривой ОСАДО (фиг. 1 - сплошная линия), представляющей собой вытянутую кардиоиду [1].
Процесс взаимодействия элементов гидродинамической системы "тело - жидкость" приводит к изменению движения системы как целого и измененного статистической структуры гидрофизического поля жидкости, в том числе к изменению импульса переноса (количества движения). Это в свою очередь приводит к нарушению установившейся системы квазистационарных условий в объеме ΔW, формы и размеры которого определяются характеристиками явления переноса, мощностью источника возмущений (в частности, движителя БП) и коэффициентами затухания вынужденных, направленных волновых колебаний.
При таком подходе задача обнаружения движущихся в погруженном положении в режиме полного молчания малоразмерных целей сводится к выявлению локальных изменений статистических характеристик гидрофизических полей жидкости в контролируемой ГЛМ акватории путем создания дополнительно сплошного поля гидрофизического наблюдения в упомянутой акватории.
Поэтому в основу построения предлагаемого ГЛМ положены:
- явление изменения количества движения, обусловленное взаимодействием движущегося в погруженном положении твердого тела с жидкой средой,
- способ пассивного обнаружения подводных целей [2];
- гидрофизические особистости и закономерности, на основе которых построен измеритель малых изменений количества движения - гидрофизический преобразователь (ГФП) [3].
Для достижения поставленной цели в известном гидролокационном модуле, содержащем решетку, состоящую из K гидролокационных преобразователей (ГЛП), блок входных усилителей, коммутатор и блок сопряжения; выходы ГЛП подключены к соответствующим входам блока входных усилителей, выходы которого подключены ко входам коммутатора, а выход блока сопряжения подключен к внешнему устройству обработки и индикации в качестве ГЛП применены K-1 ГФП и один ГАП, между выходом коммутатора и входом блока сопряжения включено устройство управления и преобразования, содержащее блок выборки-хранения, блок управления, компаратор, цифроаналоговый преобразователь и формирователь сигнала сброса, а выход упомянутого блока сопряжения является одновременно входом управления, при этом первый вход блока выборки-хранения подсоединен к выходу коммутатора, второй - к выходу "строб хранения", блока управления, а выход к неинвертирующему входу компаратора, инвертирующий вход которого подсоединен к выходу цифроаналогового преобразователя, вход последнего соединен с выходом "параллельный код" блока управления, выход компаратора соединен со входом "результат сравнения" блока управления, выход "номер канала" которого соединен с соответствующим ему входом коммутатора, "последовательный выход" блока управления подключен к соответствующему входу блока сопряжения, "последовательный выход" которого подключен к соответствующему входу блока управления, вход "начальная установка" блока управления соединен к выходу формирователя сигнала сброса, а выход блока сопряжения к внешнему устройству обработки и индикации является выходом гидролокационного модуля и одновременно его входом управления.
Кроме того, блок сопряжения содержит передатчик-модулятора сигналов к внешнему устройству обработки и индикации и приемник-демодулятор, сигналов из внешнего устройства обработки и индикации, при этом вход управления блока сопряжения является входом приемника-демодулятора, к которому подключен выход передатчика-модулятора, вход последнего является "последовательным входом" блока сопряжения, а выход приемника-демодулятора является "последовательным выходом" блока сопряжения.
Кроме того, K-1 ГФП сгруппированы в линейку, образуя гидрофизическую решетку типа "линейный барьер", а один (K-й) ГАП с шириной диаграммы направленности, равной длине упомянутой решетки, расположен по нормали к центру последней так, чтобы диаграмма направленности ГАП полностью перекрывала область поля сплошного гидрофизического наблюдения, контролируемую гидрофизической решеткой.
Такое построение гидролокационного модуля позволяет осуществить обнаружение, определение местоположения и сопровождение малошумящих или бесшумных для традиционных пассивных ГАС целей типа ПДСС в ограниченных акваториях за счет создания сплошного комбинированного (гидроакустического и гидрофизического) поля наблюдения и дополнительного по сравнению с прототипом измерения в созданном поле малых локальных изменений гидрологических характеристик гидрофизического поля жидкости, обусловленных взаимодействием движущихся в погруженном положении малоразмерных объектов типа ПДСС с жидкой средой.
Это обеспечивает пассивное обнаружение упомянутых объектов, определение их местоположения и сопровождение в контролируемой акватории.
В конечном итоге предлагаемый модуль позволит обеспечить надежный обзор подводной обстановки в интересах организации эффективной противодиверсионной обороны как морских рубежей, так и стратегических морских и прибрежных объектов.
Все признаки в заявляемом устройстве известны порознь, но в той совокупности, в которой они заявлены в предложенном техническом решении, не встречаются ни в аналогах, ни в прототипе.
Поэтому предложенное техническое решение соответствует критериям "новизна" и "существенное отличие".
Сущность изобретения поясняется чертежами, где изображено:
- на фиг. 1. Область гидрофизических особистостей, обусловленных взаимодействием элементов системы "тело-жидкость";
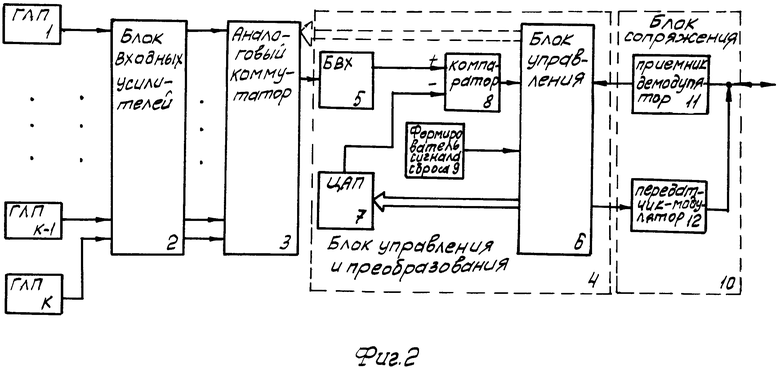
- на фиг. 2. Схема функциональная гидролокационного модуля;
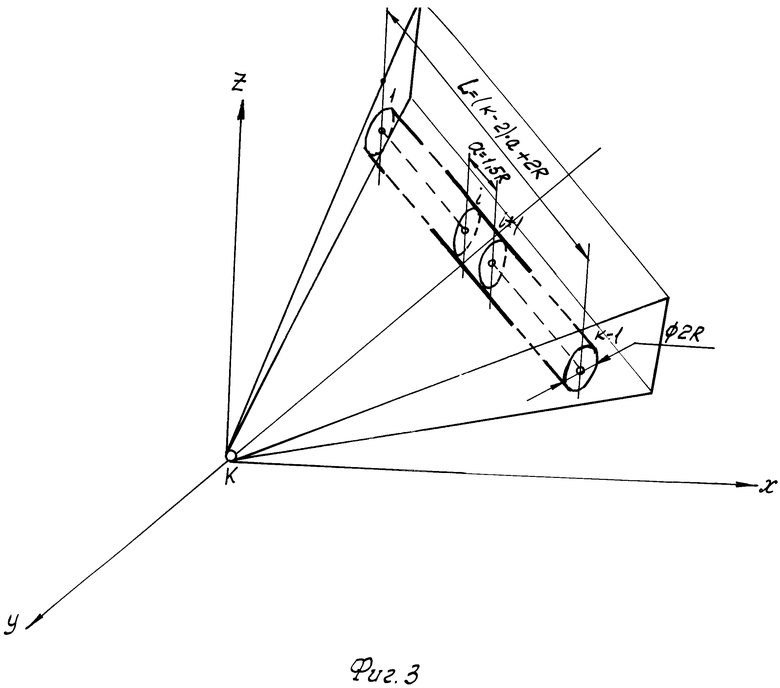
- на фиг. 3. Гидролокационная решетка типа "линейный барьер", схема расположения ГЛП;
- на фиг. 4. Входные сигналы команд ГЛМ;
- на фиг. 5. Формат команды ГЛМ;
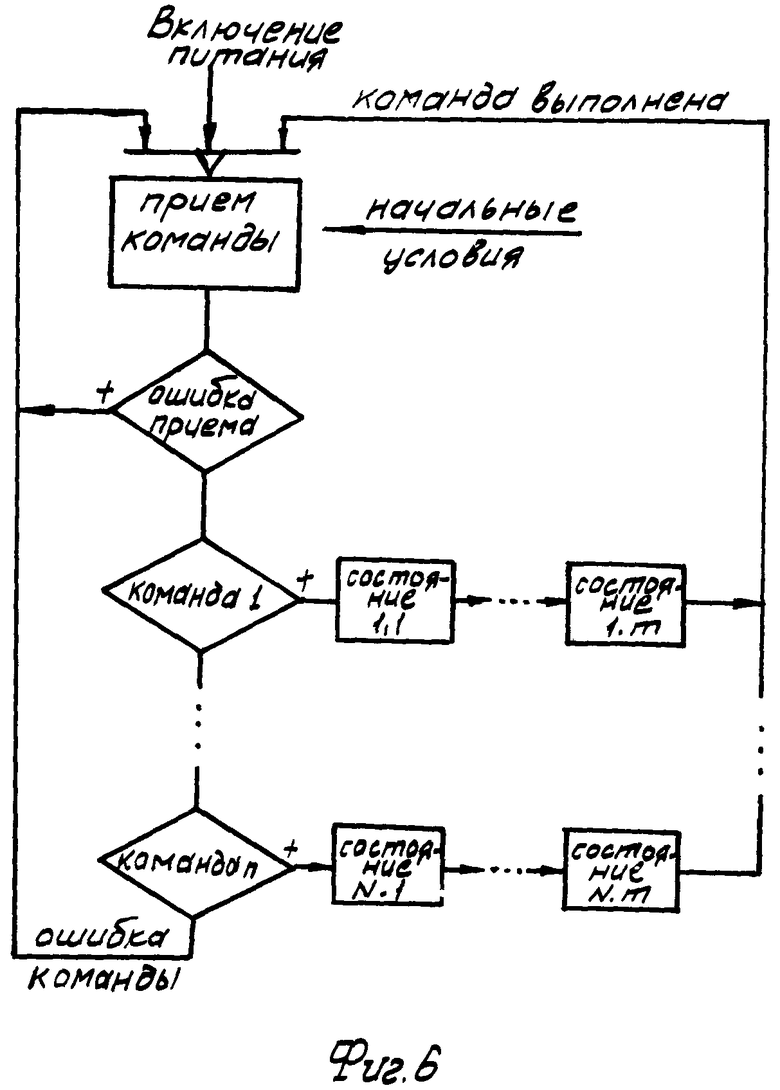
- на фиг. 6. Обобщенный алгоритм функционирования ГЛМ;
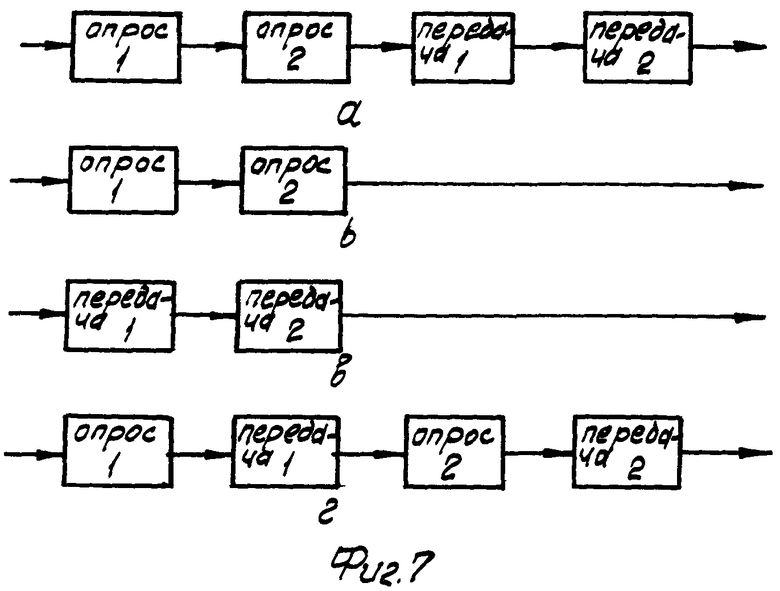
- на фиг. 7. Примеры последовательностей элементарных действий;
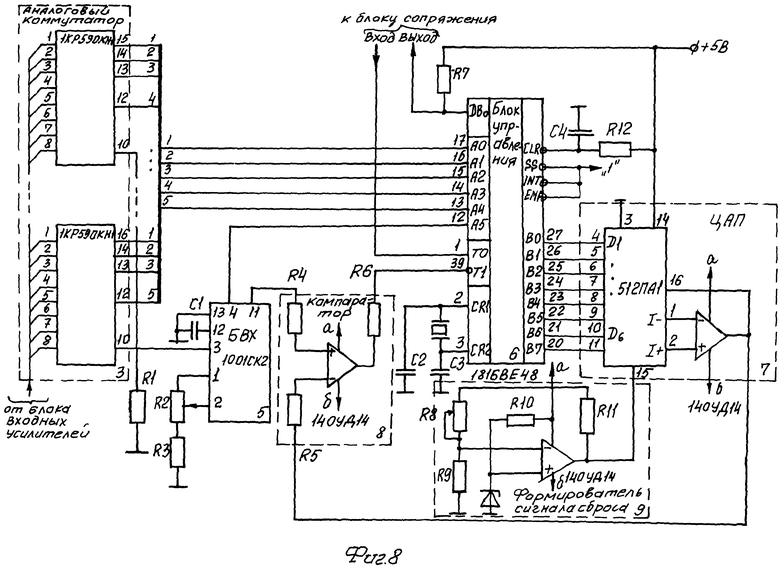
- на фиг. 8. Схема принципиальная электрическая ГЛМ;
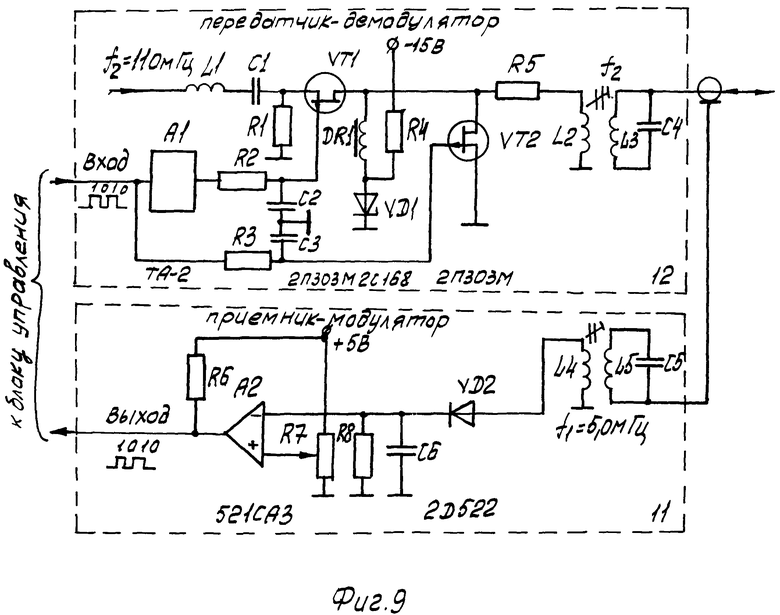
- на фиг. 9. Блок сопряжения, схема принципиальная электрическая;
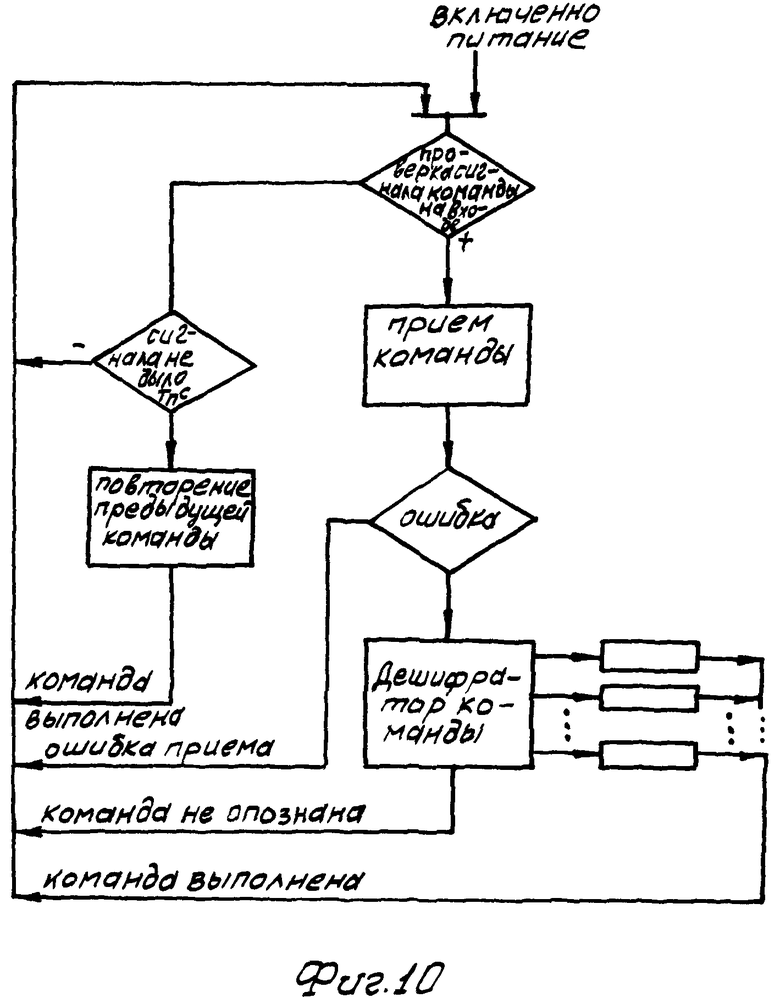
- на фиг. 10. ГЛМ, обобщенный алгоритм работы при подключении стандартного дисплея;
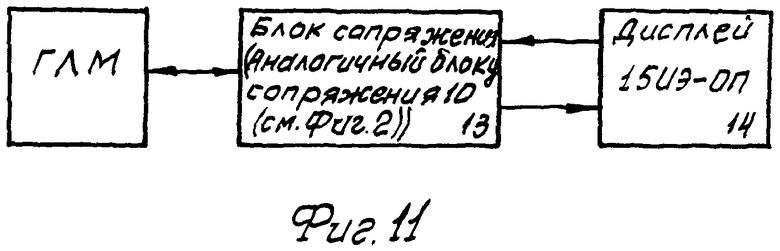
- на фиг. 11. Схема подключения стандартного дисплея типа 15ИЭ-017 к внешнему каналу ГЛМ.
Заявляемый гидролокационный модуль (фиг. 1, 2, 3, 8) содержит гидролокационную решетку типа "линейный барьер", состоящую из K-1 ГФП-1…(K-1) и одного ГАП-К, блок входных усилителей - 2, собранный на K микросхемах 140УД17; коммутатор - 3, например, аналоговый (АК), собранный на микросхемах КР530КМ1; устройство управления и преобразования - 4, состоящее из блока выборки-хранения (БВХ) - 5, собранного на микросхеме 1001СК2, блока управления - 6, собранного на микросхеме 1816ВЕ48, цифроаналогового преобразователя (ЦАП) - 7 собранного на микросхеме 572 ПА-1, компаратора - 8 собранного на микросхеме 140УД14 и формирователя сигнала сброса - 9 собранного на микросхеме 140УД14; блок сопряжения - 10, содержащий приемник-демодулятор сигналов - 11 и передатчик-модулятор сигналов - 12, подключенные к внешнему устройству обработки и индикации.
К выходу каждого ГЛП подключена своим входом одна из K микросхем, входящих в блок входных усилителей - 2, а количество микросхем в АК-3 (при восьми входах каждая) равно N=K:8 с окружением до целого числа в сторону увеличения.
Выходы ГЛП 1…K через блок входных усилителей - 2 подключены ко входам аналогового коммутатора АК-3.
Выход АК-3 подсоединен ко входу БВХ - 5, второй вход которого соединен с выходом "строб-хранения" блока управления 6, а выход к неинвертирующему входу компаратора - 8, инвертирующий вход последнего подсоединен к выходу ЦАП - 7. Вход ЦАП - 7 соединен с выходом "параллельный код" блока управления - 6, а выход компаратора 8 соединен со входом "результат сравнения" блока управления 6, выход "номер канала" которого соединен с соответствующим ему входом АК-3.
"Последовательный выход" блока управления 6 подключен к соответствующему входу блока сопряжения - 10, "последовательный выход" которого подключен к соответствующему входу блока управления - 6.
Вход "начальная установка" блока управления - 6 подсоединен к выходу формирователя сигнала сброса - 9, а выход блока сопряжения - 10 к внешнему устройству обработки и индикации является выходом ГЛМ и одновременно его входом управления.
Расстояние между каждым ГФП в линейке равно a=1,5R (где R - ожидаемый радиус мидельсечения области ΔW). Таким образом, длина решетки типа "линейный барьер" составляет L=(K-2)a+2R. Область сплошного поля гидрофизического наблюдения представляет собой цилиндр уверенного приема радиуса R и длиной L. По нормали к центру оси линейки ГФП расположен K-й элемент решетки - ГАП так, чтобы его диаграмма направленности полностью перекрывала область уверенного приема гидрофизических сигналов.
Предлагаемый гидролокационный модуль работает следующим образом.
Сигналы с выходов ГЛП подают на соответствующие входы блока входных усилителей 2, с выходов которых эти сигналы поступают на входы АК-3 (фиг. 2, 3).
После обнаружения возможной цели одним из первых K-1 элементов (ГФП) решетки АК-3 по команде от блока управления 6 переключают с последовательного на адресный опрос, при этом K-й элемент (ГАП) решетки контролируют постоянно.
Показания снимают для каждого из опрашиваемых элементов при адресном опросе, а элемент с наиболее мощным сигналом выбирают в качестве исходного. Для определения направления на источник возмущения, т.е. возможную цель выбирают в качестве фокальных точек не менее двух из первых K-1 элементов решетки, сигналы на выходе которых имеют наибольшую амплитуду.
Дальнейшая обработка информации в ГЛМ осуществляют следующим образом.
После подачи питающего напряжения с формирователя сигнала сброса 9 подают сигнал начальной установки на блок управления - 6 устройства управления и преобразования - 4, который при этом переходит в режим приема команды из внешнего устройства обработки и индикации в виде амплитудно-манипулированного радиосигнала с частотой f1 (фиг. 4а), который подают на вход приемника-демодулятора - 11, выходной сигнал которого в виде последовательности импульсов (битов) с уровнями ТТЛ-логики (фиг. 4б) подают на вход "последовательный вход" блока управления 6.
Команда представляет собой последовательность битов (фиг. 5), которая состоит из стартового бита с уровнем "1", восьми информационных бит, бита контроля на четность, принимающего значение "1", если в информационном поле содержится четное число бит с уровнем "1" и значение "0" в противном случае, и двух стоповых бит с уровнем "0", т.е. общая длина команды равна 12 бит.
Режим приема команды является начальным состоянием блока 6. В этом режиме блок управления - 6 производит программный опрос входа команды. Программа распознает стартовый бит, преобразует последовательность битов информационного поля в параллельный 8-разрядный код команды и в соответствии со значением бита контроля на четность производит проверку принятой команды.
Если результат проверки отрицательный (ожидаемое значение контрольного бита не соответствует фактическому), то блок управления 6 переходит в начальное состояние.
В противном случае содержимое информационного поля команды определяет дальнейшие функционирование блока управления - 6, а следовательно, и реакцию ГЛМ на принятую команду в целом.
Обобщенный алгоритм функционирования ГЛМ приведен на фиг. 6. Из начального состояния блок управления 6 переводят в промежуточное состояние дешифрации команды и в случае успешной дешифрации (опознавания) команды выполняет заданную командой последовательность действий двух типов, заключающейся в опросе ГЛП и передаче снятой с опрашиваемых ГЛП информации во внешнее устройство обработки и индикации.
Набор возможных элементарных действий ограничен и их общее число составляет 2K. Конкретные наборы действий, задаваемые командами, определяются схемой размещения опрашиваемых ГЛП (ГФП и ГАП) в пространстве.
Общим правилом является группирование действий опроса ГЛП и действий передачи во внешнее устройство обработки и индикации, т.е. отсутствие чередования действий в команде.
Примеры допустимых последовательностей приведены на фиг.7а, б, в; не допустимой - на фиг. 7г.
Выполнение действия "опрос ГЛП" заключается в том, что блок управления - 6 выдает код номера опрашиваемого ГЛП на адресный вход АК-3 ("номер канала"). Через время Туст, определяемое параметрами применяемых схем АК-3 и БВХ-5 (типовое значение Туст=3 мкс), на выходе БВХ-5 получают установившееся значение напряжения, блок управления - 6 выдает на вход БВХ-5 "строб хранения" и начинает цикл аналого-цифрового преобразования по алгоритму последовательного уравновешивания, для чего:
1. выдают код на вход ЦАП - 7, содержащий во всех разрядах нули (соответствующий нулевому выходному напряжению). Сигнал с выхода ЦАП - 7 сравнивают с выходным в компараторе - 8;
2. проверяют значение выходного сигнала компаратора - 8 и формируют значение старшего разряда результата (промежуточный код, содержащий в остальных разрядах нули);
3. выдают промежуточный код на вход ЦАП - 7;
4. проверяют значение выходного сигнала компаратора - 8 и формируют значение предыдущего (по старшинству) разряда результата (промежуточный код).
Общее время опроса всех ГЛП Топр равно
Топр.=K(Туст+МТт),
где М - разрядность цифроаналогового преобразователя 7,
Тт - длительность такта.
При М=8, Туст=Тт=3 мкс.
Топр=K(3+8·3)=27K мкс.
Далее (М-2) раза повторяют действия 3 и 4, в результате чего формируют результирующий код с разрядностью М, соответствующий значениям входных напряжений K гидролокационных преобразователей.
Общее количество тактов преобразования равно М. Длительность такта Тт определяют суммой времен установления ЦАП-7 и компаратора - 8. Типовое значение Тт равно 3 мкс, таким образом, время опроса одного ГЛП равно 3 мкс.
Выполнение действия типа "передача информации" заключается в преобразовании кода напряжения, полученного при опросе ГЛП в последовательность импульсов с форматом, аналогичным формату принимаемой команды (фиг. 5), при этом код напряжения упаковывают в информационное поле.
При М<8 младшие разряды информационного поля заполняют нулями. При 8<М<16 для передачи кода напряжения необходимы две последовательности импульсов. При этом старшие восемь разрядов передают в информационное поле первой последовательности, а младшие разряды, дополненные нулями - в информационное поле второй последовательности.
Сформированные на выходе блока управления - 6 последовательности импульсов подают на вход передатчика-модулятора - 12, где их преобразовывают в амплитудно-манипулированный радиосигнал с частотой f2, который передают во внешнее устройство обработки и индикации.
На фиг. 8 и фиг. 9 показаны возможные варианты схемо-технической реализации устройства управления и преобразования - 4 (с АК-3) и блока сопряжения - 10 соответственно.
Передаваемая во внешнее устройство обработки и индикации информация предназначена для дальнейшей обработки. Однако, если обработка не требуется, то к гидролокационному модулю подключают стандартный дисплей. Это возможно потому, что формат последовательностей входных и выходных импульсов совпадает с форматом сигналов интерфейса ИРПС при незначительном усложнении общего алгоритма работы заявляемого ГЛМ (фиг. 10), организации несколько более сложного преобразования передаваемых во внешние кодов измеренных напряжений и соответствующем выборе скорости передачи информации (фиг. 11).
Команды в этом случае задают с клавиатуры дисплея, а информацию с ГЛМ отображают на его экране в удобной для восприятия форме. Кроме того, возможна организация подачи звукового и светового сигналов. Алгоритм преобразования выходной информации ГЛМ при выполнении операции типа "передача информации" зависит от типа применяемого дисплея.
Предлагаемый гидролокационный модуль создает комбинированное (гидроакустическое и гидрофизическое) поле сплошного наблюдения в заданной акватории, достаточное для эффективного обнаружения движущихся в погруженном положении в режиме полного молчания целей типа ПДСС, особенно при выходе их на предполагаемый рубеж атаки.
Использование предлагаемого гидролокационного модуля в составе систем ПДО приводит к повышению эффективности средств ОПО и повышению эффективности системы ближайшего охранения в целом.
Макетирование отдельных узлов, моделирование работы заявляемого устройства на ЦВМ ЕС-1035, а также экспериментальные исследования макетов подтвердили достижение положительного эффекта.
Заявляемый ГЛМ конструктивно прост, технологичен в изготовлении, прост в эксплуатации, не требует разработки специальной аппаратуры и сложных методик измерения и обработки полученной информации.
Источники информации
1. Способ и устройство для пассивного обнаружения морских целей. Патент США №4173008, опубл. 30.10.79.
2. Князюк А.Н., Скворцов В.В. Способ пассивного обнаружения подводных целей, а.с. СССР №1841085, от 23.03.87.
3. Князюк А.Н., Скворцов В.В. Гидрофизический преобразователь, а.с. СССР №1841084, от 05.01.87.
4. Князюк А.Н., Скворцов В.В. Способ распознавания малоразмерных целей, а.с. СССР №1841026, от 30.11.87.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841089A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ В ПОГРУЖЕННОМ ПОЛОЖЕНИИ ОБЪЕКТА | 1987 |
|
SU1841085A1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1988 |
|
SU1841054A1 |
| ГИДРОФИЗИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1987 |
|
SU1841084A1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841055A1 |
| Зондирующий комплекс профиля скоростей течения | 1982 |
|
SU1070484A1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| ОБНАРУЖИТЕЛЬ ГИДРОЛОКАЦИОННЫХ СИГНАЛОВ | 1988 |
|
SU1841095A1 |


Изобретение относится к области измерения статистических характеристик полей жидкости и может быть использовано для измерения мгновенных значений гидрологических характеристик в системах подводной локации. Сущность: устройство содержит решетку из гидролокационных преобразователей (1), блок (2) входных усилителей, коммутатор (3), блок (4) управления и преобразования, блок (10) сопряжения, подключенный к внешнему устройству обработки и индикации. При этом в качестве гидролокационных преобразователей (1) применены гидрофизические преобразователи и один гидроакустический преобразователь. Блок (4) управления и преобразования содержит блок (5) выборки-хранения, блок (6) управления, цифроаналоговый преобразователь (7), компаратор (8) и формирователь (9) сигнала сброса. Блок (10) сопряжения содержит приемник-демодулятор (11) и передатчик-модулятор (12). Технический результат: повышение вероятности обнаружения целей за счет создания комбинированного (гидроакустического и гидрофизического) поля наблюдения. 2 з.п. ф-лы, 11 ил.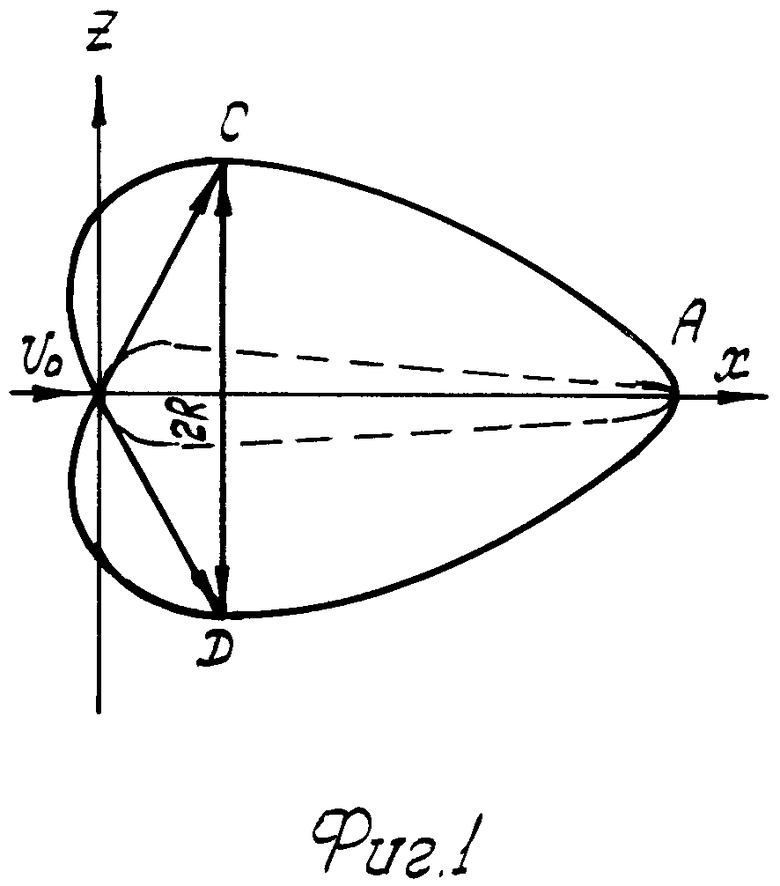
1. Гидролокационный модуль, содержащий решетку, состоящую из K гидролокационных преобразователей, блок входных усилителей, коммутатор и блок сопряжения, выходы гидролокационных преобразователей подключены к соответствующим входам блока входных усилителей, выходы которого подключены ко входам коммутатора, а выход блока сопряжения подключен к внешнему устройству обработки и индикации, отличающийся тем, что, с целью повышения вероятности обнаружения, за счет создания сплошного комбинированного (гидроакустического и гидрофизического) поля наблюдения, в нем в качестве гидролокационных преобразователей применены K-1 гидрофизических преобразователей и один гидроакустический преобразователь, к выходу коммутатора подключено устройство управления и преобразования, содержащее блок выборки-хранения, блок управления, компаратор, цифроаналоговый преобразователь и формирователь сигнала сброса, при этом первый вход блока выборки-хранения подсоединен к выходу коммутатора, второй вход - к выходу "строб-хранение" блока управления, а выход к неинвертирующему входу компаратора, инвертирующий вход компаратора соединен с выходом цифроаналогового преобразователя, вход последнего с выходом "параллельный код" блока управления, выход компаратора соединен со входом "результат сравнения" блока управления, выход "номер канала" блока управления соединен с соответствующим входом коммутатора, "последовательный выход" блока управления подключен к соответствующему входу блока сопряжения, "последовательный выход" которого подключен к соответствующему входу блока управления, вход "начальная установка которого соединен с выходом формирователя сигнала сброса.
2. Гидролокационный модуль по п. 1, отличающийся тем, что блок сопряжения выполнен в виде передатчика-модулятора сигналов к внешнему устройству обработки и индикации и приемника-демодулятора сигналов из внешнего устройства обработки и индикации, при этом вход управления блока сопряжения является входом приемника-демодулятора, к которому подключен выход передатчика-модулятора, вход последнего является "последовательным входом" блока сопряжения, а выход приемника-демодулятора является "последовательным выходом" блока сопряжения.
3. Гидролокационный модуль по п. 1, отличающийся тем, что K-1 гидрофизических преобразователей сгруппированы в линейку, образуя гидрофизическую решетку типа "линейный барьер", а один гидроакустический преобразователь расположен на нормали к центру последней так, чтобы диаграмма направленности гидроакустического преобразователя полностью перекрывала область поля сплошного гидрофизического наблюдения, формируемого гидрофизической решеткой.
| Патент США 4173008, G01L 7/02, опубл | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |

