Известны синхронно следящие системы дистанциОнной передачи .пространственных углов, датчик и приемник которых содержат цилиндрический статор с обмотками, центральный магнитопровод, помещенную в зазоре между .ними обмотку И карданный подвес.
Предложенное устройство отличается тем, что роторы датчика и приемника неподвижно укреплены на внутренних рамках карданных подвесов, внешние рамки которых связаны со статорами, а неподвижные цилиндрические обмотки датчика н приемника, расположенные в зазоре между ротором и статором, жестко закреплены на каждом статоре и соединены в последовательный контур.
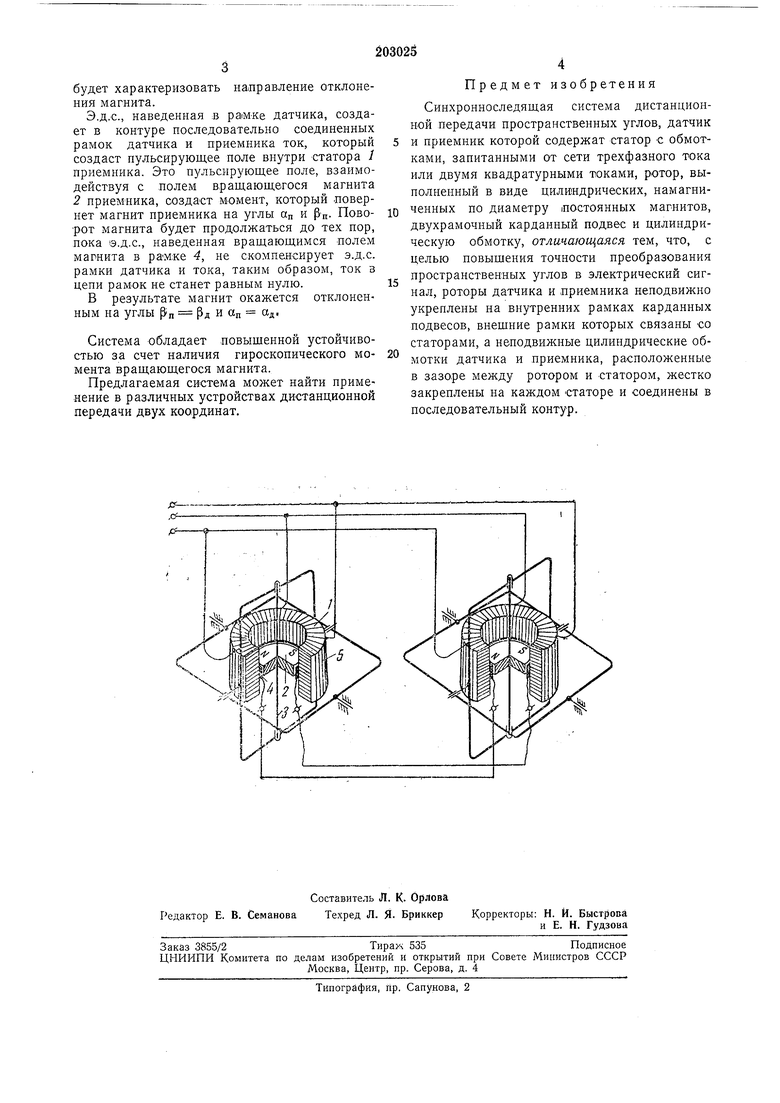
На чертеже представлена схема предлагаемой синхронно следящей -системы, состоящей из идентичных датчика и приемника.
Внутри статора / размещается ллоский круглый постоянный магнит 2, намагниченный по диаметру. При этом магнит подвешен при помощи карданного подвеса 3 так, что имеет три степени свободы. В положении начального равновесия ось магнита совпадает с осью статора. Кроме магнита внутри статора размещена рамка 4, .расположенная в середине статора, жестко скрепленная с ним. Ось рамки совпадаете осью центрального магнитопровода и плоскость рамки совпадает с плоскостью постоянного магнита в случае, когда
магнит находится в положении начального равновесия.
На статоре 1 размещается распределенная или сосредоточенная обмотка 5 (на рисунке - распределенная), которая питается либо от сети трехфазного тока, либо двумя ортогональными напряжениями (на рисунке питание трехфазное).
Рамки 4 датчика и приемника соединены
между собой в последовательный контур. Принцип действия системы следующий. При подключении к обмоткам статора напряжения возбуждения внутри статора создается вращающееся магнитное поле, которое
взаимодействует с полем постоянного магнита и увлекает последний за собой. Через некоторое время постоянный магнит будет вращаться вокруг оси с той же скоростью, что и вращающееся магнитное поле.
Если вращение магнита происходит в плоскости начального положения, то в рамках 4 датчика и приемника электродвижущие силы не наводятся. В случае, если вращающийся магнит 2 отклоняется от положения равновесия, поворачиваясь на углы ад и рд вокруг осей карданного подвеса, в рамке 4 датчика наведется Э.Д.С., амплитуда которой будет пропорциональна углу отклонения магнита от положебудет характеризовать налравление отклонения магнита.
Э.Д.С., наведенная в раМКе датчика, создает в контуре носледовательно соединенных рамок датчика и приемника ток, который создаст пульсирующее поле внутри статора / приемника. Это пульсирующее поле, взаимодействуя с полем вращающегося магнита 2 приемника, создаст момент, который повернет магнит приемника на углы Сп и Р-П. Поворот магнита будет продолжаться до тех пор, пока Э.Д.С., наведенная вращающимся полем магнита в рамке 4, не скомпенсирует э.д.с. рамки датчика и тока, таким образом, ток з цепи рамок не станет равным нулю.
В результате магнит окажется отклоненным на углы рп Рд и «п «дСистема обладает повыщенной устойчивостью за счет наличия гироскопического момента вращающегося магнита.
Предлагаемая система может найти применение в различных устройствах дистанционной передачи двух координат.
Предмет изобретения
Синхронноследящая система дистанционной передачи пространственных углов, датчик и приемник которой содержат статор с обмотками, запитанными от сети трехфазного тока или двумя квадратурными токами, ротор, выполненный в виде цилиндрических, намагниченных по диаметру постоянных магнитов, двухрамочный карданный подвес и цилиндрическую обмотку, отличающаяся тем, что, с целью повышения точности преобразования пространственных углов в электрический сигнал, роторы датчика и .приемника неподвижно укреплены на внутренних рамках карданных подвесов, внешние рамки которых связаны со статорами, а неподвижные цилиндрические обмотки датчика и приемника, расположенные в зазоре между ротором и статором, жестко закреплены на каждом статоре и соединены в последовательный контур.