1
Изобретение относится к способам управления электроприводами механизмов с большими моментами инерции и с люфтом в кинематической передаче.
Момент приводного двигателя таких механизмов в переходных режимах пуска и останова имеет в основном динамическую составляющую, необходимую для преодоления инерции движущихся масс.
Редукторы, соединяющие двигатель с механизмом, в силу конструктивных особенностей обычно имеют люфт в передаче. При высоких значениях передаточного числа, что имеет место при многоступенчатых редукторах, люфт достигает значительной величины. Поэтому на некоторое время разгона, а также торможения двигатель выходит из сцепления с механизмом. Поскольку якорь двигателя имеет значительно меньший момент инерции, чем сам механизм, он за это время успевает существенно увеличить (при разгоне) или снизить (при торможении) свою скорость, а следовательно, и запас кинетической энергии. После окончания выбора люфта двигатель входит в зацепление с механизмом, причем этот процесс сопровождается ударом из-за различия скоростей двигателя и механизма, а также вследствие того, что механизм из-за значительного момента инерции не может резко изменить-свою скорость.
При вхождении в зацепление скорости двигателя и механизма выравниваются за счет перехода кинематической энергии двигателя, запасенной при выборе зазора, в потенциальную энергию деформаций, что может вывести механизм из строя.
В механизм с большими моментами инерции рабочих органов большое значение имеет также характер нарастания ускорения после
окончания выбора люфта и последующего перехода к рабочему движению, поскольку от его интенсивности зависит последующий рывок в передаче (рывок определяется производной от ускорения по времени). Поэтому
плавность нарастания (спадания) ускорения (разгон и соответственно торможение) играют важную роль в пуско-тормозных режимах механизмов с большим моментом инерции.
Существующие способы пуска и останова электроприводов механизмов с больщим моментом инерции и люфтом в передаче не обеспечивают должной плавности нарастания (спадания) ускорения после окончания выбора зазора. Это приводит к завышенным значениям рывков в механизме после выбора зазора, что отрицательно сказывается на работе механизма в целом (например, к недопустимой раскачке ковша у одноковшового экскаватора).
Кроме того, завышение значения рывков отрицательно сказываются на состоянии людей (например, находящихся на поворотной платформе экскаватора).
Предлагаемый способ пуска и останова электропривода постоянного тока с люфтом в кинематической передаче позволит при высокой эффективности ограничения ударов ограничить рывки в механизме после окончания выбора зазора и при последующем переходе к полезному движению.
Для уменьшения ударов в передаче скорость двигателя во время выбора люфта должна нарастать (при разгопе) или спадать (при торможении) плавно, ускорение при этом должно выбираться из условий ограничения приращения кинетической энергии (за время выбора люфта) на безопасном уровне. В рабочем же режиме после выбора люфта ускорение должно быть максимально допустимым. Поэтому переход от режима выбора люфта (минимальное ускорение) к рабочему (максимально допустимое ускорение) должен производиться путем плавного нарастания ускорения во времени для того, чтобы рывок в передаче не превышал допустимой величины. Наилучший характер нарастания ускорения прямолинейный; при этом величина рывка постоянна.
С целью уменьшения ударов и рывков в кинематической передаче постепенное увеличение и уменьшение напряжения на якоре электродвигателя производят в параболической зависимости от времени.
Действительно, при параболическом характере кривой нарастание скорости при разгоне выбор люфта происходит на начальном участке параболы, практически не отличающемся от лрямой линии и на .котором укорение невелико и постоянно.
По мере окончания выбора зазора и перехода к рабочему режиму нарастание скорости происходит круче. Ускорение, следовательно, возрастает плавно по линейному закону, а рывок постоянен и ограничен допустимым значением.
При параболическом законе «арастания напряжения на якоре двигателя во времени t по этому же закону практически растет его скорость
V U,
где К - постоянная величина, определяемая
параметрами привода.
Ускорение а, как производная от скорости V по времени
а - 1U,
при этом растет во времени прямолинейно (т. е. плавно). Рывок же р, т. е. производная от ускорения а по времени
р 2К,
является постоянным и ограниченным.
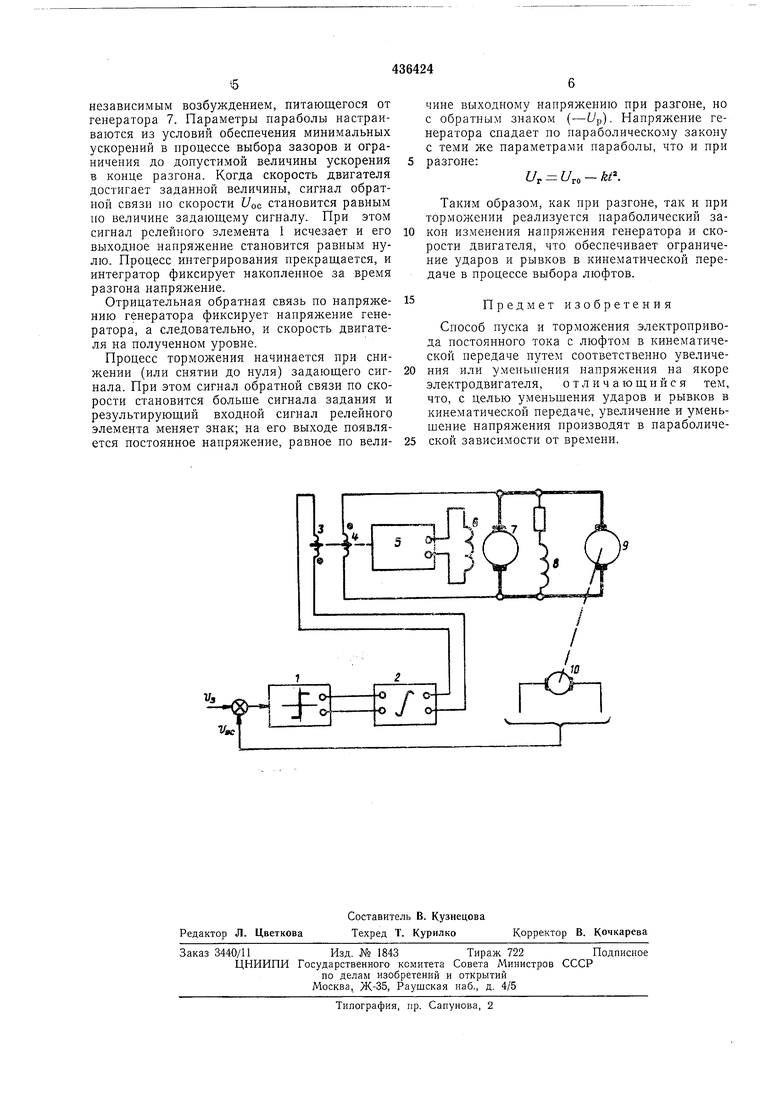
Па чертеже приведена схема одного из вариантов устройств, реализующего предложенный способ.
Схема содержит: релейный элемент 1, инте5 гратор 2, задающую обмотку управления возбудителя генератора 3, обмотку отрицательной обратной связи по напряжению генератора 4, возбудитель генератора 5, независимую обмотку возбуждения генератора 6, генератор 0 с критическим самовозбуждением 7, параллельную обмотку возбуждения генератора 8, приводной двигатель механизма 9, тахогенератор 10. Приняты следующие обозначения: Us - сигнал задания; L/oc - сигнал отрица5 тельной обратной связи по скорости.
Генератор 7 имеет две обмотки возбуждения: параллельную 8, включенную на якорь и имеющую параметры критического самовозбуждения, и независимую 6, включенную на 0 выход возбудителя 5.
Напряжение генератора с критическим самовозбуждением при питании независимой обмотки напряжением, постоянным по величине, нарастает по закону:
5Ur aU.f,
где Ur - текущее значение напряжения генератора;
Us - напряжение по обмотке независи0мого возбуждения;
а - коэффициент пропорциональности, определяемый параметрами генератора;
t - время; 5 а спадает по закону:
Uf -. t/r. -
Задающий сигнал f/з поступает на вход релейного элемента 1, выходное напряжение которого f/p постоянно и не зависит от величины задающего сигнала. Выходное напряжение релейного элемента определяется наличием или отсутствием сигнала на его входе. Постоянное выходное напряжение релейного
5 элемента поступает на вход интегратора 2.
Выходное напряжение интегратора t/и, изменяющееся по закону (при L/p const):
,
поступает на вход возбудителя генератора 5. Напряжение на независимый обмотке генератора при этом изменяется, согласно выражению
„-Pf/p-/,
где р - коэффициент усиления возбудителя.
Таким образом, напряжение генератора при разгоне изменяется по параболическому закону:
.Uy-i k-t
где k a.-Up.
По этому же параболическому закону из65 меняется и скорость двигателя поворота 9 с
независимым возбуждением, питающегося от генератора 7. Параметры параболы настраиваются из условий обеспечения минимальных ускорений в процессе выбора зазоров и ограничения до допустимой величины ускорения в конце разгона. Когда скорость двигателя достигает заданной величины, сигнал обратной связи 110 скорости /ос становится равным 110 величине задающему сигналу. При этом сигнал релейного элемента 1 исчезает и его выходное напряжение становится равным нулю. Процесс интегрирования прекращается, и интегратор фиксирует накопленное за время разгона напряжение.
Отрицательная обратная связь по напряжению генератора фиксирует напряжение генератора, а следовательно, и скорость двигателя на полученном уровне.
Процесс торможения начинается при снижении (или снятии до нуля) задающего сигнала. При этом сигнал обратной связи по скорости становится больше сигнала задания и результирующий входной сигнал релейного элемента меняет знак; на его выходе появляется постоянное напряжение, равное по величине выходному напряжению при разгоне, но с обратным знаком (-Ур). Напряжение генератора спадает по параболическому закону с теми же параметрами параболы, что и при разгоне:
f/r и,, - Ш
Таким образом, как при разгоне, так и при торможении реализуется параболический закон изменения напряжения генератора и скорости двигателя, что обеспечивает ограничение ударов и рывков в кинематической передаче в процессе выбора люфтов.
15
Предмет изобретения
Способ пуска и торможения электропривода постоянного тока с люфтом в кинематической передаче путем соответственно увеличения или уменьшения напряжения на якоре электродвигателя, отличающийся тем, что, с целью уменьшения ударов и рывков в кинематической передаче, увеличение и уменьшение напряжения производят в параболической зависимости от времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1966 |
|
SU215296A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1973 |
|
SU379961A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ РЕДУКТОРНОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2314633C1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Электропривод постоянного тока | 1990 |
|
SU1713070A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Способ управления приводом тягового органа | 1985 |
|
SU1289760A1 |
