54) ШАГОВЫЙ ИСКАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый искатель | 1977 |
|
SU686098A1 |
| Шаговый конвейер | 1990 |
|
SU1720955A1 |
| Шаговый конвейер-накопитель | 1985 |
|
SU1313774A1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2421842C1 |
| ВЕЛОСИПЕД И РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ | 1999 |
|
RU2155141C1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| ПЕЧАТНО-ОТМЕТОЧНАЯ МАШИНА | 1968 |
|
SU210186A1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2367050C1 |
| Устройство управления плоскофанговой машиной | 1959 |
|
SU128966A1 |
| Роторно-конвейерная линия | 1983 |
|
SU1135608A1 |
1
Изобретение относится к автоматике, в частности к переключателям с электромагнитным приводом типа шаговых искателей, и может быть использовано в электрических схемах автоматизации технологических производственных процессов.
Известен шаговый искатель, содержащий установленные на плате храповое колесо, с электромагнитным приводом, связанные между собой установленной на якоре электромагнита собачкой, тормоз и упор для предотврашения проворачивания храпового колеса, подвижный и неподвижный контакты.
Неподвижные контакты распбложены пр окружности на плате вокруг храпдвого колеса. Подвижньш конхакт установлен иа конце консольной пластины, второй конец которой прикреплен к храповому колесу. Тормоз выполнен в виде пластины, прижимающейся к зубу храпового колеса 1.
Однако эта конструкция рассчитана на слабые токи. Усилить контакты невозможно вследствие консольного крепления подвижного контакта. Конструкцию невозможно также применять без дополнительной аппаратуры в силовых цепях. Кроме того, устройство имеет опожную схему управления из-за необходимости применения отдельно командоаппаратов для цепей управления и силовых цепей и малый срок служг бы.
Известен также шаговый искатель, содержаший Храповое колесо, установленное на валу, жестко закрепленного на плате, и связанное через собачку с электромагнитным приводом,
to тормоз, упор, установленный на плате, подвижные и неподвижные контакты, фиксирующее колесо со сферическими впадинами на его наружной поверхности, соосно установленное на храповом колесе, причем тормоз выполнен в
IS виде пальца со сферической рабочей поверхностью и подвижные контакты установлены на ребрах храпового колеса, а неподвижные контакты расположены на .плате по окружности соосно храповому колесу 2.
20
Основным недостатком шагового искателя является наличие На каждой рабочей позиции только бдного силового контакта, атЗ не позволяет непосредственно от искателя BKnto4aTb
в работу двух- и трехфазные электродвигатели. Кроме того, в промежуточном положении в момент переключения подвижный контакт, перемещаясь с одной позиции на другую, замьпсает между собой оба соседних неподвижных контакта, что ограничивает область применения указанного искателя.
Цель изобретения - рассшрение области применения и повышение надежност ;.
Для достижения этой дели шаговый искатель снабжен другим храповым колесом с обратным направлением зубьев с индивидуальным электромагнитным приводом, закрепленным на плате концентрично валу корпусом, по образующей которого смонтированы механизмы силовых трехфазных контактов, кажды из которых имеет рычажную приводную систему, и кулачки, причем вал также связан с другим храповым колесом и на нем установлена, по крайней мере, одна втулка с двумя боковыми дисками, между которыми закреплен взаимодействующий с рычажной приводной системой механизма силовых контактов один из упомянутых кулачков, а по образующей каждого диска под заданным углом относительно упомянутого кулачка вьшолнена выемка.
При этом механизм трюхфазных силовых контактов состоит из трехфазного контактора, а его рычажная приводная система включает коромысло с роликом, ось и две тяги, концы которых имеют резьбу, отличающуюся величиной шага, при этом тяги установлены соосно и-соединены интегральной муфтой, ролик коромысла установлен с возможностью взаимодействия с кулачком, а ось соединяет коромыло с одной из тяг.
Кроме того, с целью исключения возможности случайного замыкания силовых контактов на позициях, не соответствующих рабочим ось соединяющая коромысло с одной из тяг, удлинена до величины, равной или большей ишрины втулки с дисками.
Причем , с целью исключения возможности проскока собачки относительно храпового колеса, искатель снабжен пружиной, соединенной одним концом с собачкой, а другим - с якорем электромагнитного привода.
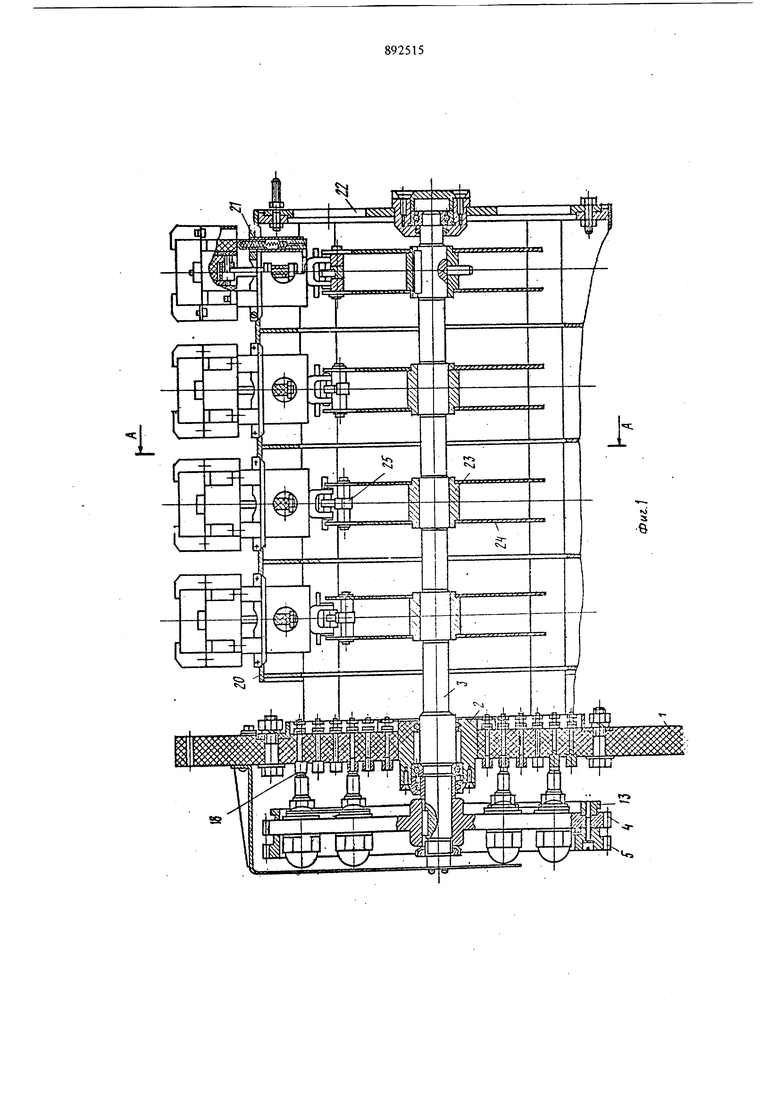
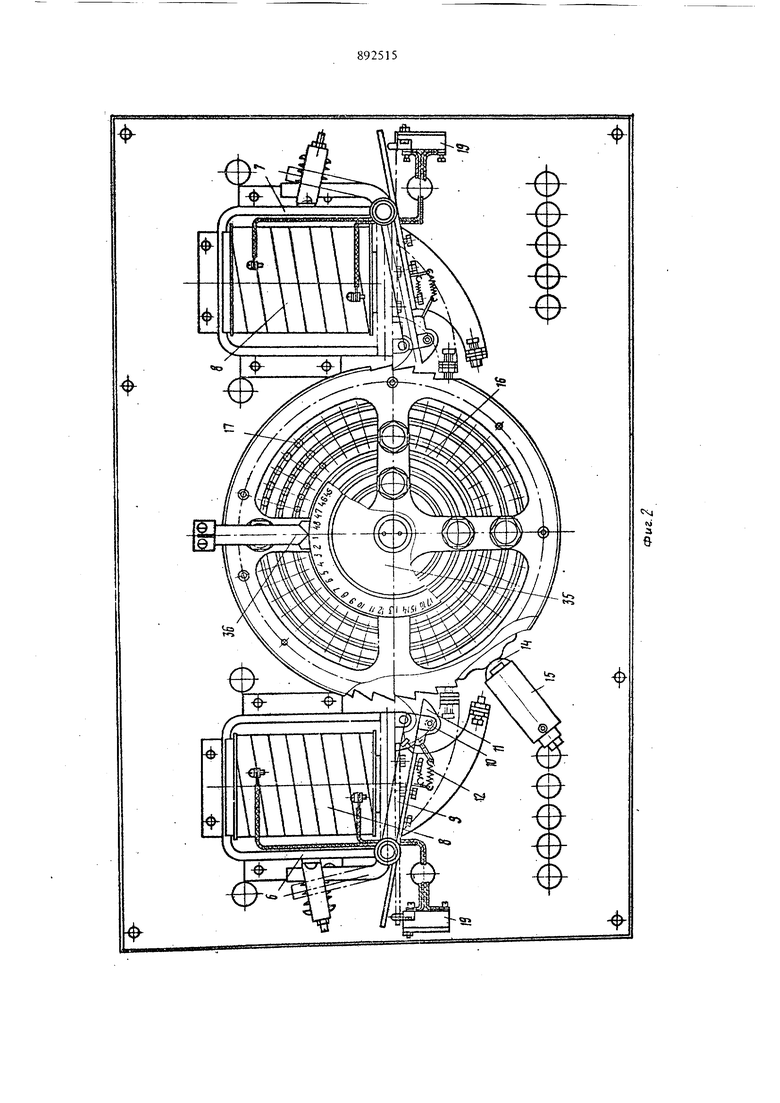
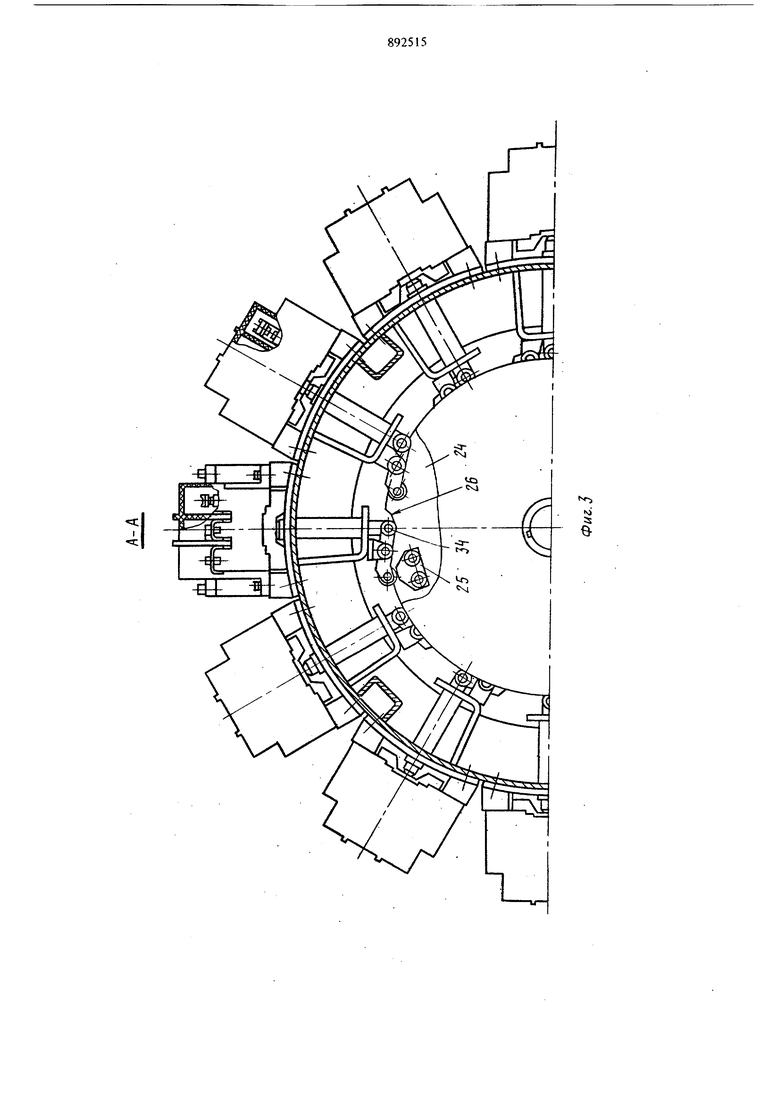
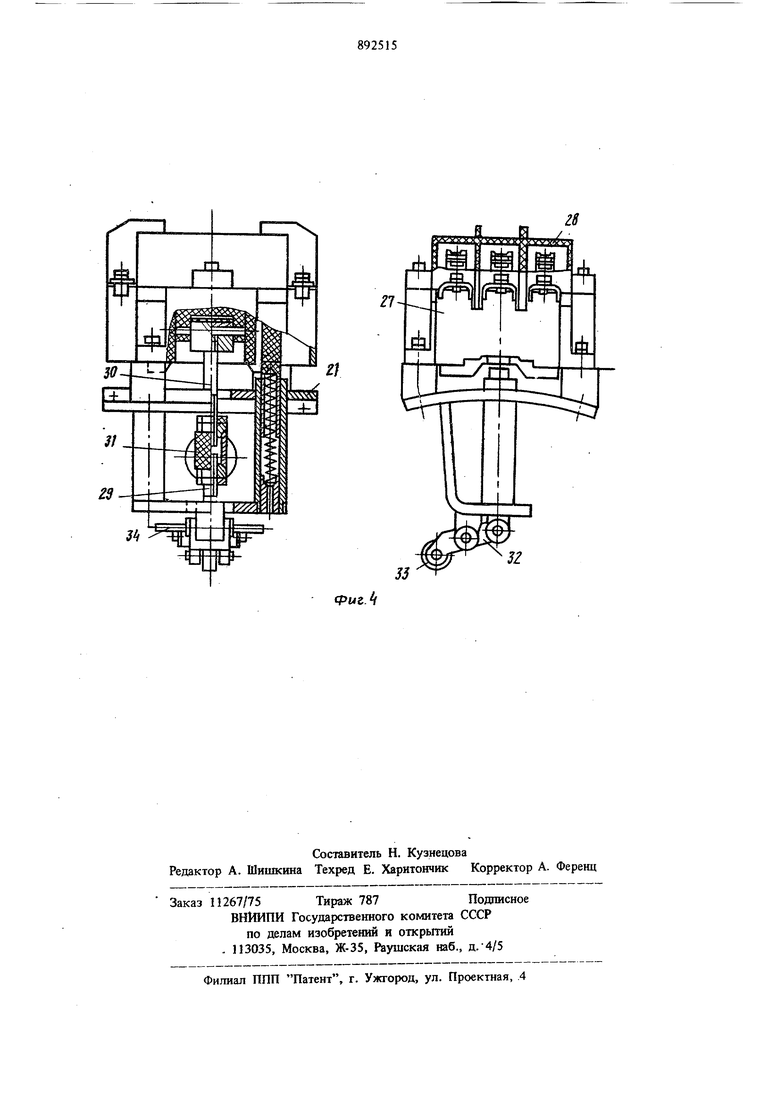
На фиг. 1 изображен предлагаемый искатель, продольный разрез;, на фиг. 2 - то же, вид спереди ,на фиг.З - разрез А-А на фиг. 1; на фиг. 4 - механизм контактов в двух проекциях.
На плате 1 установлена передняя шарикоподшипниковая опора 2 вала 3, на котором жестко закреплены храповые колеса 4 и 5, имеющие разнонаправленные зубцы и два электромагнитных привода 6 и 7. Электромагвдтный: привод представляет из себя электромагнит 8 постоянного тока, на якоре 9 которого на оси 10 установлена собачка 11, контактирующая с зубцами храпового колеса при включении электромагнита. Пружина 12 соединяет собачку И с якорем 9 и обеспечивает ее надежную фиксацию в исходном положении. На храповом колесе 4 закреплено фиксирующее колесо 13, на наружной поверхности которого вьшолнены сферические впадины, количество которых соответствует количеству зуб0 цов храпового колеса. В одну из указанных впадин входит подпружиненный ролик 14 механизма фиксатора 15, закрепленного на плате 1.
На плате 1 соосио храповому колесу смон5 тированы три кольцевые контактные токонесущие цшны 16 и три ряда неподвижных контактов 17.
Каждая шина электрически соединена при помощи пары подпружиненных подвижных
0 контактов 18, смонтированных на ребрах храпового колеса 4, с одним из неподвижных контактов в соответствующем ряду.
На плате 1 также установлены два конечных выключателя 19 для периодического раз5 рыва цепей питания электромагнитов 8.
На плате 1 со стороны обратной храповым колесам 4 и 5 концентрично валу закреплен корпус 20, по образующей которого расположены механизмы 21 трехфазных силовых контактов. Крышка 22 корпуса предназначена для установки второго подшипникового узла вала 3. На валу 3 соосно с механизмами 21 силовых контактов установлены втулки 23 с двумя боковыми дисками 24, между которыми закреплены кулачки 25, взаимодействующие с приводной системой механизма 21 силовых контактов. На образующих каждого диска 24 под заданным углом относительно кулачка выполнены выемки 26.
Механизм 21 силовых контактов состоит из трехфазного контактора 27 с тремя нормально открытыми контактами 28 и рычажной приводной системы, включающей две тяги 29 и 30, концы которых имеют резьбу, отличающуюся величиной шага, и соосно соединены интегральной регулирующей муфтой 31, а также коромысло 32 с роликом 33, взаимодействующим с кулачком 25, и удлиненную ось 34, соединяющую коромысло 32 с тягой 29, при этом длина оси 34 равна
0 или больше ширины втулки 23 с дисками 24.
Текущая позиция искателя определяется по шкале 35, закрепленной на валу 3, и стрелке 36, закрепле1шой на плате 1.
Шаговый искатель работает следующим
5 образом.
К трем токонесущим шинам 16 подключается питание цепей управления, а к трем рядам неподвижных контактов 17 - соответственно командные цепи, исполнительные цепи и цепи сигнализации. К контакторам 27 механизмов 21 силовых контактов подключаются силовые трехфазные цепи электродвигателей. Электромагнитные приводы 6 и 7 подключаются через нормально закрытые контакты конечных выключателей 19. При подаче управляющего импульса на электромагнитный прквод 6 якорь 9 притягивается к сердечнику электромагнита 8,. а собачка 11 якоря 9, зацепляя храповое колесо 4 с валом 3, проворачивает его на один шаг. В конце хода якоря нормально закрытый контакт конечного выключателя 19 размыкается и обесточивает катуцжу электромагнита 8, при повороте храпового колеса 4 поворачивается закрепленное на нем фиксирующее колесо 13 со сферическими впадинами. Фиксирующий подпружиненный ролик 14 вытесняется из впадины, сжимая пружину и, перекатываясь по образующей фиксирующего колеса 13, входит в следующую впадину, осуществляя четкую фиксацию положения храпового колеса 4 и вала 3 с втулками 23 в новой Позиции. При этом токонесущие ашны 16 через подвижные контакты 18 соединяются с очередными неподвижными контактами 17 ко мандных, исполнительных и сигнальных цепей, а кулачок 25 одной из втулок 23 с дисками 24 с помощью рычажной приводной системы замыкает силовые контакты очередного механизма 21, производя включение соответствующего приводного электродвигателя. В момент поворота ось 34 рычажной приводной системы механизмов 21 свободно входит своими концами в выемки 26 на дисках 24 втулки 23, не препятствуя замыканию кон тактов контактора 27. По окончании работы двигателя срабатывает конечный выключатель 19, подавая очередной управляющий импульс на электромагнитный привод щагового искателя, при этом щаговый искатель поворачивается на следующую позицию. Ранее замкнутые силовые кон такты механизма 21 размыкаются, выемки 26 дисков 24 смещаются и ось 34 рычажной приводной системы блокируется дисками 24, не допуская возможности самопроизвольного включения контактов, силовые контакты очередного механизма 21 замыкаются, производя включение следующего приводного электродвигателя. При подаче управляющего импульса на электромагнитный привод 7 происходит поворот храпового колеса с валом аналогично описанному, но только в обратном направлении. Цепи сигнализации применяются для дистанционного указания позиции щаговог искателя. Шаговый искатель может быть применен без дополнительной аппаратуры в трехфазных СИЛОВЫХ цепях для включе1шя электродвигателей мощностью до 10 кВт, наличие дополнительных неподвижных контактов позволяет расширить область применения искателя в системах автоматизации. Кроме того, искатель обеспечивает повыщение надежности в работе за счет жесткой механической блокировки трехфазных силовых контактов на нерабочих позициях, а наличие пружины, фиксирующей собачку в исходном положении, исключает возможность проскока собачки относительно храпового колеса. Формула изобретения 1. Шаговый искатель, содержащий храповое колесо, установленное на валу и связанное через собачку с электромагнитным приводом, тормоз, упор, смонтированный на плате, подвижные и неподвиж1П 1е контакты, фиксирующее колесо со сферическими впадинами на его наружной поверхности, соосно установленное на храповом колесе, при этом подвижные контакты, фиксирующее колесо со сферическими впадинами на его наружной поверхности, соосно установленное на храповом колесе, при этом подвижные контакты установлены на ребрах этого храпового колеса, а неподвижные контакты расположены на плате по окружности соосно храповому колесу, отличающийся тем, что, с целью расшире1шя области применения и повыщения надежности, он снабжен другим храповым колесом с обратным направлением зубьев с индивидуальным электромагнитным приводом, закреплет1ым на плате концентрично валу корпусом, по образующей которого расположены механизмы силовых трехфазных контактов, каждый из которых имеет рычажную приводную систему, и кулачки, при этом вал также связан с другим храповым колесом и на нем смонтирована, по крайней мере, одна втулка с двумя боковыми дисками, между которыми закреплен взаимодействующий с рычажной приводной системой механизма силовых контактов, по крайней мере, один из упомянутых кулачков, а по образующей каждого диска под заданньш углом относительно упомянутого кулачка выполнена выемка. 2. Искатель по п. 1, о т л и ч а ю щ и йс я тем, что механизм трехфазных силовых контактов состоит из трехфазного контактора, а его рычажная приводная система включает коромысло с роликом, ось и две тяги, концы которых имеют резьбу, отличающуюся величиной щага, при этом тяги установлены соосно и соединены интегральной муфтой, ролик коромысла установлен с возмож юстью взаимо7действия с кулачком, а ось соединяет коромысло с одной из тяг. 3.Искатель по пп. 1и 2, отличают и и с я тем, что, с целью исключения возможности случайного замыкания силовых трехфазных контактов на позициях, не соответствующих рабочим, ось, соединяющая коромысло с одной из тяг, удлинена до величины, равной или большей ширины итулки с дисками. 4.Искатель по пп. 1-3, отличающийся тем, что, с целью исключени возможности проскока собачки относительно храпового колеса, он снабжен пружиной, один конец которой соединен с собачкой, а другой с якорем электромагнитного привода. Источники информ ации, принятые во внимание при экспертизе 1.Руководящие материалы по электрофикации металлорежущих станков. ЭНИИМС, 1963, с. 5, 25. 2.Авторское свидетельство СССР N 686098, кл. Н 01 Н 63/00, 09.06.77 (прототип).
«Ч| ev)
: &
I
Ni 5
&
274
32
