1
Изобретение относится к области дистанционной передачи пространственных углов в автоматических устройствах контроля и управления, а именно, к синхронно-с.ледящим устройствам для дистанционной передачи угловых перемещений.
Известно синхронно-следящее устройство дистанционной передачи пространственных углов, содержащее датчик и приемник,которые имеют статры с распределенными трехфазными обмотками возбуждения и внутри каждого статора - по круглому намагниченному по диаметру постоянному магниту 1. Эти магниты (каждый) подвешены на статорах, в средней их части размещены цилиндрические катушки, соединенные последовательно одна с другой и подключенные ко входу усилителя, на постоянном магните приемника .размещены две круглые рабочие полукатушки, также соединенные последовательно между собой и подключенные ко входу усилителя.
Недостатками этого устройства являются сложность как в конструктивном, так и в схемном отношении, и невысокий синхронизирующий момент,
Наиболее близким техническим решением к данному изобретению является устройство для Дистанционной передачи пространственных перемещений, содержащее датчик и приемник, выполненные в виде подвижных магнитопроводов и неподвижных магнитопроводов с секционными обмотками возбуждения, подключенных через трансформатор к ши0нам питания, и с секционными обмотками синхронизации, соединенными встречно, в котором подвижные магнитопроводы датчика и приемника выполнены в виде куба, против граней ко5торого расположены по шесть П-образных неподвижных магнитопроводов, на каждом из которых расположены по одной секции обмотки синхронизации и обмотки возбуждения, все секций обмотки
0 синхронизации соединены последовательно согласно, а все секции обмотки возбуждения соединены попарно встречно, средние точки соединения каждой пары секций обмотки возбуж5дения соединены с втор - чными обмотками трансформатора 2. ,
Недостаток этого устройства - недостаточно высокая точность и невысокий синхронизирующий момент.
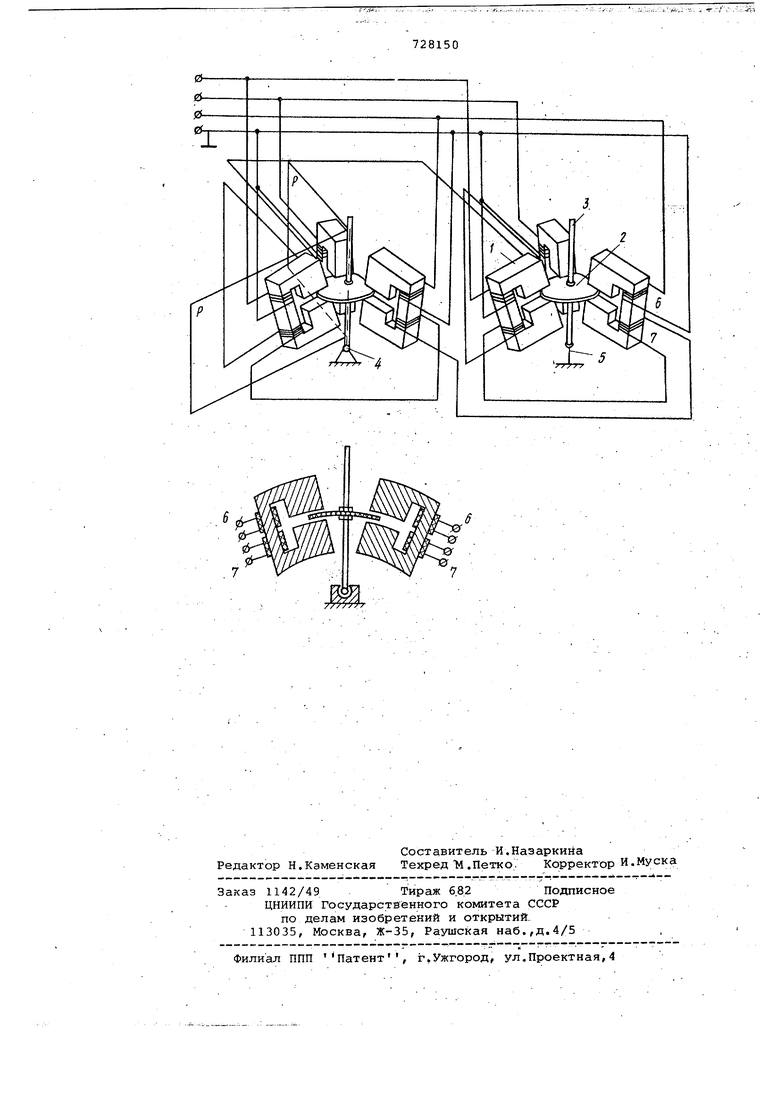
0 : Цель, изобретегтия СОСТОИТ в повьтш нии синхронизирующею момента и точ ности передачи угловых перемещений. Поставленная цель достигается засчет того, что в предлагаемом ус ройстве для дистанционной передачи угловых перемещенкй статоры датчика и приемника выполнены в виде трех С . образных магнитопроводов, расположе ных под углом 120 один к другому, , рабочие поверхности полюсных наконечников которых выполнены сферичес ми, роторы датчика и приемника выпол нены в виде полых сегментов, ротор датчика закреплен на шарнире, а ротор приемника - на консольной цилин дрической пружине. . На чертеже приведена структурная схема устройства для дистанционной передачи угловых перемещений, где в качестве датчика и приемника перемещений служат ферродинамические преоб разователи с одинаковыми геометрическими и электрическими параметра.МИ. ;. -,-:., Устройство содержит три неподвижн магнитопровода 1, образующие статор и расположенные один относительно другого под углом 120, полюсныё наконечники которыхвыполнены в виде сферической поверхности, и . подвижного магнитопровода 2, также выполненного в виде сферической по- . верхнос тй и .зак рёттлёнйого на рычаге 3 с шар нирным креплением 4,в случае применения в качестве датчйка,. или на; консольной цилиндрической гшужй не 5 -в случае применения в качеств приемника, -На неподвижных магнитопроводах 1 находятся три секции катушки возбуждения б, присоединеннйе по схеме звезда к трехфазной сети, и три секции рабочих катуиек 7, включенные последовательно между собой. Принцип работы устройства, заключается в следующем,; При отклонении подвижной части датчика от нулевого положения на некоторый пространственный угол происходит изменение взаимных индуктивностей. между катушка 5и возбуждени
728150 6 и рабочими катушк;ами 7,, вследствие чего на выходных клеммах рабочих катушек 7 возникает напряжение, амплитудное значение которого пропорционально величине отклонения, а фаза напряжения зависит от подвижной части. В свою очередь напряжение рабочей катушки 7 датчика создает ток в рабочей катутлке 7 приемника, который взаимодействуя с потоком возбуждения, создает момент/действующийна подвижную часть приемника таким образом, что она занимает .положение, аналогичное подвижной части датчика. Величина отклонения подвижной части приемника при этом зависит еще от жесткости консольной пружины,. которая может быть подобрана так, чтобы положения подвижных частей датчика и приемника полностью соот..ветствовали. Формула изобретения Устройство для дистанционной передачи угловых перемещений, содержащее датчик и приемник, соединенные линией связи и выполненные в виде ротора и статора с трехфазными обмоткайи возбуждения и однофазными рабочими обмотка №, оТлич а ю щ е е с я тем, чтоу с Целью увеличения синйронизирующего момента и повышения т.рчности работы, ставторы датчика и приемника выполнены в виде трех С-образных магнитопроводов, расположенных под углом 120 один к другому, рабочие поверхности полюсных наконечников которых выполнены сферическими, роторы датчика и приемника выполнены в виде полых сегментов, ротор датчика закреплен на шарнире, ротор приемника - на консольной цилиндрической пружине. ... Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 216814, кл.С 08 С 9/04, 1967. 2.Авторское свидетельство по заявке № 2415482/18-24, кл.С 08 С 9/04, 25.10,76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угловых перемещений | 1981 |
|
SU964695A1 |
| Устройство для дистанционной передачи перемещений | 1980 |
|
SU902048A1 |
| Устройство для дистанционной передачи перемещений | 1982 |
|
SU1062755A1 |
| Устройство для дистанционной передачи пространственных перемещений | 1976 |
|
SU624253A1 |
| Линейный сельсин | 2017 |
|
RU2678724C1 |
| Сельсин | 1977 |
|
SU684683A1 |
| БЕСКОНТАКТНЫЙ СОВМЕЩЕННЫЙ СЕЛЬСИН-ДВИГАТЕЛЬ(МОТОСИН) | 1970 |
|
SU287176A1 |
| Устройство для дистанционной передачи перемещений | 1984 |
|
SU1180954A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 1973 |
|
SU399785A1 |
| СИНХРОННО СЛЕДЯЩАЯ СИСТЕМА ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ПРОСТРАНСТВЕННЫХ УГЛОВ | 1967 |
|
SU203025A1 |