Известные системы кругового сканирования горизонта не обеспечивают высокой точности определения положения стабилизируемых платформ и сложны по конструкции.
В предлагаемом индикаторе горизонта используется одна оптическая следящая головка, состоящая из двух пар головных призм цилиндрического обтюратора, зеркальпо-линзового объектива и общего для всех головных призм фотоприемнкка с входной щелевой диафрагмой.
Для скоростного определения углов наклона стабилизируемой платформы относительно видимого горизонта путем автоматической регистрации, обработки и передачи результатов измерений в соответствии с сигналами, вырабатываемыми комапдпым устройством, отсчетпая система выполнена в виде оптической схели пз пепрозрачпой масщтабной линейки с нрозрачными щтриха.ми, оптического клинового компенсатора и объектива, а командное устройство состоит из блока фотодиодов, коллимированного источника света и кодовых дорожек на новерхности цилиндрического обтюратора. Кроме того, для повыщепия точности определения положения стабилизируемой платформы относительно визируемого горизонта путем исключения ощибок кинематических связей прибор снабжеп оптическим клиновым компенсатором.
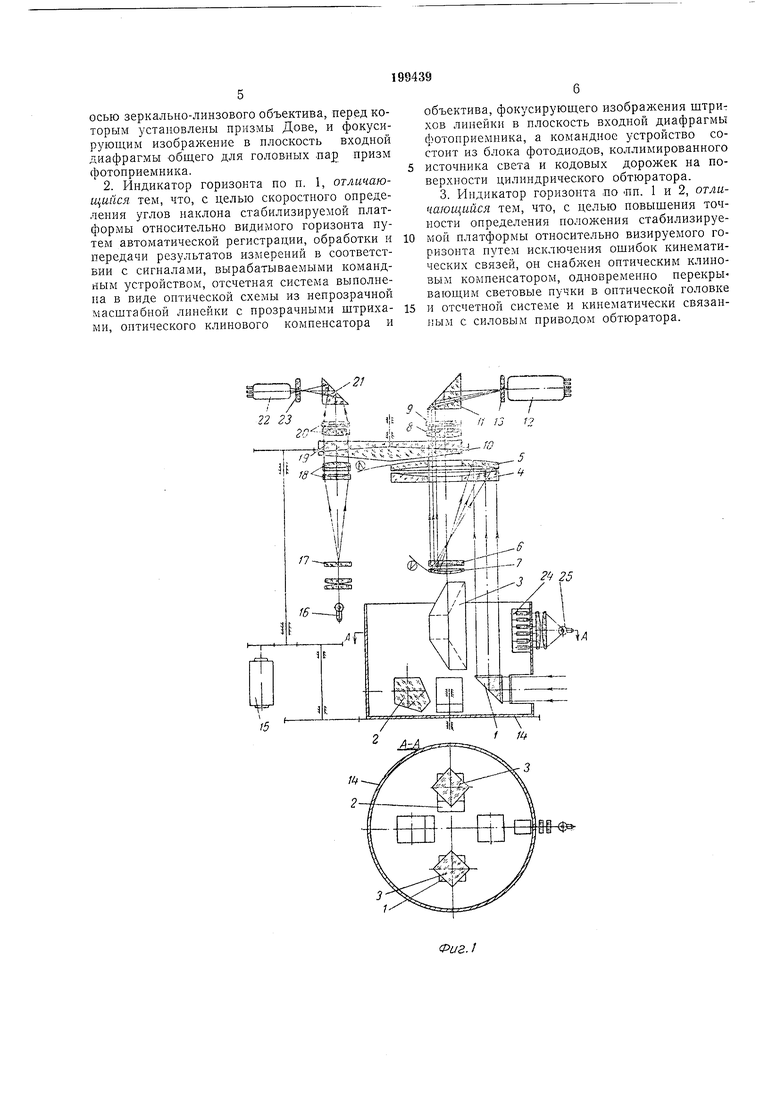
На фиг. 1 дана принципиальная схема описываемого индикатора; на фиг. 2 показаны углы наклона стабилизируемой платформы отпосительпо истинной и видимой линии горизонта; на фиг. 3-5 - эпюры вырабатываемых еигналов.
Индикатор содержит оптическую головку для индикации линии горизонта и отсчетную систему.
Оптическая следящая головка состоит из двух нар головных призм 1, 2, составленных из прямоугольной призмы и пентапризмы и установленных в одной нлоскости во взаимно пернендикуляриых направлениях, обеспечивающих визирование горизонта в четырех нанравлениях; двух призм 3 Дове, устраняющих наклон нроецируемого изображения, зеркально-линзового объектива, составленного из линз 4, 5, 6, 7, 8, 9, оптического клинового комненсатора 10, прямоугольпой призмы И, фотоприемни.ка 12 с входной щелевой диафрагмой 13 и цилиндрического обтюратора 14, кинематически связанного с двигателем 15. Каждая нара линз 4-5 и 6-7 объектива несмотря на сферические поверхности эквивалентна по де11ствию параболическому зеркалу.
ческого компенсатора 19, объектива 20, прямоугольной призмы 21 и фотоприемпика 22 с входной щелевой диафрагмой 23. Оптические клиновые компенсаторы в отсчетной системе и визирном канале выполнены в виде единого блока, кинематически связанного с двигателем 15.
С визирным каналом оптической головки непосредственно связана командная система, состоящая из блока фотодиодов 24, коллимированного источника света 25 и кодовых дорожек на цилиндрическом обтюраторе 14, выполненных в виде прорезей определенной угловой величины, зависящей от длительности подаваемых в электроппую схему команд. При вращении обтюратора последовательно открываются головные пары призм 1 к 2, визирующие четыре стороны горизонта. Изображение линии горизонта с помощью призмы Дове и зеркально-линзового объектива проецируется в плоскость входной щели фотоприемника 12. При этом вращающийся клиповой компенсатор 10 перемещает изображение линии горизонта поперек щели /5 и с фотоприемника снимается сигнал, пропорциональный величине светового потока, поступающего в щель.
Одновременно с перемещением линии горизонта относительно щели 13 перемещается изображение штрихов масштабной линейки 17 поперек входной диафрагмы 23 .фотоприемника 22, вырабатывающего сигнал в виде последовательности импульсов, образуемых изображением штрихов масштабной линейки, цена деления которых соответствующим образом рассчитана.
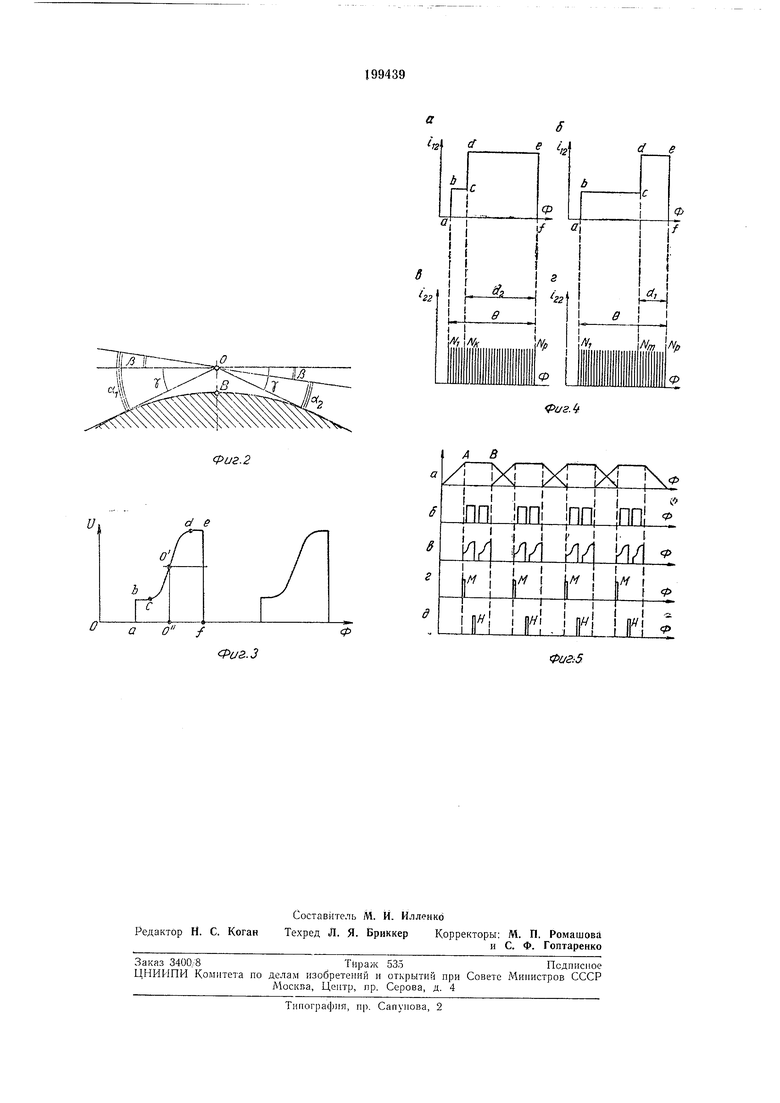
В основу работы прибора положена формула: р - (oiX - йо), где ai - сумма двух
2t
углов: угла понижения видимого горизонта относительно истинного у и угла наклона платформы относительно истинного горизонта; аа - разность этих углов.
Прибор определяет углы tx,i и а и автоматически вырабатывает угол наклона (3.
При сканировании границы раздела, например, море - небо фотоприемпое устройство выдает сигнал, форма которого представлена на фиг. 3.
Здесь ав - момент, соответствующнй появлению в щели 13 изображения моря; ее - участок, соответствующий нрохождению по щели изображения участка моря (полное открытие обтюратором объективной призмы); cd - участок, соответствующий прохождению изображения области границы раздела (линии горизонта) но щели 13;
de - участок, соответствующий прохождению по щели 13 изображения неба;
при прохождении различных участков сканирования в зависимости от угла поворота оптического компенсатора 10 или 19.
За нульпункт принимается конечный импульс от последнего изображения штриха масштабной линейки 17, и в одном случае электронная схема отсчетной системы считает и запоминает число импульсов N - /V, соответствующее углу а-2, а в другом (.когда в систему индикации поступает изображение от диаметрально нротивоположной стороны горизонта)- число ИМНуЛЬСОВ (Л ) СООТветствующее углу а,. Оптико-механическая схема индикатора построена так, что за период открытия обтюратором каждой из гоjfOBHbix призм горизонт дважды сканируется по щели фотоприемника 12 (это достигается определенным подбором скоростей вращения обтюратора и компенсатора) и, следовательно, за время полного открытия обтюратором одной из головных призм врибора фотоприемник вырабатывает два носледовательных импульса (фиг. 5). Электронные схемы обработки сигналов построены так, что выделяются участки сигнала, соответствующие уровню освещенности моря и неба. Амплитуды выделенных сигналов суммируются, а амплитуда суммарного сигнала делится Пополам, что будет формально соответствовать сигналу от линии горизонта (граница раздела двух сред). Так как фотоприемник 12 вырабатывает в момент полного открытия головной призмы два нмпульса, то полученные амплитуды сигналов сравниваются и в случае совпадения вырабатывается команда, открывающая счет импульсов в отсчетной системе. Эти импульсы поступают каждый раз на один из четырех сумматоров, на выходе которых после опроса по всем четырем сторонам горизонта получаются искомые значения углов |3 по двум взаимно перпендикулярным направлениям визирования, выраженные в двоичном коде. Электрические команды, открываюндие счет имнульсов, и другие, управляюп ие работой прибора, вырабатываются с помощью фотодиодов 24. Последовательность и длительность этих команд определяется расположением прорезей кодовых дорол ек на обтюраторе.
Предмет изобретения
1. Фотоэлектрический индикатор горизонта, содержащий следящую онтическую головку кругового сканирования и отсчетную систему
с фотоэлектрическими преобразователями, связанными через электронную схему обработки сигналов с командным устройством, отличающийся тем, что, с целью упрощения конструкции прибора в целом, оптическая головка выполнена в виде составленных из прямоугольной :призмы и пенталризмы двух головных пар призм, установленных в одной плоскости во взаимно перпендикулярных направлениях, и цилиндрического обтюратора, ось
осью зеркально-линзового объектива, перед которым установлены нризмы Дове, и фокусирующим изображение в плоскость входной диафрагмы общего для головных naj призм фотоприемника.
2. Индикатор горизонта по п. 1, отличающийся тем, что, с целью скоростного определения углов наклона стабилизируемой платформы относительно видимого горизонта путем автоматической регистрации, обработки и передачи результатов измерений в соответствии с сигналами, вырабатываемыми командным устройством, отсчетная система выполнена в виде оптической схемы из непрозрачной масщтабной линейки с прозрачными штрихами, оптического клинового компенсатора и
объектива, фокусирующего изображения щтрихов линейки в плоскость входной диафрагмы фотоприемника, а командное устройство состоит из блока фотодиодов, коллимированного источника света и кодовых дорожек на поверхности цилиндрического обтюратора.
3. Индикатор горизонта по Пп. 1 и 2, отличающийся тем, что, с целью повыщения точности определения положения стабилизируемой платформы относительно визируемого горизонта путем исключения ошибок кинематических связей, он снабжен оптическим клиновым компенсатором, одновременно перекрывающим световые пучки в оптической головке и отсчетпой системе и кинематически связанным с силовым приводом обтюратора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Оптическое фотоэлектрическое устройство | 1990 |
|
SU1753444A1 |
| ВИЗИРНОЕ ФОТОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО | 1972 |
|
SU349963A1 |
| Устройство для измерения линейныхРАзМЕРОВ (ЕгО ВАРиАНТы) | 1979 |
|
SU827972A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ШИРОКОДИАПАЗОННЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ СМЕЩЕНИЙ | 1993 |
|
RU2069309C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОТСЧЕТНОГО КРУГА УГЛОМЕРНОГО ИНСТРУМЕНТА | 1992 |
|
RU2082087C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛАЗЕРНОГО ДАЛЬНОМЕРА | 2003 |
|
RU2246710C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| Двухкоординатный фотоэлектрический микроскоп | 1980 |
|
SU894353A1 |
| Измеритель степени видимости | 1988 |
|
SU1578552A1 |
,J f/ 13 Г2
d е
0
а о f
Фиг..З
