(54) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угловых перемещений | 1976 |
|
SU728150A1 |
| Устройство для дистанционной передачи перемещений | 1982 |
|
SU1062755A1 |
| Устройство для дистанционной передачи пространственных перемещений | 1976 |
|
SU624253A1 |
| УСТРОЙСТВО ДЛЯ СИНХРОННОЙ ПЕРЕДАЧИ ПЕРЕМЕЩЕНИЙ С ОГРАНИЧЕННЫМ УГЛОМ ПОВОРОТА ПРИЕМНИКА | 1939 |
|
SU59007A1 |
| Бесконтактный электрический датчик линейных перемещений | 1957 |
|
SU116599A1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| Индукционная система синхронной передачи угла поворота | 1935 |
|
SU48684A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| Линейный сельсин | 2017 |
|
RU2678724C1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2004 |
|
RU2273942C1 |
I
Изобретение относится к автоматическим устройствам контроля и управления и может быть использовано в устройствах для дистанционной передачи перемещений в прямоугольной системе координат.
Известно устройство дистанционной передачи, содержащее датчик и приемник, кяждый из которых содержит статор, на котором расположена обмотка, соединенная с трехфазной сетью, внутри статора размещены.ротор, выполненный в виде круглого постоянного магнита и подвешенный в карданном подвесе с тремя системами свободы, и рамка, жестко соединенная со статором, датчик и приемник соединены линией связи l Недостатком устройства является недостаточно высокая мощность.
Известно устройство для дистанционной передачи перемещений,в котором в качестве датчика и приемника применены Преобразователь, содержашд- Й
три неподвижных магнитопровода, образующие статор и расположенные друг относительно друга под углом 120, полюсные наконечники которых выполнены в виде сферической поверхности С-образной формы и подвижного магнитопровода, тоже выполненного в виде сферической поверхности и закрепленного на рычаге с шарнирным креплением в случае применения в качестве датчика или на консольной цилиндрической пружине влл случае применения в качестве приемника. На неподвижных магнитопроводах находятся катушки возбуждения, присоединенные к трехфазной сети по схеме звезда, и три рабочих катушки включенные последовательно меяоду собой по схеме открытого треугольника 2 .
Недостатком известного устройства является невысокая мощность на единицу поверхности подвижной части, следовательно большие габариты.
Цель изобретения - уменьшение габаритов устройства для дистанционной передачи перемещений.
Поставленная цель достигается те что в устройстве для дистанционной передачи перемещений, содержащем датчик и приемник, каждый из которых выполнен в виде статора с трехфазными обмотками возбуждения, подсоединенными к трехфазной сети по схеме звезда без нулевого провода, и тремя катушками рабочей обмотки, соединенными последовательно между собой по схеме открытого треугольника, и подвижной части, датчик и приемник соединены линией связи, стторы датчика и приемника выполнены в виде секторных магнитопроводов П-образного сечения,расположенных таким образом, что образуют два круга, между которыми размещена подвижная часть, выполненная в виде кргуа меньшего диаметра из ферромагнитного материала.
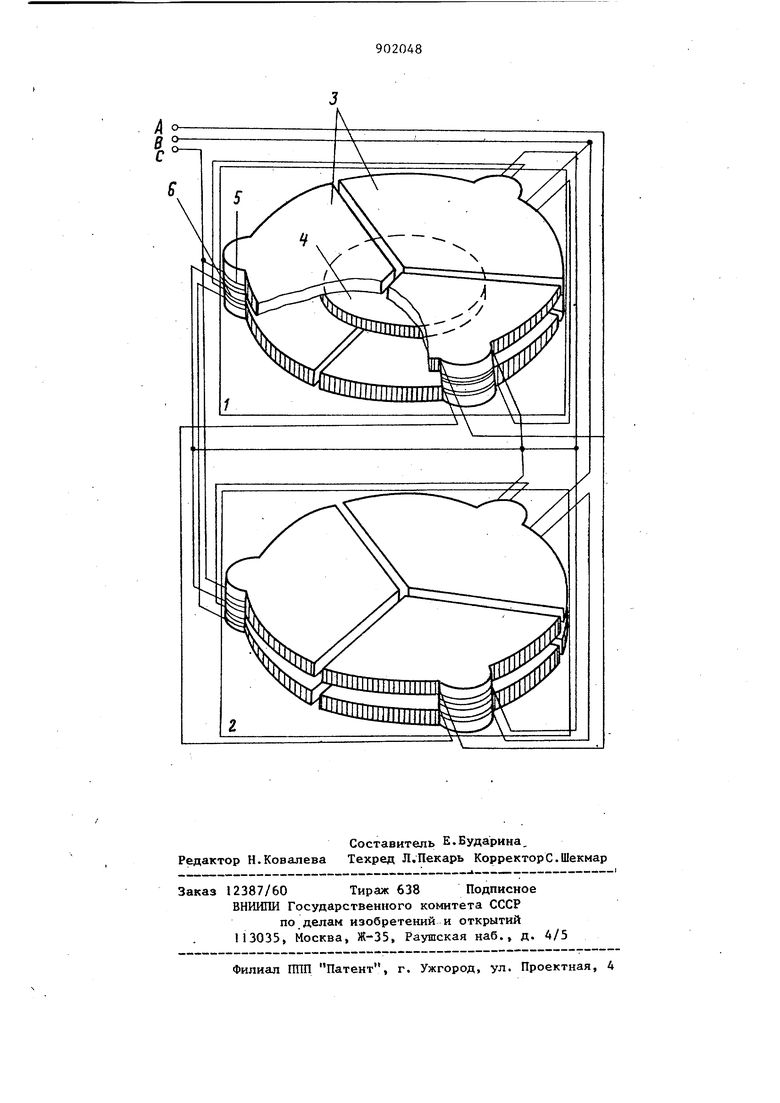
На чертеже изображено устройство для дистанционной передачи перемещений, структурная схема.
Устройство содержит одинаковые датчик I и приемник 2, каждый из которых состоит из статора 3, подвижной части 4, обмоток 5 возбуждения и катушек 6 рабочей обмотки.
Устройство работает следующим образом.
При отклонении подвижной части 4 датчика 1 от нулевого положения на некоторое расстояние в плоскости происходит изменение взаимных индуктивностей между обмотками 5 возбуждения и катущками 6, вследствие чего на выходных клеммах рабочей обмотки возникает напряжение, амплитудное значение которого пропорционально величине отклонения, а фаза напряжения зависит от азимута подвижной части 4. В свою очередь напряжение
020484
рабочей обмотки датчика 1 создает ток в рабочей обмотке приемника 2, KOTopbrii,взаимодействуя с потоком
возбуждения, создает силу, действующую на подвижную часть 4 приемника 2 таким образом, что она занимает положение, аналогичное положению .подвижной части 4 датчика 1.
Использование изобретения позвоto ляет снизить себестоимость устройства за счет уменьшения габаритов при сохранении мощности,либо повьппает мощность без увеличения его габаритов.
15
Формула изобретения
Устройство для дистанционной пеJJ редачи перемещений, содержащее датчик и приемник, каждый из которьгх выполнен в виде статора с трехфазными обмотками возбуждения, подсоединенными к трехфазной сети по схеме звезда
2 без нулевого провода, и тремя катушками рабочей обмотки, соединеннь1ми последовательно между собой по схеме открытого треугольника, и подвижной части, датчик и приемник соединены линией связи, отличающе0еся тем, что, с целью уменьшения габаритов устройства, в нем статоры датчика и приемника выполнены в виде секторных магнитопроводов П-образного сечения, расположенных таким образом,
5 что образуют два круга, между которыми размещена подвижная часть, выполненная в виде круга меньшего диаметра из ферромагнитного материала. Источники информации,
40 принятые во внимание при экспертизе
45 кл. &08 С 19/00, 1976 (прототип).
