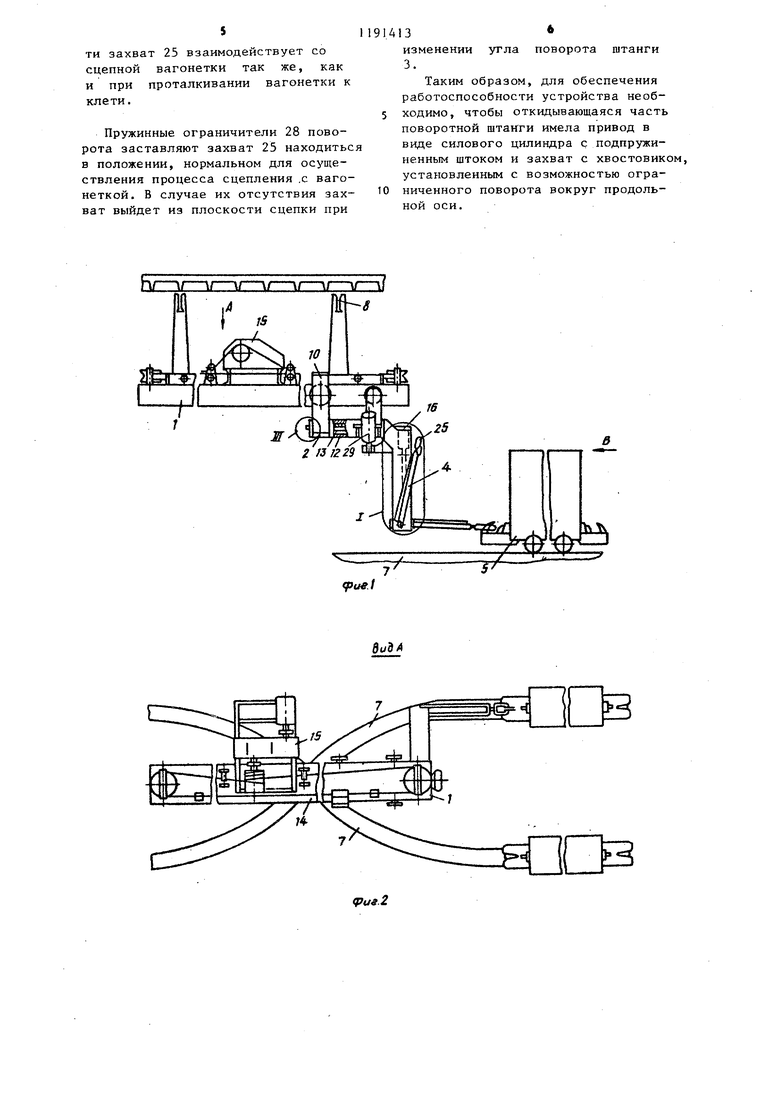
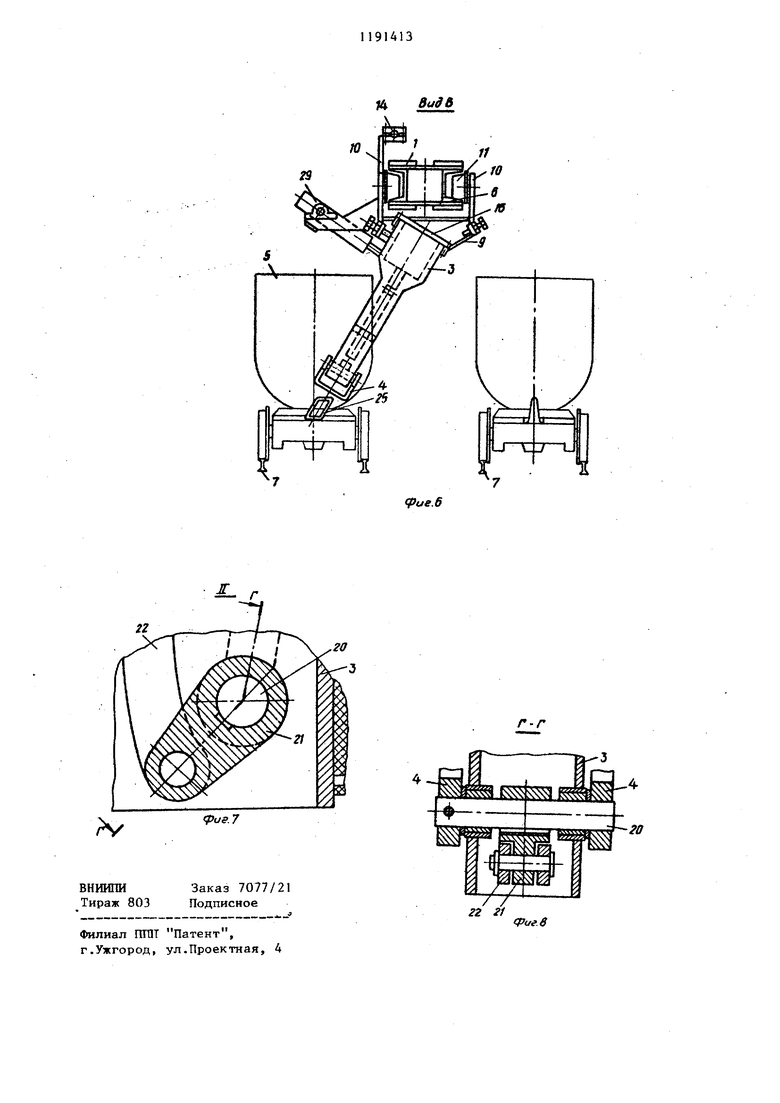
1 Изобретение относится к транспорту, а именно к горно-рудным подъемникам, в частности к толкателям верхнего действия, предназначенным для перемещения ва.гонеток по рельсовым путям для подачи их в шахтную клеть и вывода из клети. Цель изобретения - повьщ ение безопасности труда и повьщ1ения эффективности работы толкателя путем обеспечения сцепления складной штанги с вагонеткой на любом отрезке криволинейных участков рельсовых путей. На фиг. I изображен предлагаемый толкатель, вид сбоку; на фиг. 2 вид А на фиг. 1 (тонкими линиями показаны пересекающиеся рельсовые пути с установленными на них вагоне ками и повернутая штанга с откинуто в рабочее положение частью ); на фиг. 3 - узел 1 на фиг. 1 (увеличен ный фрагмент рабочего органа толка теля) ; на фиг. 4 - вид Б на фиг. 3 (увеличенный фрагмент складывающейс части щтанги с захватом); на фиг. 5 узел 1П на фиг. 1 (увеличенный фрагмент несущей части щтанги толка теля в месте ее соединения с кареткой ); на фиг. 6 - вид В на фиг. 1 (увеличенный масштаб повернутой штанги толкателя в сцепленном с ва гонеткой состоянии, когда вагонетк находится сбоку от направляющей бал ки) ; на фиг. 7 - узел Г1 на фиг. 3 на фиг, 8 - разрез Г-Г на фиг. 7. Толкатель содержит направляющую балку 1, на которой смонтирована каретка 2, несущая рабочий орган в виде складной штанги 3 с откидывающейся частью 4, которая служит в качестве удлинителя рабочего органа и необходима для контролируемого проталкивания вагонетки 5 внутрь клети и вывода ее оттуда. Направляющая балка выполнена из соединенных между собой щвеллер 6 и установлена вдоль продольной оси подземной выработки между рель совыми путями 7 на поперечных балках 8, прикрепленных к тюбингам тоннельной обделки. Каретка 2 состоит из основания 9 (фиг. 6), к которому посредством осей, установленных в кронштейнах 10, прикреплены катки 11. Основани 9 вьтолнено из листового проката с горизонтальным отверстием 12 (фиг. 32 и 5 ), расположенным вдоль путей 7 и над ними посредине для установки в нем оси 13 штанги 3. Один из кронштейнов 10 катка 11 выступает над направляющей балкой 1, где основание 9 каретки 2 прикрепляется к канату 14 привода 15 перемещения каретки. Несущая часть штанги 3 выполнена полой и внутри нее неподвижно закреплен силовой цилиндр 16. Конец штока 17 (фиг. 3) силового цилиндра 16 шарнирно присоединен к удлинителю 18, подвижно установленному в направляющей втулке 19, размещенной внутри несущей части штанги 3. Свободный конец удлинителя 18 шарнирно связан с откидывающейся частью 4 штанги 3. Для этого (фиг.З и 7 ) откидывающаяся часть 4 штанги выполнена в виде двуплечего рычага, закрепленного на несущей части щтанги посредством оси 20. Короткое плечо 21 двуплечего рычага соединено со свободным концом удлинителя посредством серьги 22. На конце удлинителя 18 навернута гайка 23, служащая в качестве упора для пружины 24, размещенной между гайкой и направляющей втулкой 19. Таким образом щток 17 силового цилиндра 16, а следовательно, и откидывающаяся часть 4 штанги 3 становятся подпружиненными по отношению к несущей части рабочего органа. Это необходимо для обеспечения приподнятого положения конца откидывающейся части штанги над сцепным устройством вагонетки 5 при подведении с поворотом штанги к вагонетке и при отключенном пневмоцилиндре 16 (в противном случае не произойдет зацепления с вагонеткой ). На свободном конце откидывающейся части 4 рабочего органа закреплен захват 25 (фиг. 3 и 4), имеющий цилиндрический хвостовик 26, установленный с возможностью осевого вращения во втулке 27. Вращение захвата 25 необходимо для установки его в горизонтальной плоскости в рабочем / сцепленном положении рабочего органа с вагонеткой при изменении угла поворота штанги на криволинейных участках пути. Для обеспечения определенного угла поворота захвата ( иначе захват может не попасть на сцепку вагонетки) на свободном конце откидьшающейся части штанги закреплены ограничители 28 поворота, выполненные в виде плоских пружин, свободно контактирующихся с захватом 25. Для обеспечения фиксированного поворота штанги 3 в плоскости, поперечной относительно направляющей балки 1, она соединена с кареткой 2 посредством пневмоцилиндра 29 (фиг. 6 ). В качестве привода складывания и раскладывания штанги 3 может служить не только пневмоцилиндр, но и гидроцилиндр. Единственным условием для этого привода является то, что он должен обеспечить постоянный контакт с поджатием к низу откидывающейся части штанги со сцепленным устройством вагонетки 5 при обязательном изменении высотного положения с цепного конца штанги на криволинейных участках пути. Это условие могут обеспечить только пневмо- или гидроцилиндры, имеющие возможность изменения длины под нагрузкой, воспринимаемой ими при повороте штанги в процессе перемещени складной штанги с вагонеткой на кри волинейных участках пути (например, на стрелочном переводе ). Толкатель работает следующим образом. В исходное положение рабочий орган толкателя устанавливается между двумя крайними вагонетками 5,Наход щимися в составе на путях 7. . Для этого штанга 3 в сложенном состоянии устанавливается путем перемещения каретки 2 по направляющей балке 1 напротив промежутка между вагонет ками 5 и заводится в этот промежуто путем поворота ее в поперечной плос кости с помощью пневмоцилиндра 29. После этого включается привод 15 перемещения каретки, в результате чего откидывающаяся часть 4 складно штанги соприкасается с задним борто крайней вагонетки, и вагонетка проталкивается вперед на некоторое рас стояние. Для сцепления рабочего органа с вагонеткой каретка 2 отводится наза и включается силовой цилиндр 16 пут подачи воздуха в штоковую полость этого цилиндра, в результате чего шток 17 втягивается и через удлинитель 18 и серьгу 22 воздействует на короткое плечо 21 откндьшающейся части 4 штанги 3, поворачивая ее вокруг оси 20 в крайнее нижнее положение на уровне сцепного устройства вагонетки 5 и сзади него и сжимая при этом пружину 24. Затем силовой цилиндр 16 выключается в результате чего откидьгоающаяся часть 4 под воздействием пружины 24 приподнимается вьщ1е уровня сцепного устройства вагонетки 5. После этого захват 25 устанавливается над сцепным устройством вагонетки путем перемещения каретки 2 со штангой 3 вперед и поворота штанги в поперечной плоскости на необходимый угол с помощью пневмоцилиндра 29.. Сцепку рабочего органа с вагонеткой 5 осуществляют путем опускания захвата 25 штанги на крюк сцепного . устройства вагонетки. Для этого вновь включают силовой цилиндр 16 путем подачи сжатого воздуха в его штоковую полость, в результате чего откидывающаяся часть 4 поворотной штанги 3 поворачивается вокруг оси 20 в крайнее нижнее положение. В сцепленном положении вагонетка 5 проталкивается в клеть. При таком движении вагонетки на криволинейных участках пути захват 25 поворотной штанги 3 должен находиться в неизменном положении по отношению к сцепному устройству вагонетки ( а именно, к крюку), в то время как штанга 3 постоянно меняет угол поворота, стремясь изменить положение захвата по высоте и повернуть его вокруг оси, проходящей через хвостовик 26. Неизменное положение захвата 25 по отношению к сцепному устройству вагонетки 5 обеспечивается силовым цилиндром 16, постоянно поджимающим захватом 25 к сцепке при изменении высотного положения этого захвата, и установкой хвостовика 26 захвата на откидывающейся части 4 штанги с возможностью вращения вокруг оси хвостовика. После заталкивания вагонетки в клеть рабочий орган толкателя расцепляется с вагонеткой и осуществляется обмен вагонеток. Для вывода вагонетки из клети на любом из путей рабочий орган вводится в зацепление с вагонеткой с помощью силового цилиндра 16 и отводится к порожнему составу. При этом на криволинейных участках пу5
ти захват 25 взаимодействует со сцепной вагонетки так же, как и при проталкивании вагонетки к клети.
Пружинные ограничители 28 поворота заставляют захват 25 находитьс в положении, нормальном для осуществления процесса сцепления .с вагонеткой. В случае их отсутствия захват выйдет из плоскости сцепки при
13
изменении утла поворота штанги 3.
Таким образом, для обеспечения работоспособности устройства необходимо, чтобы откидывающаяся часть поворотной штанги имела привод в виде силового цилиндра с подпружиненным штоком и захват с хвостовико установленным с возможностью ограниченного поворота вокруг продольной оси.

| название | год | авторы | номер документа |
|---|---|---|---|
| Толкатель верхнего действия для вагонеток | 1984 |
|
SU1201213A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛЯ ПОЛУНАВЕСНОГО АГРЕГАТА И ПОЛУНАВЕСНОЙ АГРЕГАТ, ТАКОЙ КАК ПЛУГ, ОБОРУДОВАННЫЙ ТАКИМ УСТРОЙСТВОМ РЕГУЛИРОВАНИЯ | 2003 |
|
RU2321977C2 |
| Автоматическая сценка | 1931 |
|
SU31038A1 |
| АВТОСЦЕПКА | 2021 |
|
RU2762592C1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Установка для натяжения арматурных стержней | 1986 |
|
SU1406324A1 |
| Устройство для перемещения шахтных вагонеток | 1979 |
|
SU861271A1 |
| Автоматическая сцепка для подвижного состава железных дорог | 1934 |
|
SU53103A1 |
| АВТОМАТИЧЕСКАЯ СЦЕПКА ДЛЯ ПРИСОЕДИНЕНИЯ ПРИЦЕПОВ К ПОЛЕВОЙ УБОРОЧНОЙ МАШИНЕ | 1991 |
|
RU2010477C1 |

1. ТОЛКАТЕЛЬ ВЕРХНЕГО ДЕЙСТВИЯ ДПЯ ВАГОНЕТОК, включающий направляющую балку, установленную на балке каретку с рабочим органом в виде складной штанги, соединенной одним концом с осью каретки с возможностью поворота в поперечной плоскости относительно направляющей балки, отличающийся тем, что, с целью повышения безопасности труда и повышения эффективности работы толкателя путем обеспечения сцепления складной штанги с вагонеткой на любом отрезке криволинейных участков рельсовых путей, рабочий орган снабжен приводом складывания штанги в виде силового цилиндра с подпружиненным штоком, кинематически связанным с одним концом откидьшающейся частью штанги, снабженной захватом и хвостовиком, установленными на другом конце откидывающей(Л ся части штанги с возможностью с ограниченного поворота относительно ее продольной оси. 2. Толкатель по п. 1, отличающийся тем, что ограничитель поворота захвата с хвостовиком выполнен в виде подпружиненсо S ных упоров, закрепленных на откидывающейся части штанги. S
сриг.5
23
1f Вид б
| ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 0 |
|
SU315681A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Каталог машин, механизмов, оборудования средств автоматизации и малой механизации, выпускаемых предприятиями Министерства транспортного строительства | |||
| Под ред | |||
| М.С | |||
| Гольдмана, Оргтрансстрой, М., 1975, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU274A1 |
