Изобретение относится к механизмам дистанционного управления поворотными захватами, монтируемыми на каретках конвейера, предназначенного для сортировки лесоматериалов.
Известны механизмы дистанционного управления поворотными захватами, монтируемыми на каретках конвейера, включающие укрепляемые на несущей конструкции конвейера упоры и устанавливаемые на каретках конвейера двуплечие рычаги, удерживающие поворотные захваты в рабочем положении.
Предложенный механизм проще по конструкции. Свободное плечо каждого двуплечего рычага механизма соединено с кареткой при помощи пружинного элемента и выполнено с передвижным в поперечном направлении относительно продольной оси конвейера диском, взаимодействующим в период раскрытия захвата с укрепленным на несущей конструкции конвейера упором. На верхней несущей части конструкции конвейера смонтированы подпружиненные упоры.
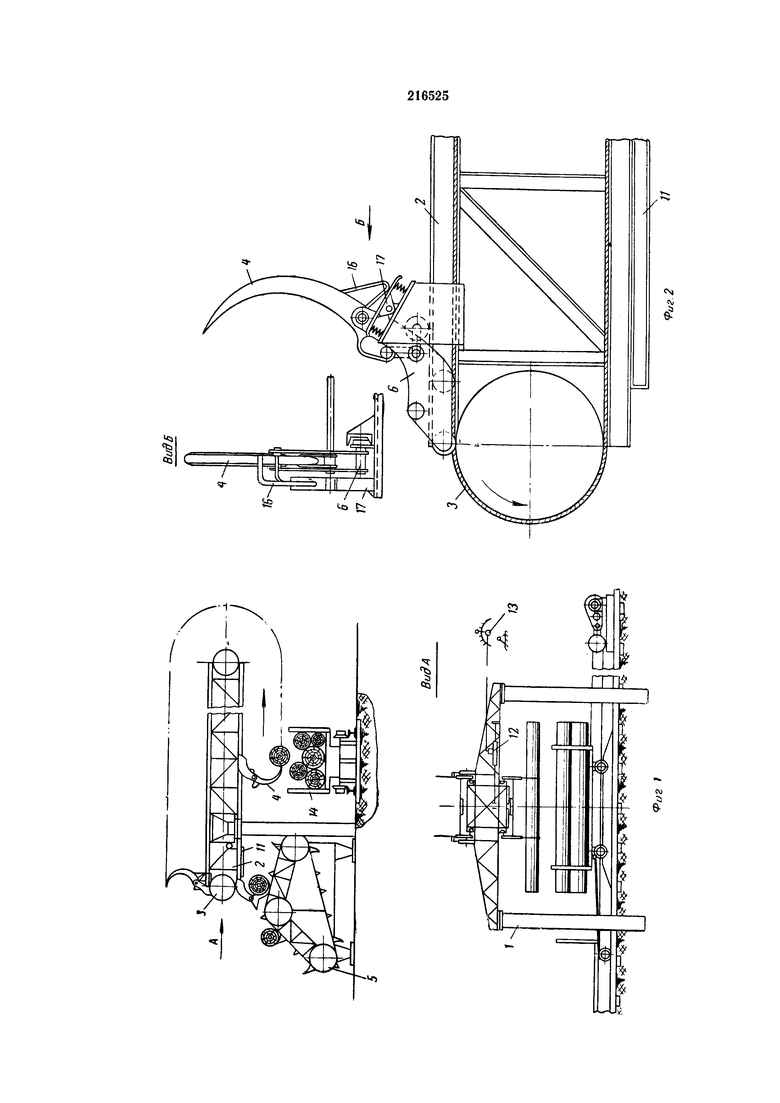
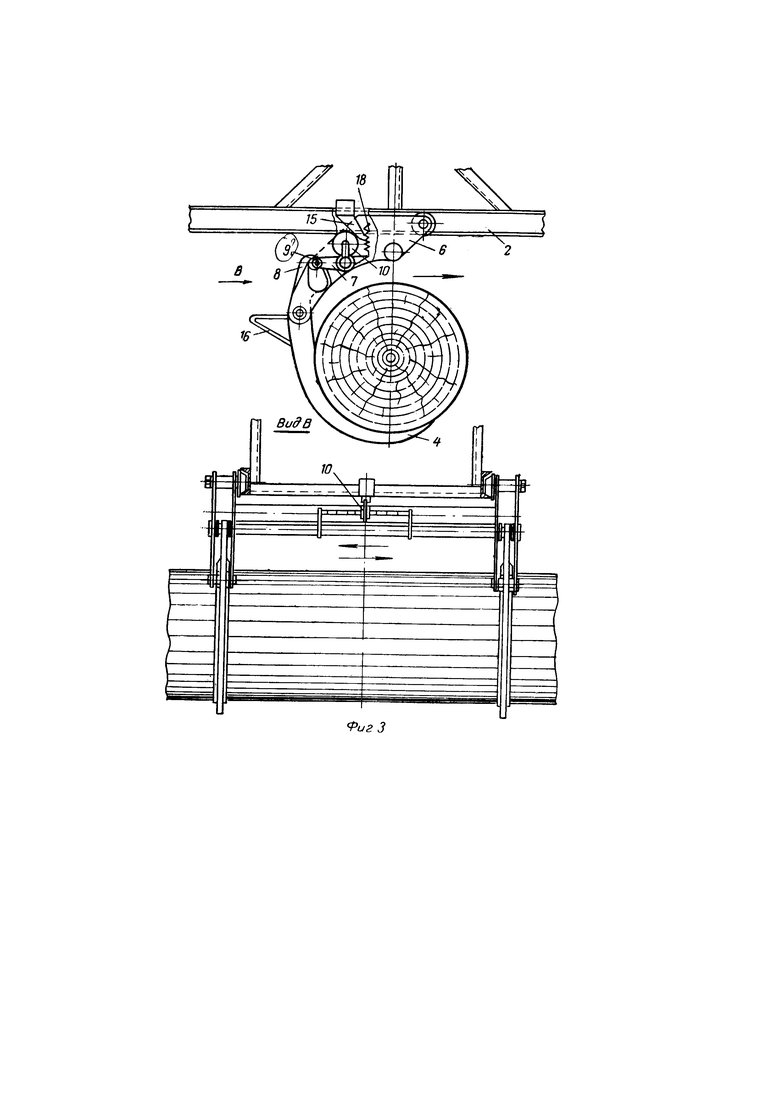
На фиг. 1 изображен механизм дистанционного управления поворотными захватами, монтируемыми на каретках конвейера, вид сбоку; на фиг. 2 - механизм принудительного закрывания поворотного захвата, вид сбоку; на фиг. 3 - механизм адресации и сброса, вид сбоку.
Механизм включает арочные опоры 1 с пролетом, согласованным с длиной пропускаемых лесных материалов. На опорах установлена ферма 2 с сортировочным конвейером 3, имеющим грузовые захваты 4. Лесоматериалы подаются на захваты с цепного ячейкового транспортера 5, имеющего одинаковую скорость движения с сортировочным конвейером 3. Захваты 4 поворотно смонтированы на каретках 6 и в рабочем положении удерживаются двуплечими рычагами 7. Одно плечо рычага 7 представляет собой П-образную рамку, в которую пропущен отросток захвата, выполненный в виде серьги 8.
Свободные концы П-образной рамки соединены роликом 9, проходящим через серьгу 8 и взаимодействующим с ней. На другом плече рычага 7 смонтирован адресный диск 10, который может перемещаться в поперечном направлении относительно продольной оси конвейера 3 и занимать одно из фиксированных положений. Каждое положение диска 10 предназначено для одного сорторазмера.
В месте разгрузки конвейера 3 установлен механизм заказа сорторазмера, состоящий из стрелочного перевода 11 и сервомеханизма 12. Стрелочный перевод 11 поворачивается сервомеханизмом 12, золотник которого соединен с рукояткой 13 управления механизмом заказа сорторазмера. Захваты открываются над соответствующим приемником 14 при помощи упоров 15, жестко укрепленных на несущей конструкции конвейера 3 и взаимодействующих с диском 10. Закрываются захваты на верхней беговой дорожке фермы 2 в результате взаимодействия отростков 16, захватов с подпружиненным упором 17, шарнирно закрепленным на ферме. Рычаг в исходное положение возвращается серьгой 8 и фиксируется пружиной 18. Приемники 14 предназначены для формирования пачек бревен.
Работает механизм следующим образом.
Сортируемые лесоматериалы подаются транспортером 5, по одному в каждой ячейке, с которого снимаются грузовыми захватами 4 конвейера 3. Захваты удерживаются в рабочем положении рычагами 7, одни концы которых взаимодействуют с серьгами 8, а другие несут адресные диски 10. Диск заходит в стрелочный перевод. Оператор, воздействуя на рукоятку 13, управляет стрелочным переводом, передвигая тем самым диск в одно из фиксированных положений. Каретка с грузом движется по нижней беговой дорожке фермы до упора 15. Диск, взаимодействуя с упором 15, поворачивает рычаг, раскрывая захваты. Освободившиеся от груза каретки с раскрытыми захватами, возвращаясь к месту загрузки по верхней беговой дорожке фермы, встречают упоры 17. Отростки 16 захватов взаимодействуют с упорами 17, и захваты с рычагами возвращаются в рабочее положение. В этом положении рычаги фиксируются пружиной 18.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки лесных материалов | 1960 |
|
SU133405A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ПОЧАТКОВ И НАДЕВАНИЯ ПАТРОНОВ НА ПРЯДИЛЬНЫХ И ИМ ПОДОБНЫХ МАШИНАХ | 1966 |
|
SU187574A1 |
| Траверса для навески лесных грейферов | 1971 |
|
SU785176A1 |
| Установка для раскряжевки лесоматериалов | 1976 |
|
SU616125A1 |
| МАЛОГАБАРИТНЫЙ ТРЕНАЖЕР | 1995 |
|
RU2095107C1 |
| НАВЕСНОЙ ОБОРОТНЫЙ ПЛУГ | 2005 |
|
RU2300180C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Захват-кантователь для изделий с центральным отверстием | 1983 |
|
SU1157004A1 |
| УСТРОЙСТВО для НАВЕШИВАНИЯ НОДВЕСКИ НА СЕРЬГУ КАРЕТКИ ПОДВЕСНОГО КОНВЕЙЕРА | 1970 |
|
SU267465A1 |
| Толкатель верхнего действия для вагонеток | 1984 |
|
SU1191413A1 |
1. Механизм дистанционного управления поворотными захватами, монтируемыми на каретках конвейера, включающий укрепляемые на несущей конструкции конвейера упоры и устанавливаемые на каретках конвейера двуплечие рычаги, удерживающие поворотные захваты в рабочем положении, отличающийся тем, что, с целью упрощения конструкции, свободное плечо каждого двуплечего рычага механизма соединено с кареткой при помощи пружинного элемента и выполнено с передвижным в поперечном направлении относительно продольной оси конвейера диском, взаимодействующим в период раскрытия захвата с укрепленным на несущей конструкции конвейера упором.
2. Механизм по п. 1, отличающийся тем, что, с целью обеспечения рабочего положения поворотному захвату и взаимодействующему с ним двуплечему рычагу, на верхней несущей части конструкции конвейера смонтированы подпружиненные упоры.
