Известно устройство для перевода матричных магазинов наборной строкоотливной машины, имеющей несущую магазины раму, раму матрицевыиускающих щтап.г и нриемник матриц, содержащее соединенное с несуН1ей магазины рамой носредством системы рычаго15 зубчатое колесо, которое взаимоде ствует с червяком, посаженным на валу и соединенным с приводом, управляемым датчиком импульсов для перевода магазинов.
Предлагаемое устройство более надежно в действпн. Это достигается тем, что оно снабжено онределяющей т)ебуемое ноложеиие магазинов системой датчпков и двуплечим рычагом, одно плечо которого соединено с рамой матрнцевынускаюп их щтанг, а второе - с прпемником матрин. Червяк жестко посажен на вал, который имеет жестко соединенные с ним втулку и фрикционный тормоз п выполнен возвратно-поступательно подвижным в осевом направлении до упоров. Втулка соединена с двуплечим рычагом, а в качестве фиксатора системы рычагов нриме)1ен храновой механизм.
Несущая магазины рама спабжена щ,упом, взаимодействующим с системой датчиков для онределения требуемого положения магазинов. Привод собачки хранового механизма выполнен электромагнитным.
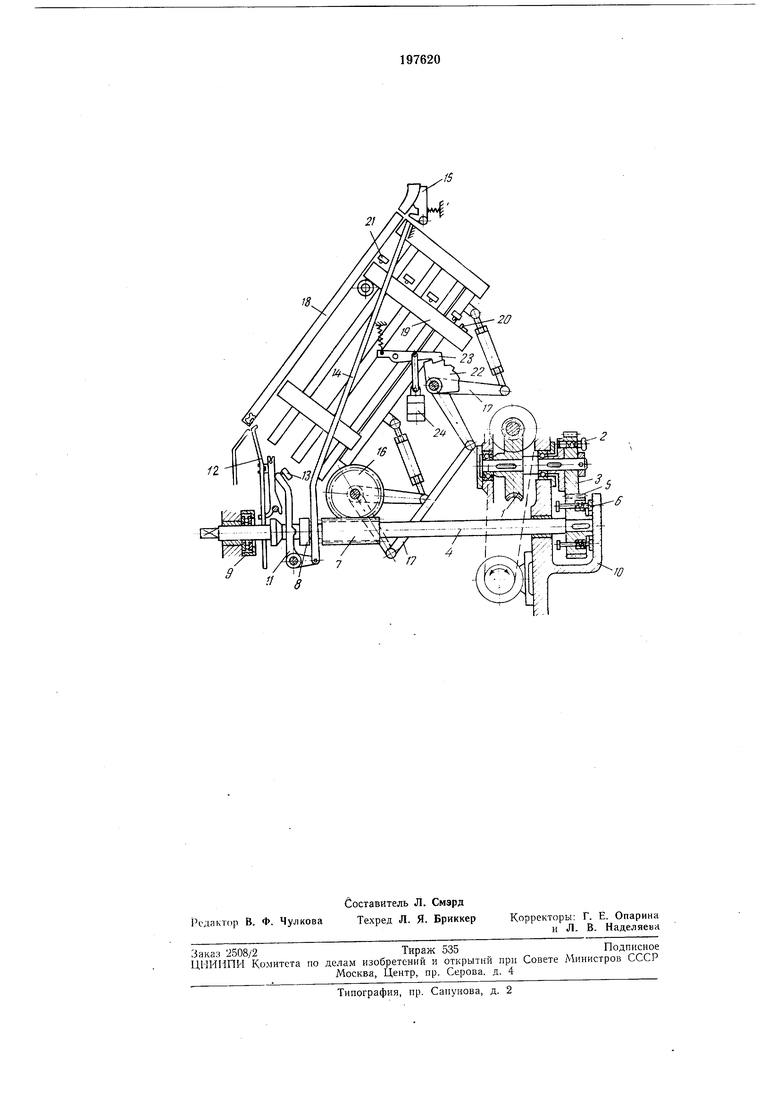
На чертеже изображено предлагаемое устройство.
Оно содержит привод 1, имеющую подпружиненный налец 2 щестерню 3, жестко посаженную на вал 4, и щестерню 5 с фрикциониым тормозом 6. Червяк 7 и втулка 5 также жестко посажены на вал 4, который выполнен возвратно-поступательно подвижным до упоров 9 и 10. Втулка 8 соединена с подпружипенным двуплечим рычагом 11, одно нле40 которого взаимодействует с рамой 12 матрицевыпускающих щтанг и конечным выключателем 13, а второе с иомощью тяги 14 с нриемником 15. Червяк 7 взаимодействует
с зубчатым колесом 16, соединенным посредСТВОД1 систе.мы рычагов 17 с несущей магазины 18 рамой 19. Последняя имеет щуп 20, взаимодействующий е системой датчиков 21. Система рычагов 17 оснащена храповым мехаиизмо-м 22, собачка 23 которого приводится в действие электромагиитом 24.
Любой магазин переводится в рабочее положение, вверх, следующим образом.
При подаче соответствующего импульса датчиком импульсов для перевода магазинов, расположенным, например, на клавиатуре наборной строкоотливной мащпны, включаются соответствующий датчик системы датчиков
мощью шестерен 3 и 5 вращение валу 4, червяк 7 которого взаимодействует с колесом 16 как винт н перемещает этот вал и втулку 8 влево до упора 9. При этом втулка 8 ириводит в действие двуплечий рычаг //, который отводит от магазина раму 12 матрицевыпускающих штанг и приемник /5. После достижения упора 9 червяк 7 приводит во вращение колесо 16, которое иосредством жестко соединенной с ним системы рычагов поднимает раму 19 с магазинами/5 до полол еиия, когда требуемый магазин будет расположен несколько выше рабочего положения. Тогда щуп 20, взаимодействуя с соответствующим датчиком системы датчиков 21, переключает привод / на обратный ход. При оиускании рамы 19 храповой механизм 22 точно устаиав- . ливает требуемый магазин в рабочее положение. После фиксации и остановки рамы 19 червяк 7 иачииает вывинчиваться нз зубчатого венца колеса 16, перемещая втулку 8 и вал 4 вправо до упора 10. Рычаг // при этом возвращает раму 12 матрнцевыиускающих штанг II приемник /.5 в рабочее положеиие, после достижения которого плечо рычага //, взаимодействуя с конечным выключателем 13, выключает иривод и систему датчиков. По инерции привод перемещает вал до упора 10, взаимодействуя с которым фрикционный тормоз 6 останавливает его и компенсирует инерцию.
Последовательность перевода магазина из верхнего положения в нижнее следующая. При подаче соответствующего импульса датчиком имиульсов д,1я нерегюда магазииов включаются соответствующий датчик системы датчиков и иривод на иодъем. После подъема рамы 19 несколько выше первоначального положения щуп 20 включает электромагнит 24, который отводит собачку 23 от храпового механизма и переключает привод на онускание рамы. Когда требуемый магазин несколько не дойдет до рабочего положения, щуп 20, взаимодействуя с соответствующим датчиком системы датчиков 21, отключает электромагнит 24, и собачка 23 фиксирует раму в требуемом ноложении. При этом отвод и подвод рамы 12 матрицевыиускающих штанг .и приемника 15 производится как и при переводе магазинов вверх.
Если необходим перевод магазинов вручную цодпружинеиный палец 2 разъединяет вал 4 с приводом /.
Предмет изобретения
1. Устройство для неревода матричных магазинов наборной строкоотливной машины, имеющей несущую магазнны раму, раму матрицевыиускаюшнх штанг и нрнемник матриц,
5 содержащее соединенное с несущей магазины рамой иосредством системы рычагов зубчатое колесо, которое взаимодействует с червяком, посаженным на валу и соединенным с нриводом, управляемым датчиком импульсов д.ля неревода магазинов, отличающееся тем, что, с це,чью ноБ1з1шения надежностн де11ст1И1Я. устройства, оно снабжено определяющей требуемое положение магазинов системой датчиков и двунлечнм рычагом, одно нлечо которого соединено с рамой матрицевынускающнх штанг, а второе -- с нриемннком матриц, а червяк жестко иосажен на валу, которьп имеет жестко соединенные с ннм втулку н фрикционный тормоз н выполнен возвратио0 поступательно подвижным в осевом иаправлеини до упоров, при этом втулка соединена с двунлечнм рычагом, а в качестве фиксатора системы рычагов применен храиовой механизм.
5 2. Устройство но н. 1, отличающееся тем, что несущая магазнны рама снабжена щуном, взаимодействующим с системой датчиков для онределення требуемого ноложения магазинов.
0 3. Устройство но н. 1, отличающееся тем, что прпвод собачкн храпового механпзма электромагннтньп.
4. Устройство но ИИ. 1, 2 и 3, отличающееся тем, что электромагиитпый привод выполнен
5 унравляемым датчиком импульсов для иеревода магазинов и системой датчиков.
/.
/2
11
| название | год | авторы | номер документа |
|---|---|---|---|
| УЬХНПЧЕСКЛЯ БИБ-'ИОТГиА | 1965 |
|
SU167891A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНЫ | 1971 |
|
SU424742A1 |
| СТРОКООТЛИВНАЯ НАБОРНАЯ МАШИНА | 1964 |
|
SU164303A1 |
| Механизм для смены шпуль к пестроткацкому станку | 1959 |
|
SU123887A1 |
| Устройство для аварийного торможения каретки подъемника | 1983 |
|
SU1123978A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ МАГАЗИНОВ СТРОКООТЛИВНОЙ НАБОРНОЙ М.^\ШИНЫ | 1964 |
|
SU164304A1 |
| МАТРИЦЕВЫПУСКАЮЩИЙ МЕХАНИЗМ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНЫ | 1969 |
|
SU255946A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ЦЕНТРАЛИЗОВАННОЙ УСТАНОВКИ ФОРМАТА В СТРОКООТЛИВНОЙ НАБОРНОЙМАШИНЕ | 1970 |
|
SU283935A1 |
| Устройство для смены уточных шпуль на автоматическом ткацком станке | 1971 |
|
SU479834A1 |
| Устройство кривовязюка для загрузки листового материала на каретку | 1980 |
|
SU912351A1 |