Известны суммирующие механизмы для систем с программным управлением, содержащие вращающиеся диски, соединенные между собой последовательно или параллельно гибкой связью. Привод дисков молсет быть электрическим. Наличие гибкой связи снижает точность и надежность суммирующего механизма.
Предложенный суммирующий механизм отличается тем, что он выполнен в виде набора одинаковых храповых механизмов, из которых закреплен на диске, установленном на общем валу с немощью подшипников, кроме последнего диска, который жестко связан с этим валом. Вал соединен с рабочим механизмом системы, а привод каладого храпового колеса выполнен в виде двух электромагнитов, укрепленных на диске предыдущего храпового механизма, кроме первой пары электромагнитов, которые установлены на станине. Благодаря этому увеличивается число входов механизма от программирующей системы и повыщается надежность ее работы.
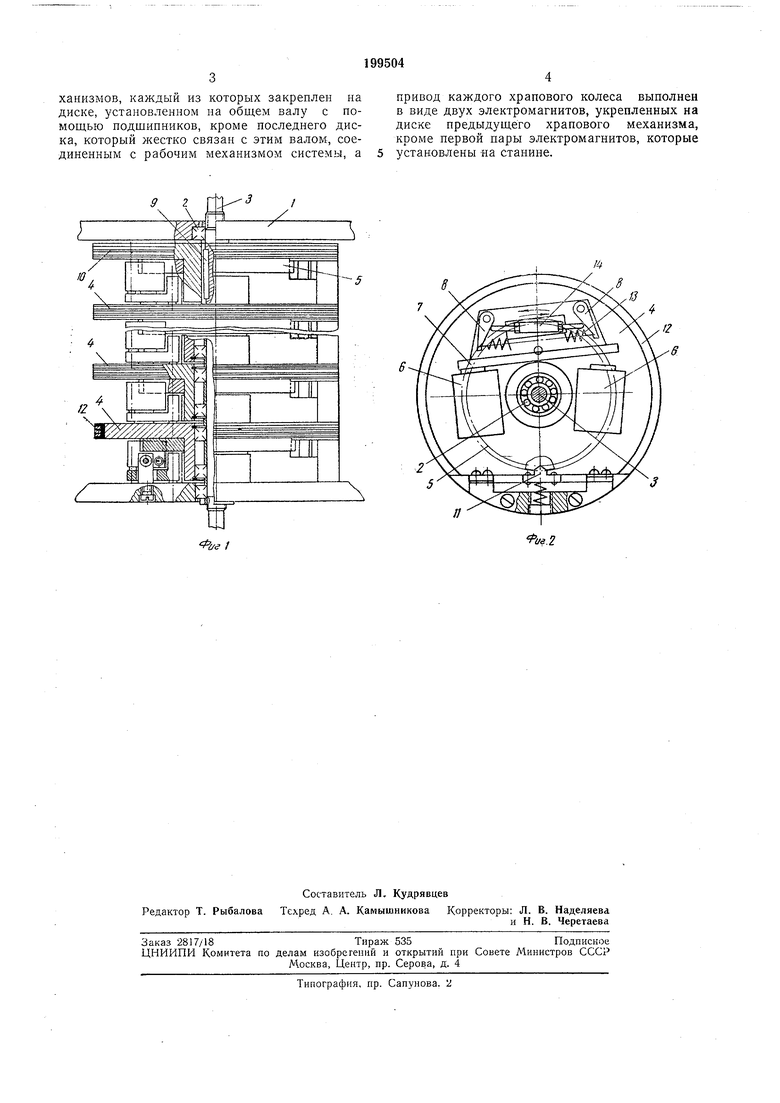
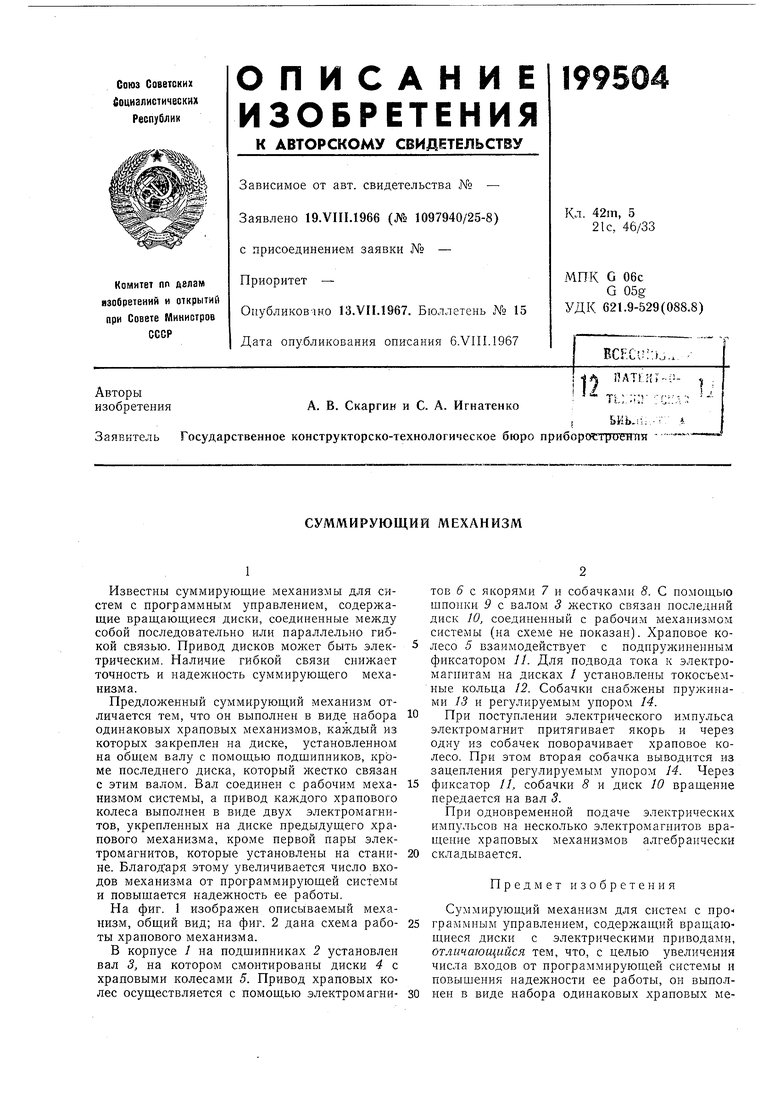
Па фиг. 1 изображен описываемый механизм, общий вид; на фиг. 2 дана схема работы храпового механизма.
тов 6 с якорями 7 и собачками 8. С помощью шпонки 9 с валом 3 жестко связан последний диск 10, соединенный с рабочим механизмом системы (на схеме не показан). Храповое колесо 5 взаимодействует с подпрул иненным фиксатором 11. Для подвода тока к электромагнитам на дисках / установлены токосъемные кольца 12. Собачки снабжены пружинами 13 и регулируемым запором 14.
При поступлении электрического импульса электромагнит притягивает якорь и через одну из собачек поворачивает храповое колесо. При этом вторая собачка выводится из зацепления регулируемым упором 14. Через фиксатор //, собачки 8 и диск 10 вращение передается па вал 3.
При одновременной подаче электрических импульсов на несколько электромагнитов вращение храповых механизмов алгебраически складывается.
Предмет изобретения
Суммирующий механизм для систем с npo-i граммным управлением, содержащий вращающиеся диски с электрическими приводами, отличающийся тем, что, с целью увеличения числа входов от программирующей системы и повышения надежности ее работы, ои выполнеп в виде набора одинаковых храповых механизмов, каждый из которых закреплен на диске, установленном на общем валу с помощью подшипников, кроме последнего диска, который жестко связан с этим валом, соединенным с рабочим механизмом системы, а
привод каждого храпового колеса выполнен в виде двух электромагнитов, укрепленных на диске предыдущего храпового механизма, кроме первой пары электромагнитов, которые установлены на станине.
//
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММНОЕ УСТРОЙСТВО | 1970 |
|
SU258423A1 |
| Счетная машина | 1934 |
|
SU49498A1 |
| ТЕРМОГЕНЕРАТОР | 2007 |
|
RU2355911C2 |
| Станок для шаговой подачи листовой резины на обработку | 1972 |
|
SU438547A1 |
| ЭЛЕКТРИЧЕСКАЯ ПИШУЩАЯ МАШИНА | 1924 |
|
SU1875A1 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ | 1921 |
|
SU7177A1 |
| Шаговый искатель | 1980 |
|
SU892515A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2077108C1 |
| УСТРОЙСТВО ЗВУКОВОЙ ИНФОРМАЦИИ | 1971 |
|
SU305506A1 |
| РОТОРНЫЙ МНОГОПОЗИЦИОННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1965 |
|
SU174683A1 |