Известны феррозондовые следящие системы, в которые введен элемент коррекции. Однако такие системы недостаточно точны и требуют периодической подстройки и подгонки элементов.
Предложенная система отличается от известных тем, что сигнал коррекции (первую производную от возмущения по времени) формируют путем выделения квадратурной составляющей э.д.с. феррозонда и перемножения ее с синфазной составляющей, пропорциональной сигналу обратной связи по действующей на феррозонд напряженности магнитного поля.
Это повышает точность регулирования.
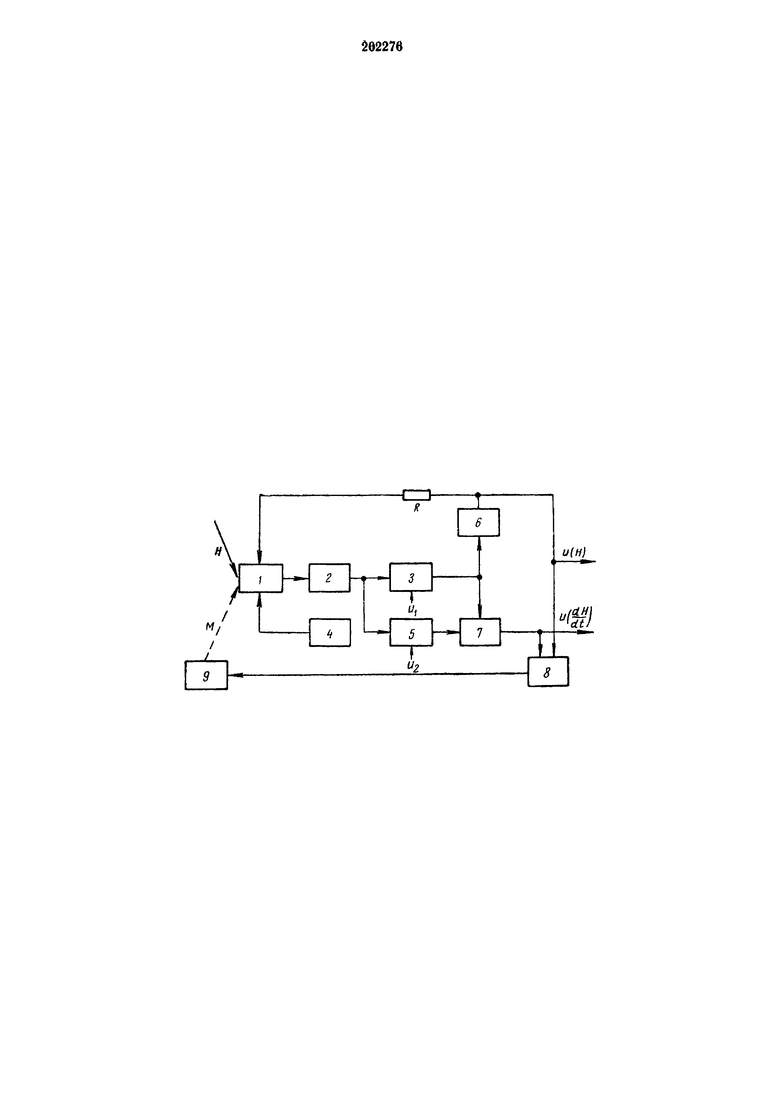
На чертеже дана функциональная схема феррозондовой следящей системы.
Датчиком положения служит феррозонд 1, обладающий направленными свойствами по отношению к вектору магнитного поля и возбуждаемый вспомогательным переменным полем звуковой частоты, создаваемым за счет энергии генератора.
Измеряя проекцию вектора на свою продольную (магнитную) ось, феррозонд вырабатывает сигнал переменного тока удвоенной частоты, который усиливается избирательным усилителем 2 и выпрямляется синхронным детектором 3, питаемым от генератора 4. Сигнал поступает на детектор 5, выделяющий составляющую сигнала, пропорциональную первой производной от возмущения по времени.
В выходной э.д.с. феррозонда содержится две составляющие - синфазная и квадратурная. Синфазная составляющая пропорциональна величине и знаку проекции вектора Н, квадратурная - угловой скорости вращения феррозонда относительно вектора Н. Синфазная составляющая выделяется детектором 3, питаемым напряжением U1, квадратурная - детектором 5, питаемым напряжением U2, сдвинутым по фазе на угол  относительно напряжения U1. Напряжения U1 и U2 синхронизированы по частоте с генератором 4, питающий феррозонд.
относительно напряжения U1. Напряжения U1 и U2 синхронизированы по частоте с генератором 4, питающий феррозонд.
Кроме дополнительного детектора в схему введено инерционное звено 6, включенное в цепь отрицательной обратной связи по действующей на феррозонд проекции поля. Назначение этого звена - препятствовать мгновенной компенсации поля в объеме феррозонда при угловом перемещении последнего относительно вектора поля. В качестве инерционного звена может быть использована, например, линия задержки или интегрирующая цепь.
В схему введен также элемент 7 - перемножающее устройство. На два его входа подается сигнал, пропорциональный скорости вращения феррозонда относительно вектора Н, снимаемый с детектора 5, и сигнал рассогласования, появляющийся на выходе детектора 3 из-за наличия инерционного звена 6, включенного в цепь обратной связи.
Выходное напряжение, снимаемое с перемножителя 7, пропорционально взаимной корреляционной функции от этих сигналов, благодаря чему обеспечивается высокая достоверность получаемой информации о первой производной от возмущения по времени, например, исключаются квадратурные составляющие, обусловленные другими причинами, а не изменением поля.
Таким образом, способ предполагает получение сигнала коррекции в чистом виде, причем без использования усилителей постоянного тока, вносящих погрешности. Сигнал, пропорциональный возмущению, может быть также получен в чистом виде (снят с сопротивления обратной связи). Оба сигнала могут быть поданы на два независимых входа суммирующего элемента 8, управляющего сервомотором 9.
При наличии управляющего тока сервомотором 9 создается механический момент М, поворачивающий феррозонд или всю платформу, на которой он установлен в положение, при котором проекция вектора H на продольную ось феррозонда равна нулю.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПАРАМЕТРОВ МАГНИТНОГОПОЛЯ | 1970 |
|
SU275438A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2010 |
|
RU2441250C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2009 |
|
RU2413235C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ И ПОЛНОГО ВЕКТОРА НАПРЯЖЕННОСТИ ГЕОМАГНИТНОГО ПОЛЯ | 2016 |
|
RU2624597C1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2013 |
|
RU2549545C2 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2010 |
|
RU2437113C2 |
| ФЕРРОЗОНДОВЫЙ ДАТЧИК ДЛЯ СЛЕЖЕНИЯ ЗА СТЫКОМ СВАРИВАЕМЫХ ДЕТАЛЕЙ | 2010 |
|
RU2457476C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОЧИСТНОГО ПОРШНЯ В ТРУБОПРОВОДЕ | 1995 |
|
RU2123896C1 |
Способ коррекции феррозондовых следящих систем, например, следящей системы феррозондового Т-магнитометра путем взаимнокорреляционной фильтрации сигнала, отличающийся тем, что, с целью повышения точности регулирования, сигнал коррекции (первую производную от возмущения по времени) формируют путем выделения квадратурной составляющей э.д.с. феррозонда и перемножения ее с синфазной составляющей, пропорциональной сигналу обратной связи по действующей на феррозонд напряженности магнитного поля.
