Известны трехфазные индукционные многополюсные датчики углового положения фазового типа, содержащие роторную и статорную части с обмотками, расположенными вокруг зубцов статора.
Описываемый датчик отличается от известных тем, что в нем статорная часть выполнена в виде совокупности трех зубчатых статоров, на каждом из которых расположена кольцевая обмотка только одной фазы, а его роторная часть выполнена соответственно из трех зубчатых роторов, зубцы каждого из которых сдвинуты отлосите.тьно другого на треть зубцового шага.
Это позволяет повысить коэффициент электрической редукции и увеличить амплитуду выходного сигнала.
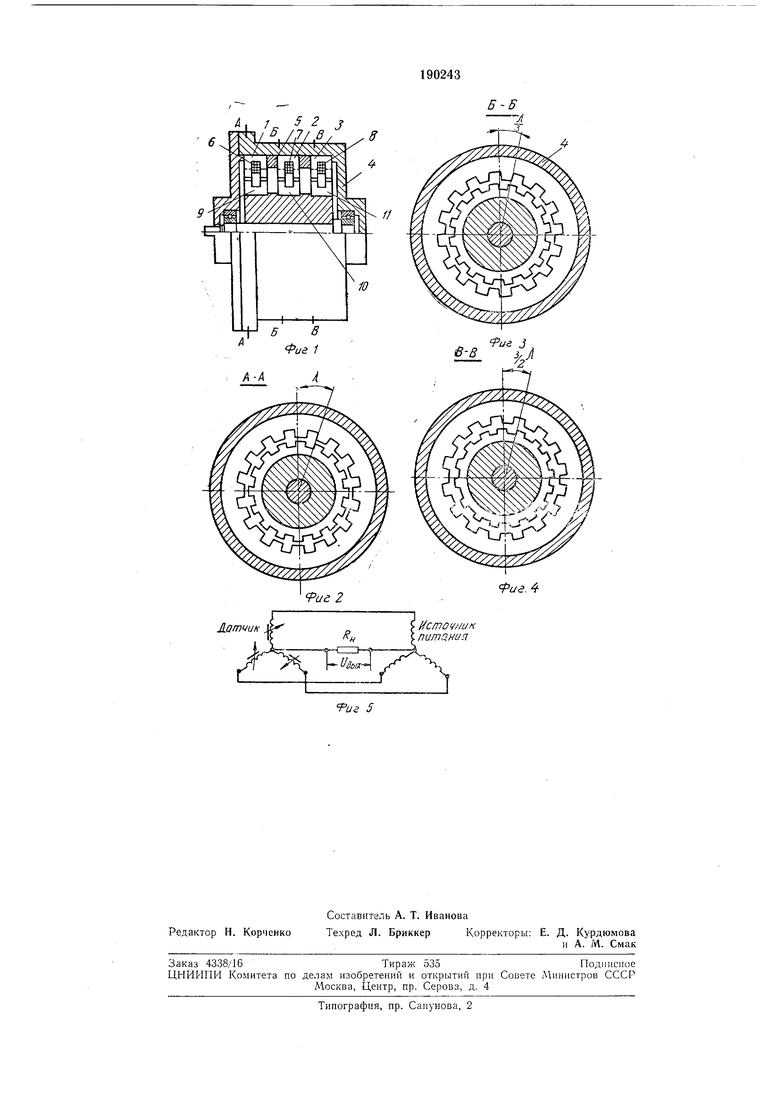
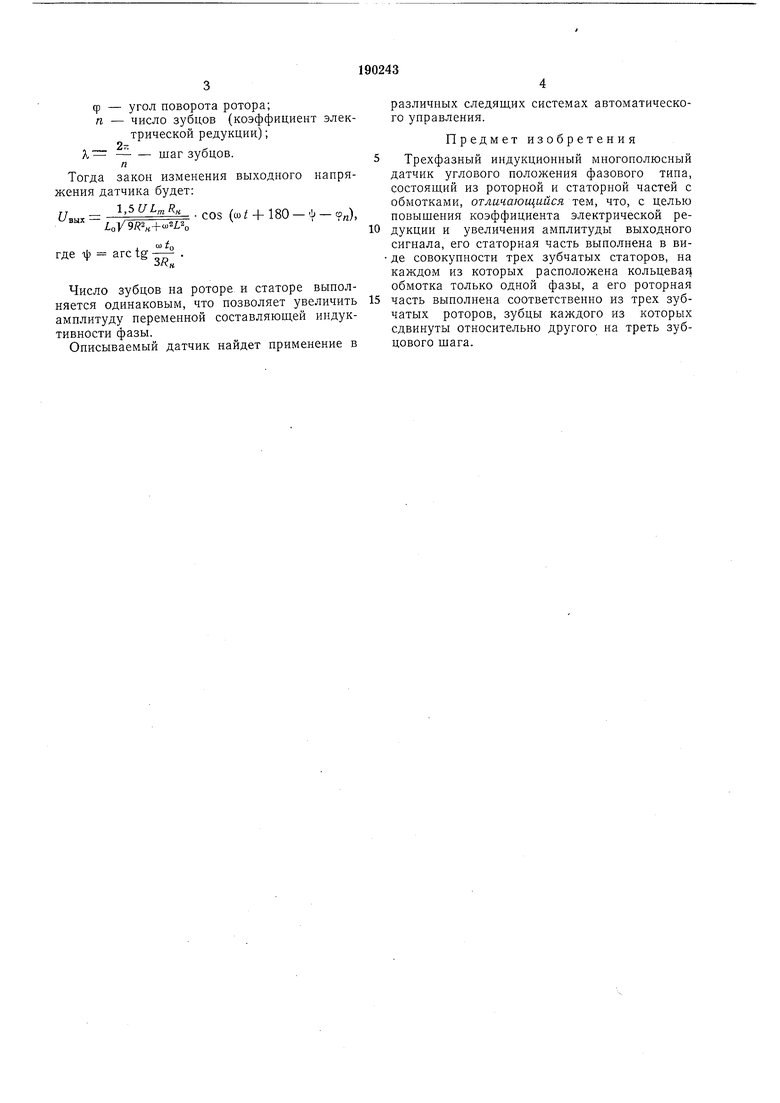
На фиг. 1 показан описываемый датчик; на фиг. 2-4 - иллюстрация сдвигов зубцов каждого ротора относительно другого; на фиг. 5 - схема питания датчика.
Датчик содержит три одинаковых отдельных статора 1, 2 -я 3 (фиг. 1), набранных из трансформаторной стали, установленных в диамагнитном корпусе 4 и разделенных диамагнитными прокладками 5 для разделения магнитных потоков. Обмотки 6, 7 -л 8 каждой фазы располагаются на каладом статоре и выполнены в виде отдельного кольца. Зубцы
статоров при установке их в корпус 4 ставятся в одинаковое положение.
Ротор датчика состоит из трех отдельных секций 9, 10 и 11, выполненных в виде зубчатых цилиндров из мягкой стали и сдвинутых друг относительно друга на треть шага (фиг. 2-4). Кольцевые обмотки 6, 7 и 8 статоров Л 2, 3 соединены в звезду и питаются от трехфазного источника питания (фиг. 5).
0 При повороте ротора датчика на угол в пределах шага /. происходит изменение индуктивных сопротивлений фаз вследствие изменения площади перекрытия между зубцами каждого статора /, 2 и 5 и каждой секции 9,
5 10 и 11 ротора. Подбирая соотношения между шириной паза и шириной зубца и сдвинув зубцы секций ротора друг относительно друга
л на треть щага получим следующий закон
0 изменения индуктивностей фаз статорпых обмоток;
Li LO + L Sin ф „; LZ U + L,,, Зт(ф„ + V3) ;
2 ,.
13 -0 + 1,„-51п(ф„
5
Ф - угол поворота ротора; п - число зубцов (коэффициент электрической редукции);
Л - - шаг зубцов.
Тогда закон изменения выходного напряжения датчика будет:
I Qg + 180 - ) - ср„),
)n
где oj) arc tg
Число зубцов на роторе и статоре выполняется одинаковым, что позволяет увеличить амплитуду переменной составляющей индуктивности фазы.
Описываемый датчик найдет применение в
различных следящих системах автоматического управления.
Предмет изобретения
Трехфазный индукционный многополюсный датчик углового положения фазового типа, состоящий из роторной и статорной частей с обмотками, отличающийся теи, что, с целью повышения коэффициента электрической редукции и увеличения амплитуды выходного
сигнала, его статорная часть выполнена в виде совокупности трех зубчатых статоров, на
каждом из которых расположена кольцевая
обмотка только одной фазы, а его роторная
часть выполнена соответственно из трех зубчатых роторов, зубцы каждого из которых сдвинуты относительно другого на треть зубцового шага.
Л, / 52 J
:-4v44 k iQ s b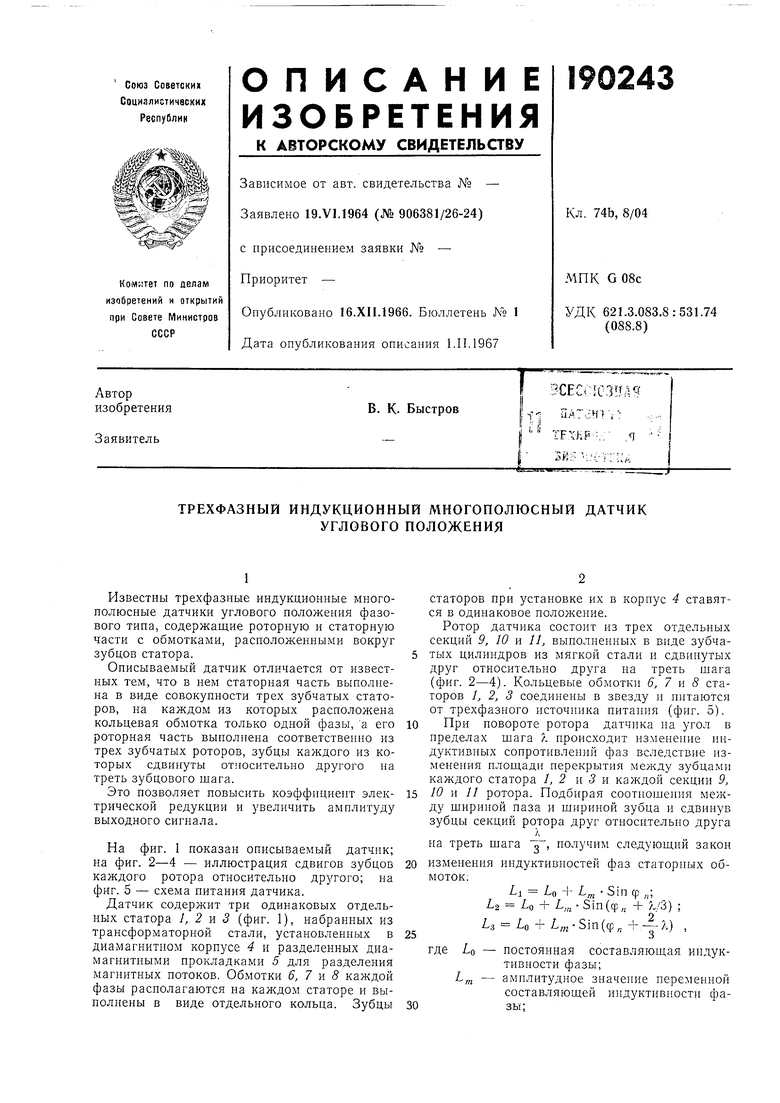
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухфазный двоичный датчик угла | 1978 |
|
SU758411A1 |
| Многополюсный двухфазный датчик угла | 1977 |
|
SU736283A1 |
| Вращающийся трансформатор | 1977 |
|
SU736284A1 |
| ИСПОЛНИТЕЛЬНЫЙ АГРЕГАТ ЭЛЕКТРОПРИВОДА | 2017 |
|
RU2653065C1 |
| Трехфазный синхронный редукторный электродвигатель | 1989 |
|
SU1713032A1 |
| Бесконтактная элекрическая машина | 1971 |
|
SU492020A1 |
| Трехфазный синхронный редукторный электродвигатель | 1989 |
|
SU1737643A1 |
| ТРЕХФАЗНЫЙ ИНДУКТОРНЫЙ ГЕНЕРАТОР | 1966 |
|
SU186013A1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 2012 |
|
RU2497264C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1998 |
|
RU2139622C1 |