Изобретение относится к области измерения угловых параметров магнитного поля с иомощью феррозондов.
Известный способ измерения угловых параметров магнитного поля, основанный на использовании феррозонда, имеет невысокую точность.
Предложенный способ измерения угловых параметров магнитного поля, основанный на использовании феррозонда, магнитная ось которого ориентирована перпендикулярно вектору магнитного поля, отличается от известного тем, что определяют положение магнитной плоскости феррозонда и на рабочей подставке ориентируют эту плоскость перпендикулярно вектору магнитного поля, дополнительно вращая феррозонд вокруг упомянутой магнитной оси.
Магнитная плоскость феррозонда может быть выставлена перпендикулярно оси вращения.
Это позволяет повысить точность измерения угловых параметров магнитного поля, уменьшить амплитуду мешающей квадратурной составляющей второй гармоники, возникающей при непараллельности сердечников дифференциального феррозонда, т. е. квадратурный сигнал феррозонда используется в качестве индикатора совпадения магнитной плоскости зонда о плоскостью, перпендикулярной вектору поля.
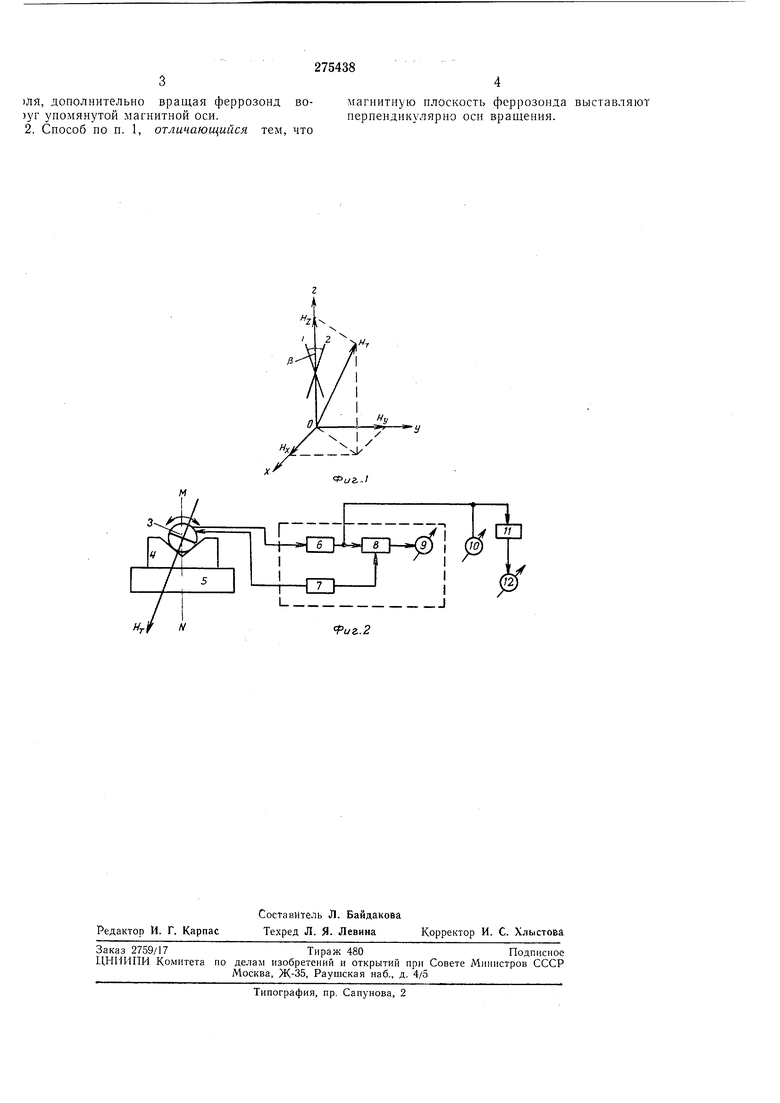
На фиг. 1 представлена векторная диаграмма, свидетельствующая о двузначности диаграммы направленности феррозондов; на фиг. 2 - блок-схема устройства для осуществления способа, поясняющая последовательнокость операций.
Феррозонд содержит два прямых сердечника/и 2, продольные оси которых не параллельны. Если перенести их мысленно параллельно самим себе так, чтобы их оси пересеклись и оказались лежащими в одной плоскости, то указанная плоскость будет являться магнитной плоскостью феррозонда, а биссектриса угла непараллельности р - его магнитной осью. Вектор внещнего поля Нг в выбранной системе координат, жестко связанной с упомянутыми магнитной плоскостью и осью
(ось Z системы X, Y, Z совпадает с магнитной осью феррозонда, а плоскость YOZ совпадает с магнитной плоскостью феррозонда), может быть разложен на три составляющие Я, Ну,
Для достижения максимальной угловой чувствительности феррозонд располагают таким
кости феррозонда, поэтому квадратурная составляющая будет равна нулю ().
Измерение угловых параметров магнитного поля, основанное на определении магнитной плоскости феррозонда, может быть произведено Б геомагнитном поле с номощью стандартного канала (усилительно-преобразовательной схемы), обычно сопрягаемого с феррозондом, и дополнительных приспособлений и измерительных устройств (см. фиг. 2). Феррозонд 3, помещенный в чехол цилиндрического типа, расположен в призматическом ложе 4, которое жестко связано с поворотной подставкой 5, могущей вращаться вокруг вертикальной оси УИЛ. Феррозонд может вращаться вокруг своей продольпой (примерно горизонтальной) оси. Стандартный канал (обведен штриховой линией) содержит: избирательный усилитель (обычно настраиваемый на частоту 2со), генератор 7 частоты ш, синхронный детектор S и измерительный (регистрирующий) прибор 9.
Установка имеет также осциллограф 10, анализатор 11 гармоник и вольтметр 12 анализатора.. Осциллограф 10 и анализатор 11 подключены к выходу- избирательного усилителя 6. В ряде случаев при достаточной избирательности усилителя надобность в анализаторе может отнасть.
Измерение сводится к следующему. Поворотную подставку 5,вместе с призматическим ложем 4 и установленным в нем феррозондом 3 поворачивают вокруг вертикальной оси МЛ до тех пор, пока стрелка измерительного нрибора Я подключенного к выходу синхронного детектора 5 (реагирую1цего на синфазную составляющую напряжения второй гармоники), ие установится на нуле. Уровень напряжения этой составляющей может быть оценен визуально но осциллографу 10 и измерен с помощью апализатора )/ (настраиваемого на вторую гармонику) и вольтметра 12. После того как уровень квадратурной составляющей напряжения на выходе избирательного усилителя зафиксирован, феррозонд поворачивают вокруг его продольной оси на 10-20°. При этом стрелка прибора 9, как правило, отклоняется от нулевой метки щкалы. Для возврата ее на нуль подставку 5 с помощью микрометрического приспособления поворачивают в нужную сторону вокруг вертикальной оси /ИЛ. Затем по осциллографу и вольтметру анализатора устанавливают, уменьщился или увеличился уровень квадратурной составляющей напряжения. Если этот уровень увеличился, то вращение феррозонда вокруг продольной оси следует производить в противоположную сторону. Производя подобные последовательные повороты феррозонда вокруг его продольной оси и каждый раз выставляя стрелку прибора 9 на нуль за счет поворота подставки 5 вокруг вертикальной оси MN, можно достигнуть положения, когда наряду с нулевым показанием прибора 9 окажутся близкими к нулю и показания вольтметра 12. Это положение феррозонда и будет соответствовать случаю, когда
его магнитная плоскость (плоскость угла (3)
окажется перпендикулярной вектору Нг геомагнитного поля (на фиг. 2 магнитная плоскость феррозонда показана жирной линией).
Если известна величина магнитного наклонения-/ - угол, образуемый вектором Нт и линией горизонта, то положение магнитной плоскости феррозонда может быть легко определено. Зафиксировать положение магнитной плоскости можно с ПОМОЩЬЮ рисок, наносимых на повер.хность чехла феррозонда с двух диаметрально противоположных сторон. Зная расположение магнитной плоскости в феррозонде, можно соответствующим образом установить его на рабочей подставке или площадке.
В феррозондовых следящих системах рабочая площадка автоматически ориентируется так, что ее поверхность, на которой расположены ориентирующие феррозонды, оказывается перпендикулярной вектору геомагнитного поля. Ориентирующие феррозонды должны быть установлены на этой площадке таким образом, чтобы их магнитные плоскости совпали с плоскостью площадки. После того как получены мини.мальные показания по вольтметру 12, .можно из.мерить приращение магнитного склонения AD. При этом феррозонд 3 должен быть закреплен в ложе 4 прижимны.м приспособлением, а элементы 10, 11 и 12 отключены от схемы.
В тех случаях, когда по условиям работы производят 180-градусные развороты феррозонда; например в горизонтальной плоскости, магнитную плоскость целесообразно совмещать именно с этой плоскостью. Очевидно, что в этом случае квадратурная составляющая выходной э.д.с. может быть обусловлена лищь горизонтальной составляющей:
f KB С,2 Ни sin sin ,(4)
где HH- горизонтальная составляющая геомагнитного поля. При развороте на 180° фаза квадратурной составляющей э.д.с. изменяет фазу также на 180°. Поэтому, если кв приводит к смещению нуля, то, взяв два последовательных отсчета при О и 180°, можно определить истинное положение магнитного меридиана.
Предмет изобретения
1. Способ измерения угловых параметров магнитного поля, основанный на использовании феррозонда, магнитная ось которого, ориентирована перпендикулярно вектору магнитного поля, отличающийся тем, что, с целью повышения точности измерения, определяют положение магнитной плоскости феррозонда и на рабочей подставке ориентируют эту плоскость перпендикулярно вектору магнитного 3 )ля, дополнительно вращая феррозонд во)уг упомянутой магнитной оси. 2. Способ по п. 1, отличающийся тем, что 4 магнитную нлоскость феррозонда выставляют перпендикулярно оси вращения.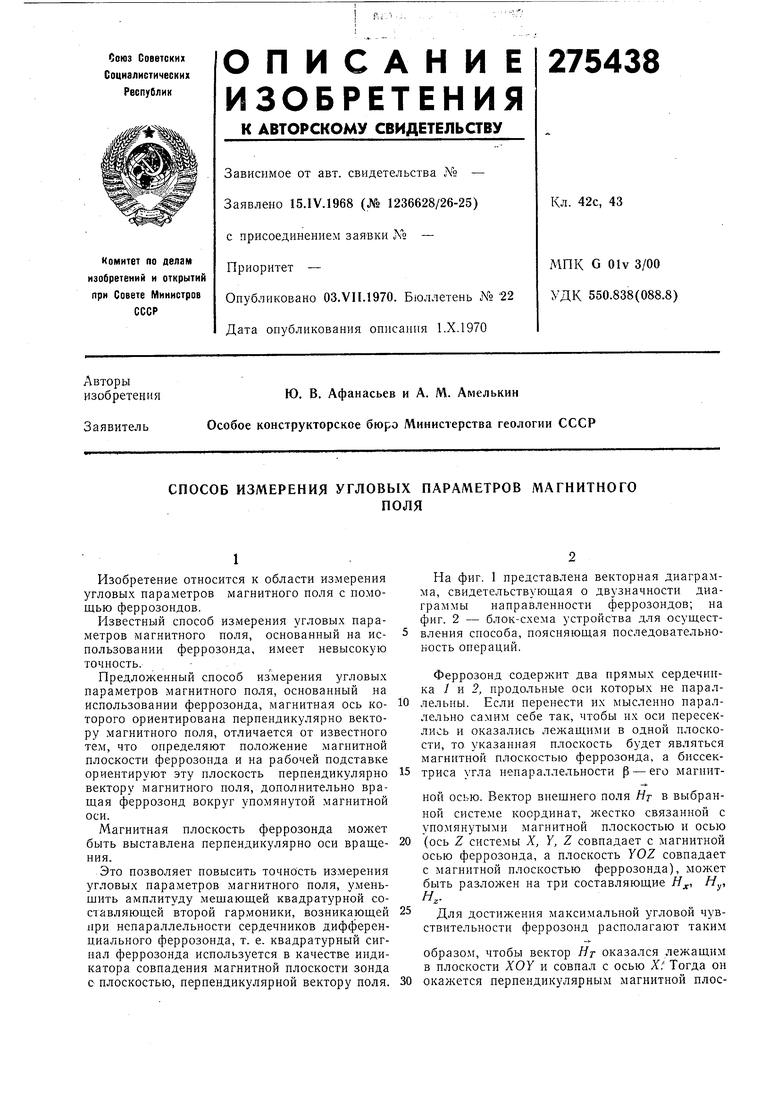

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения составляющей вектора магнитной индукции | 1990 |
|
SU1830493A1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| МАГНИТОМЕТРИЧЕСКИЙ ДАТЧИК | 2002 |
|
RU2235200C2 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ПЕРЕНОСНОМ ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2256930C2 |
| Способ производственного контроля характеристики преобразования феррозонда | 2019 |
|
RU2723154C1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| Формирователь геомагнитного репера | 1983 |
|
SU1137191A1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНЫХ ФЕРРОЗОНДОВЫХ МАГНИТОМЕТРОВ | 2022 |
|
RU2793283C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |