Изобретение относится к устройствам управления электроприводом постоянного тока по системе Г-Д с магнитным усилителем и критическим самовозбуждением генератора, который приводят во вращение механизмы с большим моментом инерции и незначительным моментом сопротивления, например механизмы платформ и столов, которые несут на себе рабочее оборудование и совершают в основном установочные перемещения. Такие механизмы обычно соединены с приводным двигателем через редукторы с высоким передаточным отношением, которые в силу конструктивных особенностей имеют зазоры между передачами. В режимах разгона и торможения механизма за время выбора зазора двигатель успевает существенно увеличить или снизить свою скорость, поскольку он при этом не связан с механизмом. Следовательно, за это время его якорь, имеющий значительно меньшую инерцию, чем механизм, успевает существенно изменить запас кинетической энергии. Поэтому по окончании выбора зазора происходит соударение с механизмом, так как последний из-за значительной инерции не может резко изменить свою скорость.
В предлагаемом устройстве использован транзистор, управляемый через релейный элемент сигналом, пропорциональным току привода, который подключен переходом эмиттер-коллектор параллельно части балластного сопротивления. Такое выполнение устройства позволяет снизить удары в передачах при выборе зазоров путем ограничения запаса кинетической энергии двигателя, так как в электроприводе по системе Г-Д с критическим самовозбуждением темп изменения э.д.с. генератора зависит от величины балластного сопротивления магнитного усилителя, питающего обмотку возбуждения генератора.
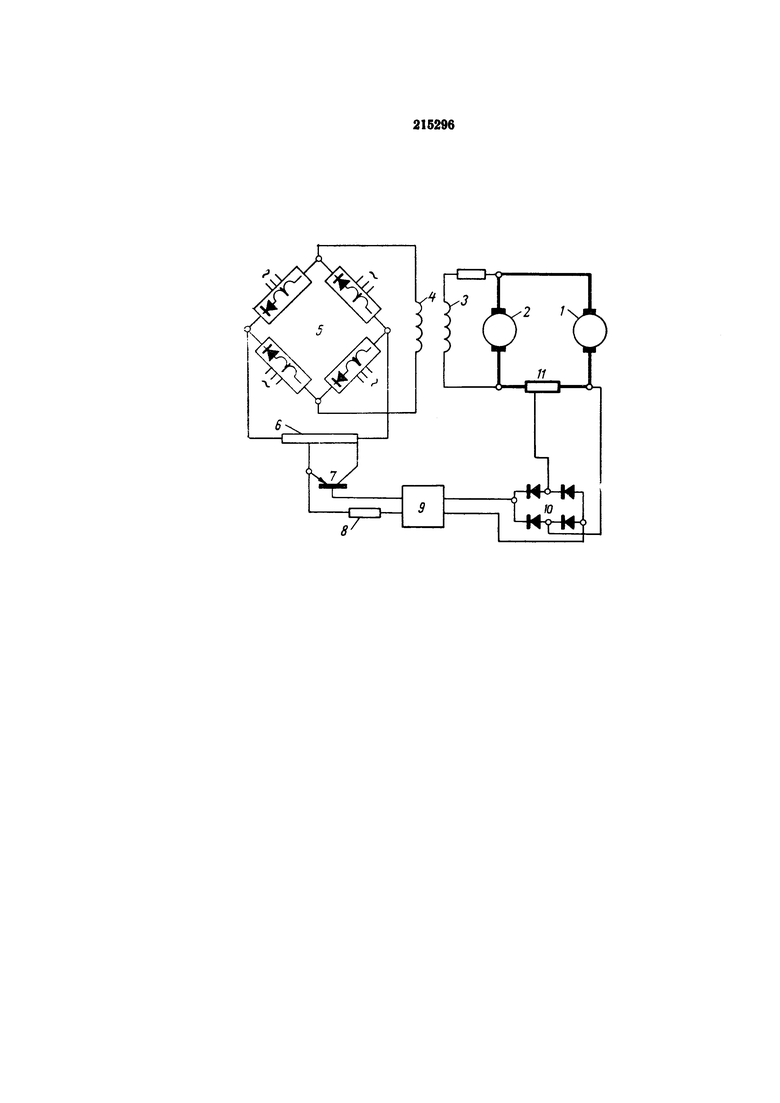
На чертеже представлена схема предлагаемого устройства.
Переходный процесс нарастания и спадания напряжения у генератора с критическим самовозбуждением определяется формулой
где Ег - э.д.с. генератора;
mн - коэффициент усиления обмотки независимого возбуждения;
Тг - суммарная постоянная времени;
Uн - напряжение на обмотке независимого возбуждения.
При неизменном Uн скорость нарастания и спадания напряжения генератора постоянна, т.е. переходный процесс носит равномерно ускоренный характер.
Ток в обмотке независимого возбуждения при ее включении на напряжение Uн устанавливается скачком и в течение времени нарастания и спадания напряжения генератора остается неизменным, и входное сопротивление обмотки независимого возбуждения, являющееся нагрузкой магнитного усилителя в динамике, определяется формулой

Если величина балластного сопротивления магнитного усилителя является оптимальной, т.е. равна величине входного сопротивления обмотки независимого возбуждения rвх, то в переходном процессе напряжение усилителя будет полностью реализовано, и нарастание э.д.с. генератора произойдет за минимальное время. С другой стороны, если величина балластного сопротивления будет выше оптимальной, то напряжение усилителя перераспределяется таким образом, что меньшая часть придется на обмотку независимого возбуждения, а большая - на балластное сопротивление. При этом скорость нарастания Ег уменьшится. Таким образом, изменением величины балластного сопротивления можно изменять скорость нарастания напряжения генератора с критическим самовозбуждением и, следовательно, темп разгона и торможения привода.
Приводной двигатель 1 питается от генератора 2. Генератор имеет две обмотки возбуждения - параллельную 3 и независимую 4. Обмотка 4 питается от реверсивного магнитного усилителя 5 с балластным сопротивлением 6. Обмотки управления усилителя 5 на чертеже не показаны.
Часть сопротивления 6 шунтируется переходом эмиттер-коллектор транзистора 7, работающего в ключевом режиме. Переход эмиттер-база этого транзистора через сопротивление 8 включен на выход полупроводникового реле 9. При переключении реле соответственно переключается транзистор 7. В состоянии насыщения он шунтирует часть балластного сопротивления 6.
Управление работой реле 9 осуществляется через выпрямительный мост 10 падением напряжения на участке якорной цепи, пропорциональным току двигателя. В качестве элемента 11 измерения тока может быть использовано сопротивление или трансформатор постоянного тока. В последнем случае необходимости в выпрямительном мосте 10 нет.
В режиме разгона привода, когда выбирается зазор в передаче, пусковой ток двигателя незначителен: он определяется, в основном, моментом инерции двигателя. Реле 9 при этом отключено, транзистор 7 находится в состоянии отсечки, а балластное сопротивление 6 полностью введено. Величина балластного сопротивления в этом режиме выбирается из расчета обеспечения такой скорости нарастания э.д.с. генератора, и следовательно ускорения двигателя, при которой запас кинетической энергии за время выбора зазора не приводил бы к ударам в передаче. После окончания выбора зазора двигатель соединяется с механизмом, момент инерции, приложенный к его валу, резко возрастает, и это, в свою очередь, приводит к возрастанию тока в якорной цепи и срабатыванию реле, что переводит транзистор 7 в режим глубокого насыщения. Переход эмиттер-коллектор этого транзистора шунтирует часть балластного сопротивления 6. Часть этого сопротивления, остающаяся включенной, выбрана такой по величине, чтобы обеспечить необходимый с точки зрения нормальной работы механизма темп нарастания напряжения генератора. При выборе рабочей точки магнитного усилителя на середине прямолинейного участка его характеристики ток балластного сопротивления изменяется незначительно, что обеспечивает четкую работу транзистора 7.
В режиме торможения привода балластное сопротивление снова полностью вводится.
Устройство для управления электроприводом постоянного тока механизмов с большим моментом инерции, выполненным по системе Г-Д с критическим самовозбуждением и питанием обмотки независимого возбуждения генератора от реверсивного магнитного усилителя с балластным сопротивлением, отличающееся тем, что, с целью повышения надежности работы привода и механизма, использован транзистор, управляемый через релейный элемент сигналом, пропорциональным току привода, который подключен переходом эмиттер-коллектор параллельно части балластного сопротивления.
