В настоящее время глубина погружения скважинного прибора определяется, главным образом, по длине смотанного с барабана и опущ,енного в скважину кабеля, а данные о ней снимают с блок-баланса датчиком глубины.
Известен способ определения глубины погружения скважинного снаряда путем измерения величины разности фаз электромагнитных колебаний, возбуждаемых в кабеле у устья скважины и ретранслированных от его нижнего конца.
Предлагаемый способ также решает задачу определения истинной глубины нахождения скважинного снаряда в скважине благодаря обеспечению возможности определения мгновенной скорости спуска снаряда в скважине путем вычисления максимума корреляционной функции сигналов от двух идентичных геофизических регистраторов естественного или искусственно наведенного потенциального или скалярного поля, разнесенных на постоянную базу измерения. При этом в один из измерительных каналов вводится задержка во времени, величина которой определяется также по данным максимальной корреляцио-нной функции. Глубину погружения снаряда определяют путем интегрирования значения мгновенной скорости во времени.
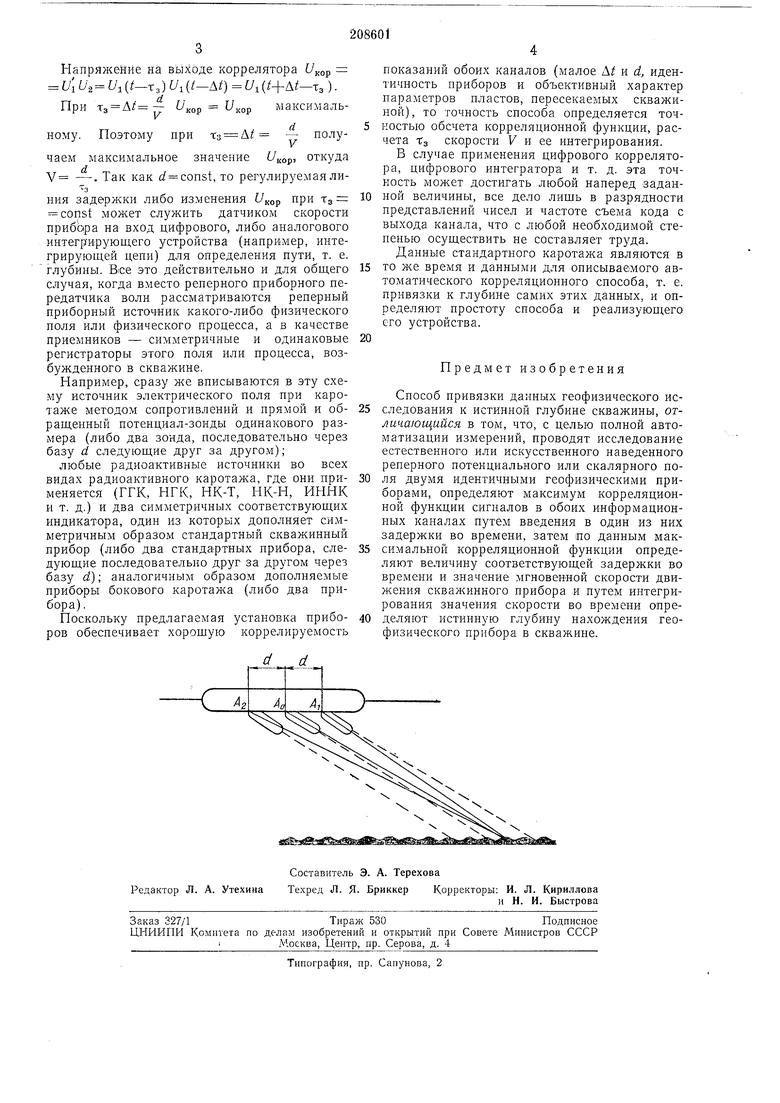
В случае определения скорости спуска снаряда при регистрации отраженного от стенки скважины сигнала в скважинном снаряде устанавливают передатчик Ло и два идентичных
приемника AI и А-2, имеющих одинаковую диаграмму направленности. Приемники разнесены симметрично относительно передатчика на расстояние d и одновременно принимают отраженный сигнал.
Амплитуда сигнала непостоянна из-за движения прибора, неоднородностей среды, шероховатостей стенок скважины, поэтому после детектирования сигнала, принятого приемником AI, получим расположение напряжения
Ui(t. Через время At - взаимное расположение приемника А и реперного передатчика АО повторит прежнее расположение приемника AI и передатчика Ло. Поэтому на выходе канала AZ напряжение будет Uz (t) Uz(t-}-fAO i(0; ясно, что Uz(t)Ui(t-M.
С первого канала напрялсение lli(t) с помощью линии задержки трансформируется в напряжение U-i (t-r) i (i).
Оба напряжения Ui (f) и Uzit) поступают на коррелятор, который определяет их взаимную корреляционную функцию, т. е. величину t/Kop (с усреднение во времени). Напряжение на выходе коррелятора , U,(,)U,(t-At} U,(t+At-r,). При V максимальт:з А - полуному. Поэтому нри чаем максимальное значение , откуда V -. Так как af const, то регулируемая линия задержки либо изменения t/кор при Тз const может служить датчиком скорости нрибЬра на вход цифрового, либо аналогового интегрирующего устройства (нанример, интегрирующей цепи) для определения пути, т. е. глубины. Все это действительно и для общего случая, когда вместо ренерного приборного передатчика волн рассматриваются реперный приборный источник какого-либо физического ноля или физического процесса, а в качестве приемников - симметричные и одинаковые регистраторы этого ноля или процесса, возбужденного в скважине. Папример, сразу же вписываются в эту схему источник электрического поля нри каротаже методом сопротивлений и прямой и обращенный потенциал-зонды одинакового размера (либо два зонда, последовательно через базу d следующие друг за другом); любые радиоактивные источники во всех видах радиоактивного каротажа, где они нрименяется (ГГК, ПГК, ПК-Т, НК-П, ИННК и т. д.) и два симметричных соответствующих индикатора, один из которых донолняет симметричным образом стандартный скважинный прибор (либо два стандартных прибора, следующие последовательно друг за другом через базу d); аналогичным образом дополняемые приборы бокового каротажа (либо два прибора). Поскольку предлагаемая установка приборов обеспечивает хорощую коррелируемость показаний обоих каналов (малое Д и d, идентичность приборов и объективный характер параметров пластов, пересекаемых скважиной), то точность способа определяется точиостью обсчета корреляционной функции, расчета тГз скорости V и ее интегрирования. В случае применения цифрового коррелятора, цифрового интегратора и т. д. эта точность может достигать любой наперед заданной величины, все дело лип1ь в разрядности представлений чисел и частоте съема кода с выхода канала, что с любой необходимой степенью осуществить не составляет труда. Данные стандартного каротажа являются в то же время и данными для оннсываемого автол1атического корреляционного способа, т. е. привязки к глубине самих этих данных, и определяют простоту способа и реализуюп1,его его устройства. Предмет изобретения Снособ привязки данных геофизического исследования к истинной глубине скважины, отличающийся в том, что, с целью полной автоматизации измерений, проводят исследование естественного или искусственного наведенного реперного потенциального или скалярного поля двумя идентичными геофизическими приборами, определяют максимум корреляционной функции сигналов в обоих информационных каналах путем введения в один из них задержки во времени, затем по данным максимальной корреляционной функции определяют величину соответствующей задержки во времени и значение мгновенной скорости движения скважинного прибора и путем интегрирования значения скорости во времени онределяют истинную глубину нахождения геофизического прибора в скважине.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ИСТИННОЙ ГЛУБИНЫ НАХОЖДЕНИЯ СКВАЖИННОГО ПРИБОРА | 1968 |
|
SU206472A1 |
| Способ выделения и оценки нефтегазоносных пластов-коллекторов | 1981 |
|
SU1013886A1 |
| Способ согласования данных каротажа по глубине скважин | 1983 |
|
SU1168704A1 |
| УСТРОЙСТВО ДЛЯ АКУСТИЧЕСКОГО КАРОТАЖА СКВАЖИН | 1973 |
|
SU399815A1 |
| СПОСОБ ИНДУКЦИОННОГО КАРОТАЖА СКВАЖИН В ПРОЦЕССЕ БУРЕНИЯ | 2011 |
|
RU2466431C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ЗОНДА ДЛЯ ПРИБОРА НА ОСНОВЕ ИНДУКЦИИ ИЛИ РАСПРОСТРАНЕНИЯ С ПОПЕРЕЧНЫМИ ИЛИ ТРЕХОСНЫМИ МАССИВАМИ | 2004 |
|
RU2401442C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДАЛЬНОСТИ С МОДУЛИРОВАННОЙ СМЕЩЕННОЙ НЕСУЩЕЙ | 2016 |
|
RU2708383C2 |
| Устройство для акустического каротажа скважины | 1985 |
|
SU1520460A1 |
| Устройство акустического каротажа | 1977 |
|
SU693309A1 |
| СПОСОБЫ И СИСТЕМЫ НАСТРОЙКИ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА КАРОТАЖНЫХ РАБОТ | 2013 |
|
RU2642602C2 |
