Известные схемы сильпо- и слаботочной релейной и бесконтактной аппаратуры, применяемые для автоматизации работы поточнотраспортных систем, являются индивидуальными устройствами, используемыми в конкретной системе. Они содержат диодную матрицу ,с трямыми и инверсными шинами, питаемую переменным током, с выдачей команд в зависимости от сочетания поступающих на его входы управляющих сигналов.
Предлагаемое устройство позволяет создать универсальную схему соединения элементов для применения его при автоматизации различных механизмов. Оно отличается от известных тем, что в нем между каждым из входов матрицы и источником управляющего сигпала включен трансформатор. Одна из его обмоток соединена с этим источником, вторая - со вторичной обмоткой матричпого трансформатора последовательно и встречно и подключена к шине матрицы соответствующей прямой операции, третья обмотка подключена к щине, соответствующей инверсной операции, четвертая включена в цепь обратной связи, а между каждым из выходов и исполнительным органом механизма включен усилитель с задержкой или без нее.
схема дистанционного управления автоматизированной поточно-транспортной системой.
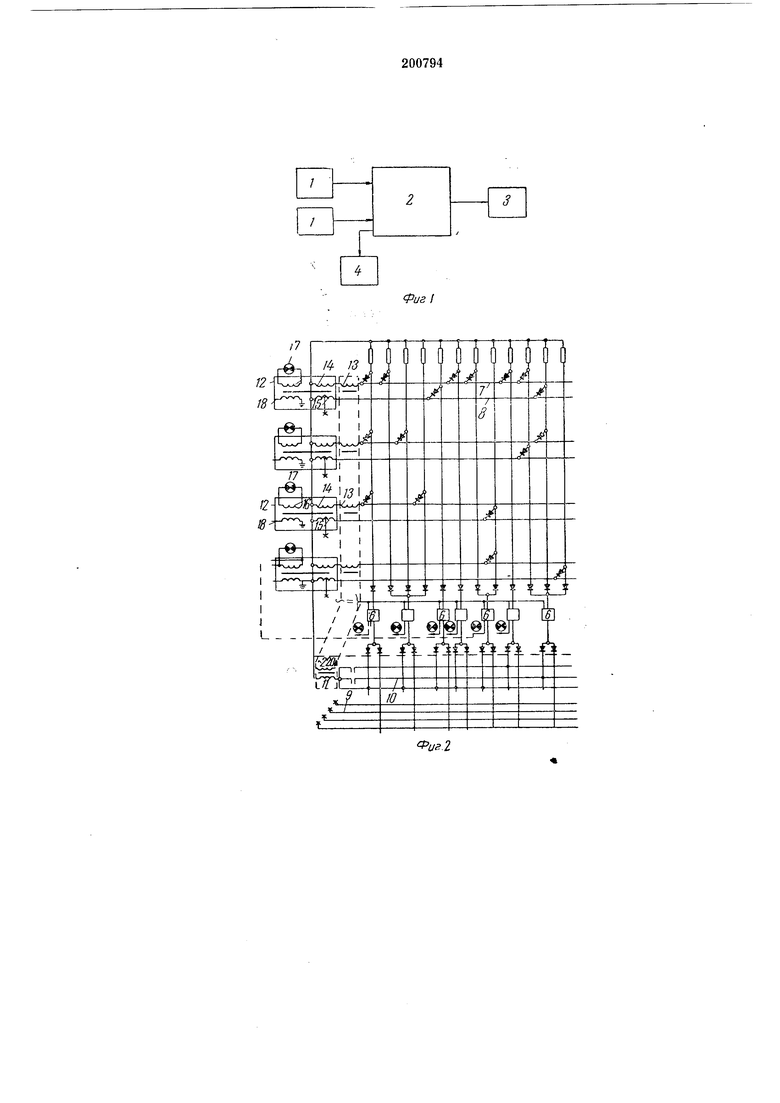
Сигналы, характеризующие положение механизмов, органов управления и ;состояние различных технологических параметров, с датчиков / (см. фиг. 1) поступают в элементарную ячейку 2. В ней рещаются все логические операции и вырабатываются управляющие команды, которые подаются на исполнительные органы 3 и блок сигнализации 4.
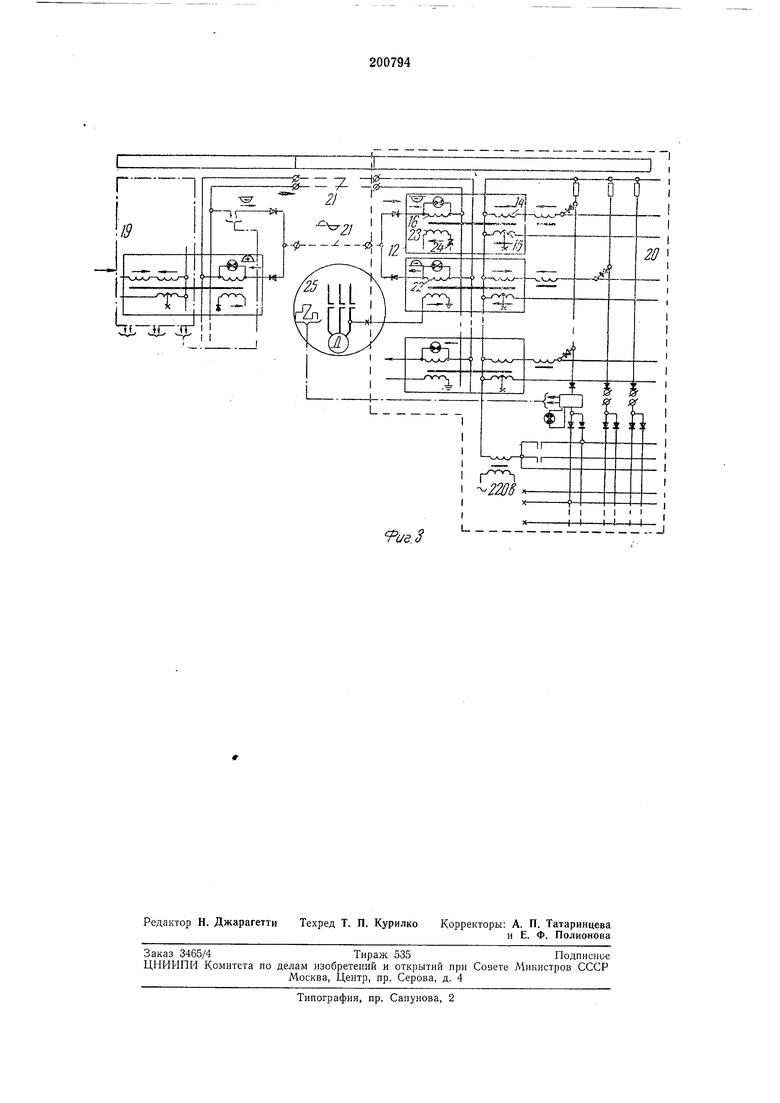
В элементарной ячейке 2 на основе матрицы 5 (см. фиг. 2) получены логические операции «И, «ИЛИ, «НЕ, а также операции «время и «память
Операция «время осуществляется оодключепием на выход матрицы усилителей 6 с выдержкой времени, операция «память - подкл очением выхода матрицы 5 к ее входу. В схеме матрицы 5 к каждому входу, кроме
пря,мой 7 и инверсной 8 горизонтальных шинок, подключена блокирующая горизонтальная шинка 9 и пусковые шинки 10, число которых соответствует числу возможных общих команд управления. Входы матрицы 5 выполиены по схеме, в которую входят общий 11 и индивидуальные 12 трансформаторы. Вторичные обмотки 13 общего трансформатора 11 включены в прямые шинки 7 входов, за исключением обмотки, иитающей пусковые шинОбмотки 14-16 входных трансформаторов 12 включены следующим образом: обмотка 14 в прямые шиики 7 встречио с обмоткой 13 общего трансформатора 11, обмотка 15 в инверсные 8 и блокирующие 9 шинки, обмотка 16 К лампе 17 сигнализации. Входной сигнал от датчиков / поступает на вход матрицы 5 в первичную обмотку 18 входного трансформатора 12.
В результате .применения такой «хемы входов матрицы обеспечивается бесконтактный ввод в устройство сигналов с одновременной их инверсией и .бесконтактная выдача сигналов состояния объектов управления.
Для дистанционного централизованного управления механизмами устройство снабжено двумя одинаковыми схемами 19 и 20 матрицы, одна из которых расположена на пункте диапетчера, другая - в цехе. При выборе диспетчером к включению какого-либо объекта с выхода матрицы 19 в виде отрицательных полуволн переменного подаются командные импульсы в обмотку 16 входного трансформатора 12 цеховой матрицы 20. В управляющих обмотках 14 и 15 «аводятся э. д. с., в результате чего на цеховой матрице 20 фиксируется избирание данного объекта управления.
Сиг-нал о включении объекта управления к диспетчеру передается по той же линии 21 в виде положительных полуволн переменного тока, наведенных в обмотке 22 цеховой матрицы.
В связи с тем, что во входные трансформаторы 12 матриц подаются полуволны только лишь одного знака, предусматривается искусственное перемагничивание трансформаторов. Для этого служат обмотки 23 с диодами 24, кроме того, обмотки 23 являются входными при приеме сигнала от датчика 25.
Система управления компануется путем еаращивания необходимого числа элементарных ячеек по горизонтали и вертикали.
Предмет изобретения
Устройство для автоматизации механизмов, содержащее диодную матрицу с прямыми и инверсными шинами, питаемую переменным током, с выдачей .команд в зависилшсти от сочетания постунающих на его входы управляющих сигналов, отличающееся тем, что, с целью унификации - применения устройства с одной и той же внутренней схемой для автоматизации различных механизмов, в нем между каждым из входов матрицы и источником управляющего сигнала включен трансформатор, одна из обмоток которого соединена с этим источником, вторая - со .вторичной обмоткой матричного трансформатора последовательно и встречно и подключена к шине матрицы, соответствующей прямой операции, третья обмотка подключена к щине, соответствующей инверсной операции, четвертая включена в цепь обратной связи, а между каждым из входов и исполнительным органом механизма включен усилитель с задержкой или без нее.
i7
Г .УЛ
II II
rj
L.
ие.З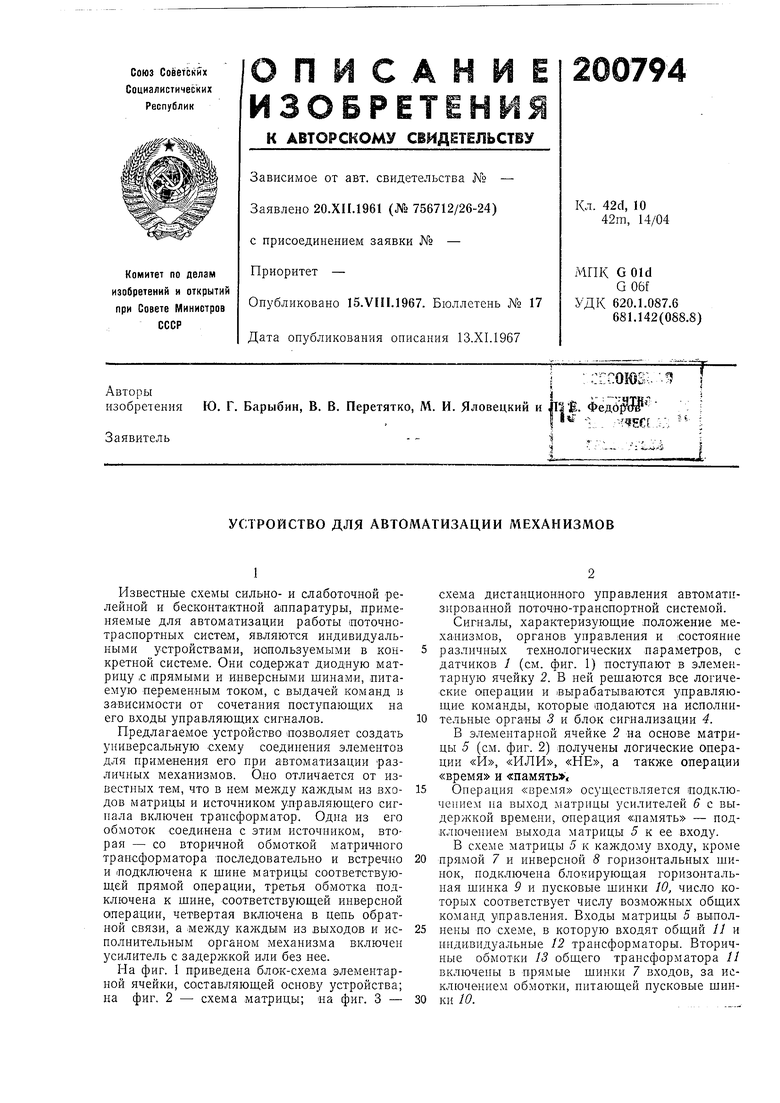
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДНЫМИ МЕХАНИЗМАМИ'П1 •: •if4 ^• | 1973 |
|
SU395886A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ УПРАВЛЯЮЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕМПЕРАТУРНЫМИ ПАРАМЕТРАМИ ОБЪЕКТОВ ГАЗОВОГО ПРОМЫСЛА | 2022 |
|
RU2801843C1 |
| Устройство для поверки электрических секундомеров | 1986 |
|
SU1392543A1 |
| Устройство для определения электромагнитных постоянных времени обмоток синхронной электрической машины | 1983 |
|
SU1144061A1 |
| Ассоциативный параллельный процессор | 1981 |
|
SU1166128A1 |
| БЕСКОНТАКТНОЕ ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИЗМЕРЕНИЙ | 1967 |
|
SU191844A1 |
| ЭЛЕКТРОННАЯ КЛАВИАТУРА | 1971 |
|
SU428553A1 |
| Устройство для проверки максимальной токовой защиты в отключенном состоянии | 1974 |
|
SU792404A1 |