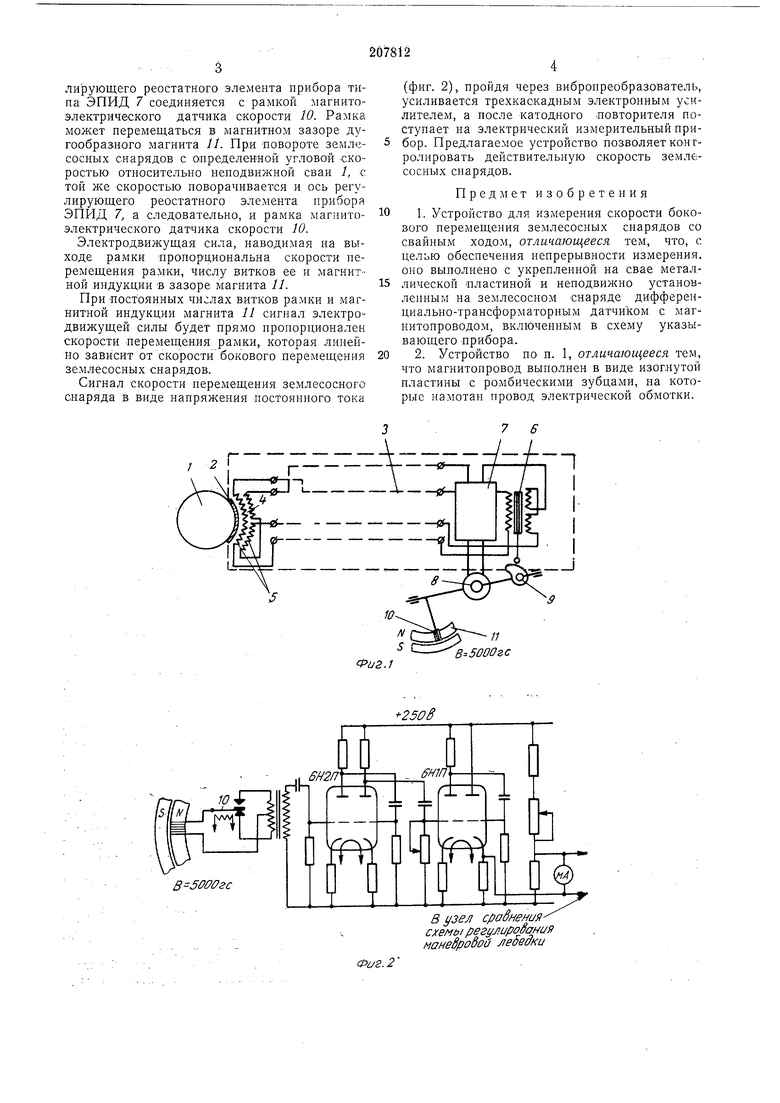
Известные устройства для измерения скорости бокового леремещения землесосных снарядов по скорости вращения барабана носовой лебедки, а также по изменению угла между осью землеснаряда и ориентированным гидроскопическим датчиком, не обеспечивают непрерывность процесса контроля. Предл1агаемое устройство устраняет указанные недостатки. Достигается это тем, что оно выполнено с укрепленной на свае металлической пластиной и неподвижно установленным на землесосном снаряде дифференциально-трансформаторным датчиком с магнитопроводом, включенным в схему указывающего прибора. Магнитопровод может быть выполнен в виде изогнутой пластины с ромбическими зубцами, на которые намотан провод электрической обмотки. На фиг. 1 изображена схема предлагаемого устройства; на фиг. 2 - схема усиления сигнала скорости магнитоэлектрического датчика. Устройство включает сваю / с металлической пластиной 2, дифференциально-трансформаторный датчик 3 и магцитопровод 4. Чтобы сигнал дифференциально-трансформаторного датчика 3 имел линейную зависимость, зубцн 5 магнитопровода 4 выполнены ромбического профиля. Электрические данные дифференциальнотрансформаторного датчика 3 согласовываются с параметрами дифференциально-трансформаторного нриемЕика плунжерного типа 6, встроенного во вторичный прибор, например, типа ЭПИД7. При перемещении землесосного снаряда по забою его понтон будет поворачиваться относительно неподвижно сидящей в грунте сваи /. Это вызовет перемещение сегментного магнитопровода с катушкой дифференциальнотрансформаторного датчика 3 относительно металлической пластины 2 на свае /. В зависимости от направления вращения снаряда напряжение на зажимах вторичных обмоток будет изменяться, что вызовет появление сигнала на входе усилителя прибора ЭПИД 7. При этом включается асинхронный конденсаторный двигатель 8 c eдящeй системы, который поворотом эксцентрикового кулачка 9 производит перемещение плунжера дифференциально-трансфор1маторного приемника 6 до компенсации напряжений между вторичными обмотками. Иными словами, прибор типа ЭПИД производит отработку угла поворота земснаряда относительно неподвижной сваи / со скоростью, пропорциональной скорости бокового перемещения земснаряда. Для получения сигнала скорости бокового