Известны динамические стенды для ориентации различных устройств в пространстве при статических и динамических испытаниях на базе подвижных лафетов с применением гидравлических силовых приводов. Однако на них можно испытывать изделия весом не более 3 т.
Предложенный стенд отличается тем, что его грузовая платформа представляет собой понтон, наружная поверхность которого, соприкасающаяся с жидкостью, имеет сферическую, цилиндрическую форму. Внутри понтона находятся механизм центровки в виде двух перекрещивающихся под углом 90° направляющих, жестко связанных с корпусом понтона, и механизм отклонений, в виде траверсы, передвигающейся с помощью расположенного на ней электропривода по круговой опоре в соответствии с программой, задаваемой программным устройством.
По направляющим понтона движутся грузы с автономным приводом, которые устанавливают платформу в горизонтальной плоскости по сигналам с гировертикали на корпусе понтона.
На траверсе расположен груз с автономным приводом, положение которого относительно оси вращения траверсы задается программным устройством.
Такая конструкция стенда позволяет проводить статические и динамические испытания летательных аппаратов больщого веса в собранном виде.
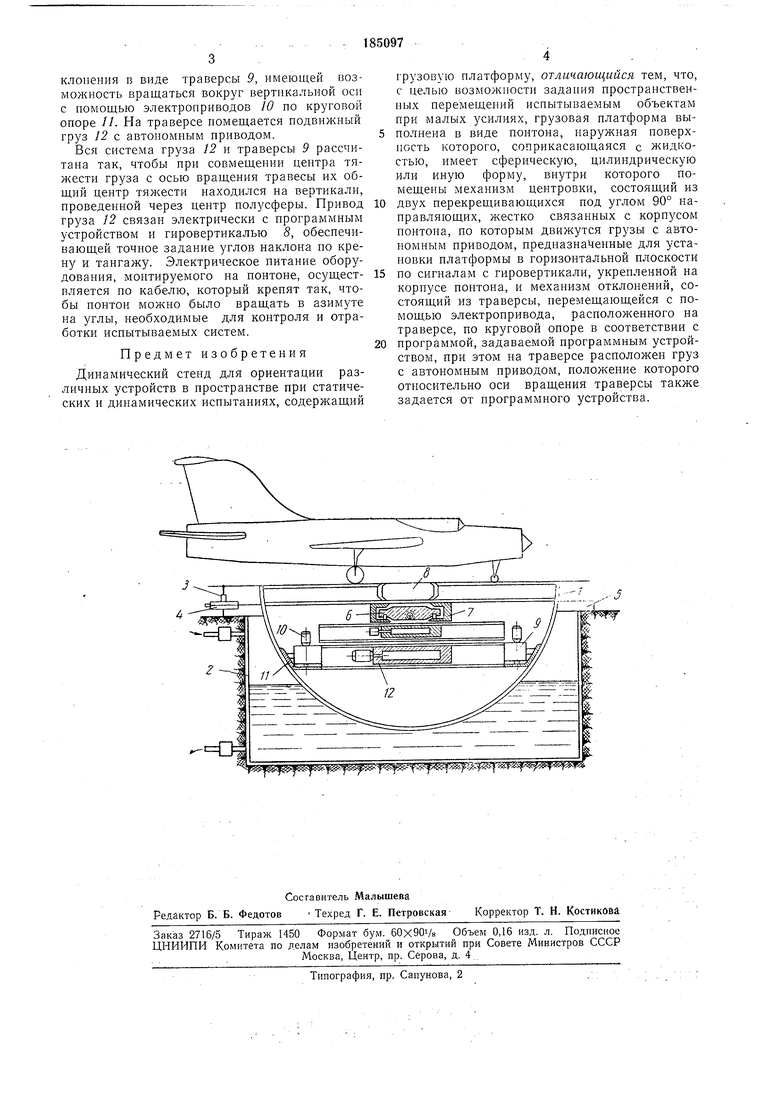
На чертеже изображена конструкция стенда.
Понтон J плавает в щлюзовой камере 2 в виде полусферы, сваренной из стального или дюралюминового листа. Повороты в азимуте задает поитону водило 3, установленное на платформе 4, которая может передвигаться по круговому монорельсу 5.
Ошибки в установке изделия автоматически компенсирует механизм центровки таким образом, чтобы перед началом контроля палуба, а если необходимо, то и линия полета изделия, занимала заранее предусмотренное положение; при этом движение по палубе возможно только по рельсовым желобам.
Механизм центровки представляет собой два груза 6 с автономным приводом, передвигающиеся по неподвижным направляющим 7, которые перекрещиваются под углом 90°.
Приводы грузов механизма центровкн управляются командами, подающимися в случае отклонения палубы понтона от горизонта с гировертикали 8, укрепленной на корпусе понтона. клоиения в виде траверсы 9, имеющей возможность вращаться вокруг вертикальной оси с помощью электроириводов 10 по круговой опоре 11. На траверсе помещается подвижный груз 12 с автопомиым приводом. Вся система груза 12 и траверсы 9 рассчнтаиа так, чтобы при совмещении цеитра тяжести груза с осью вращения травесы их общий центр тяжести находился на вертикали, проведенной через центр полусферы. Привод груза 12 связан электрически с программным устройством и гировертикалью 8, обеспечивающей точное задание углов наклона по крену и тангажу. Электрическое питание оборудования, монтируемого на понтоне, осуществляется по кабелю, который крепят так, чтобы понтон можно было вращать в азимуте на углы, необходимые для контроля и отработки испытываемых систем. Предмет изобретения Динамический стенд для ориентации различных устройств в пространстве при статических и динамических испытаниях, содержащий грузовую платформу, отличающийся тем, что, с целью возможности задания пространственных перемещений испытываемым объектам при малых усилиях, грузовая платформа выполнена в виде понтона, наружная поверхность которого, соприкасающаяся с жидкостью, имеет сферическую, цилиндрическую или иную форму, внутри которого помещены механизм центровки, состоящий из двух перекрещивающихся под углом 90° направляющих, жестко связанных с корпусом понтона, по которым движутся грузы с автономным приводом, предназначенные для установки платформы в горизонтальной плоскости по сигналам с гировертикали, укрепленной на корпусе понтона, и механизм отклонений, состоящий из траверсы, перемещающейся с помощью электропривода, расположенного на траверсе, по круговой опоре в соответствии с программой, задаваемой программным устройством, при этом на траверсе расположен груз с автономным приводом, положение которого относительно оси вращения траверсы также задается от программного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧИЙ КОСМОДРОМ | 2001 |
|
RU2200118C2 |
| САМОХОДНАЯ ПЛАТФОРМА НА ВОЗДУШНОЙ ПОДУШКЕ ДЛЯ ЭКСПЛУАТАЦИИ В АРКТИЧЕСКИХ УСЛОВИЯХ | 2006 |
|
RU2302354C1 |
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОЧНОСТИ ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2013 |
|
RU2527263C1 |
| Плавсредство для транспортировки грузов | 1990 |
|
SU1752647A1 |
| ПЛАВСРЕДСТВО ДЛЯ ОБОРУДОВАНИЯ БРОНЕМАШИН | 2008 |
|
RU2371350C1 |
| Установка для испытания грунтов статической нагрузкой | 1981 |
|
SU998664A1 |
| Судовой трюмный подъемник | 1953 |
|
SU99556A1 |
| СТЕНД ДЛЯ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ИСПЫТАНИЙ | 1970 |
|
SU281867A1 |
| Плавучий кессон-завод | 1983 |
|
SU1188249A1 |
