Известные устройства для дистанционного управления кранами, состояп;ие из передатчика с пультом управления, содержащим генераторы задающих частот и формирователи команд управления, и приемника команд управления с дискриминатором, не обеспечивают надежного управления и точной автоматической настройки приемника команд на несущую частоту передатчика.
В предлагаемом устройстве к выходу каждого из генераторов с двумя поддиапазонами частоты подключен формирователь команд с числом положений, равным числу ступеней магнитного контроллера крана, а приемник устройства снабжен подсоединенным к выходу дискриминатора узлом корректирования частоты передатчика, выполненным в виде реверсивного усилителя с релейным выходом, управляющим корректирующим элекгродвигателем, ротор которого механически связан с роторами диапазонного ограничителя и емкостного блока подстройки частоты.
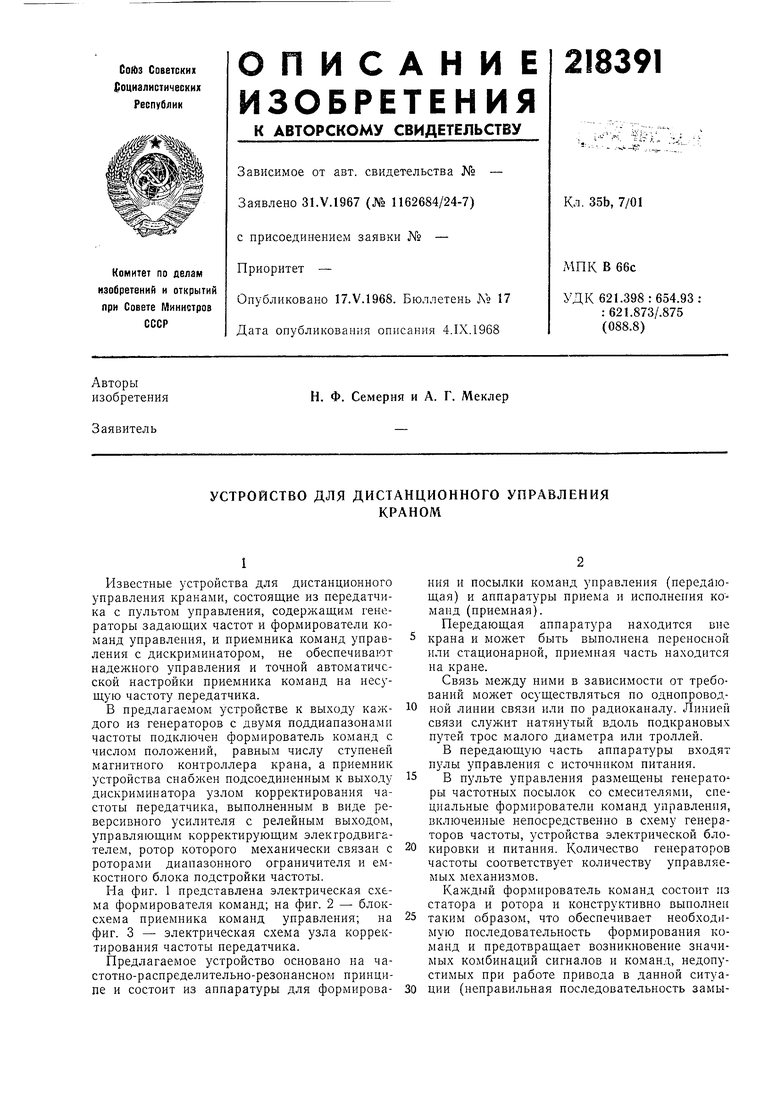
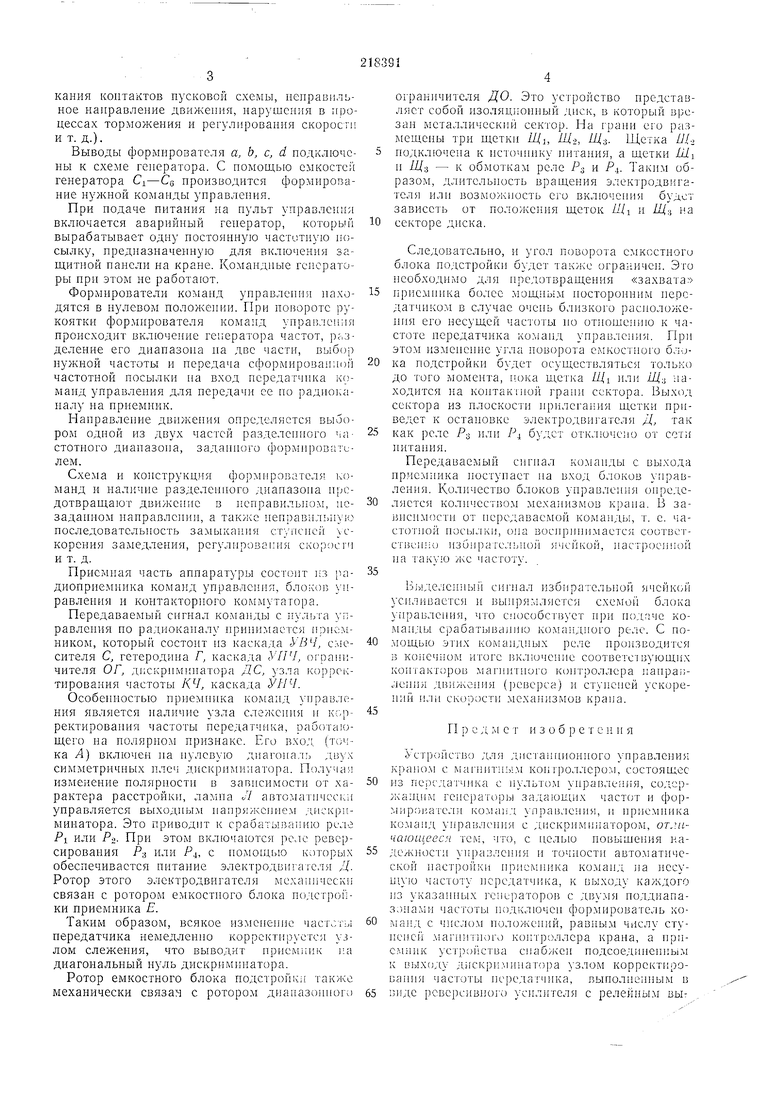
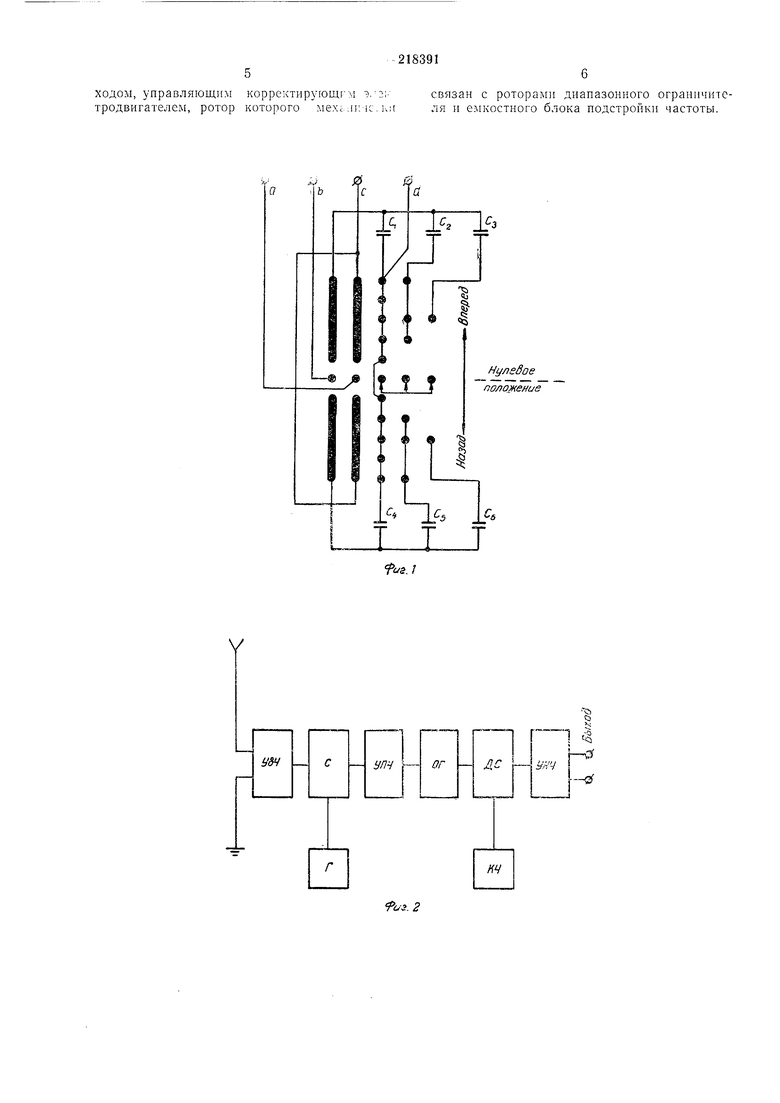
На фиг. 1 представлена электрическая схема формирователя команд; на фиг. 2 - блоксхема приемника команд управления; на фиг. 3 - электрическая схема узла корректирования частоты передатчика.
ния и посылки команд управления (передающая) и аппаратуры приема и исполнения ко манд (приемная).
Передающая аппаратура находится вне крана и быть выполнена переносной или стационарной, приемная часть находится на кране.
Связь между ними в зависимости от требований молсет осуществляться по однопроводной линии связи или по радиоканалу. Линией связи служит натянутый вдоль подкрановых путей трос малого диаметра или троллей.
В передающую часть аппаратуры входят пулы управления с источником питания.
В пульте управления размещены генераторы частотных посылок со смесителями, специальные формирователи команд управления, включенные непосредственно в схему генераторов частоты, устройства электрической блокировки и питания. Количество генераторов частоты соответствует количеству управляемых механизмов.
Kaжд.ш формирователь команд состоит из статора и ротора и конструктивно выполнен таким образом, что обеспечивает необходимую последовательность формирования команд и предотвращает возникновение значимых комбинаций сигналов и команд, недопустимых при работе привода в данной ситуации (неправильная последовательность замыкания контактов пусковой схемы, неправильное направление движения, нарушенпя в процессах торможения и регулнрованпя скоросгп и т. д.).
Выводы формнрователя а, Ь, с, d подключены к схеме генератора. С помощью емкостей генератора Cj-Cg нронзводнтся формнрование нужной команды управлення.
При подаче пптания на пульт управления включается аварнйпый генератор, который вырабатывает одну постоянную частотную посылку, предназначенную для включения защитной папелн на кране. Командные генераторы при этом не работают.
Формирователи команд управлепия находятся в нулевом ноложепии. Прп повороте рукоятки формнрователя команд унраилеиия пронеходит включение генератора частот, р;.зделение его диапазопа на две части, выбор нужной частоты п передача сформированной частотной посылки па вход передатчпка команд управления для передачи ее по радио ;апалу па приемник.
Направлеппе двпжепия опре;,елястся выбором одпой из двух частей разделеипого частотпого диапазопа, задаииого формпроватилем.
Схема п конетрукния формирователя, команд и наличие разделениого диапазоиа иредотвращают движение в неправильпом, иезаданном направлении, а также ненравпльну о последовательноеть замыкания ступсис скорения замедления, регулирования скоросгп и т. д.
Приемная чаеть аппаратуры состоит нз радиоприемиика команд управле1 ия, блоков управления и контакторного коммутатора.
Передаваемый еигнал команды с пульта управления по радиокаиалу прпнимастся приемником, который состоит из каскада , смесителя С, гетеродина Г, каскада , orpainiчителя ОГ, дискрпмипатора ДС, узла корректирования частоты КЧ, каскада УНЧ.
Особепиостью прпемппка комапд управления является наличие узла сле кеппя п корректироваиия чаетоты передатчика, работающего па полярном признаке. Его вхо;. (точка А) включен иа нулевую дпагоиаль двух симметричных плеч дискриминатора. Получая изменеппе полярноети в зависимости от характера расстройки, лампа Л автоматически управляется выходным папряжеппем /u-icKpitминатора. Это приводит к срабатыванию реле PI или Р-2. Прп этом включаются реле реверсирования P-i или Р, с помон11)Ю которых обеспечивается питание электродвигателя Д. Ротор этого электродвигателя мехап11ческ связан с ротором емкостпого блока подстро ь ки приемника Е.
Таким образом, всякое измеиепие частоты передатчика немедленно корректируется узлом слежения, что выводит прием};ик иа диагональный нуль дискриминатора.
ограннчителя ДО. Это устройство представляет собой нзоляционпый диск, в который врезай металличеекпй сектор. На грани его размещены трн щетки Я/, Ш,-, Щ:. Щетка ///-j иодключепа к псточппку пптання, а щетки /i/j и Я(з - к обмоткам реле /-з и P.J. Таким образом, длптельиоеть вращения электродвигателя или возможность его включеиия будет зависеть от иоложепия щеток ///i и Щ:, на еекторе диека.
Следовательио, п угол поворота емкоетиого блока подетройки также ограничен. Это пеобходнмо для предотвращения «захвата
нриемника более мощным иостороииим передатчиком в елучае очень блпзкого расположения его нееущей частоты по отпошеппю к чаетоте передатчика команд управлеппя. Прп этом нзменеппе угла поворота емкостпого блока подстройки будет осуществляться до того момеита, нжа щетка Щ или Щ-. находитея на коитактиой грапп сектора. Выход сектора из плоскости ирилега ия щетки ириведет к оетаповке элект юдвпгателя Д, так
как реле Р-, плп Р будет отключено от сети литания.
Передаваемый сигиал ко.маиды с выхода прие: П1Ика поступает па вход блоков управлепия. Количеетво блоков управлеиия оиределяется количеетво.м мехапизмов краиа. В завиеи-мости от передаваемой , т. е. частотаой иосы.чкп, она восир1П1нмается соотвстCTBciuio избираге.лыюй ячейкой, иаст)к)е1пк)й па такую же частоту.
Выделеиньп сигнал избирательной ячейкс й ус1 ливается и выпрямляется схемой блока управлеиия, что смособств ст ири иодпче команды срабатывалшо командного реле. С по.мощью этих командных реле нроизводптся в конечном итоге включение соответствующих контакторов Л1агнитпого контроллера iiaiipai;лепия движеппя ()) и етуиеией ускорепий или екорости .мехапизмов крапа.
П р е д дМ е т и з о б р е т е и и я
Устрсйктво для дпетаищюииого управления кг)а110Л1 с л агнитпы,м контроллером, состоящее
из пег)сдатч1п-;а с иультом уирав-теипя, ео;;ержап1,им геиераторы задаюицкк частот и форммргл.ате.тч кол1аид управления, и приемиика комаид управлеиия е диекримпнатором, отличающееся тем, что, с пелью иовышения надежности упразлсиия и точности автоматической паст)ойки приемиика комапд па несуную частоту передатчика, к выходу каждого J43 указаппых гепираторов с двумя иоддиапазопамп частоты иодключеи формирователь ; оманд е числом положений, равны.м числу етуиеией л .агпптиого контроллера краиа, а прпе.мник ycTpoiiCTBa снабжен подсоедииеииым к вых{1ду дискриминатора узлом корректирования чаетоты передатчпка, выполпепиым в
У8Ч
(и 5
1
р-п
ЛС
УНЧ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от утечки тока в контактной сети электровозной откатки | 1977 |
|
SU731511A1 |
| УСТРОЙСТВО для ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИВСЕСОЮЗНАЯПА1ЕНТНО-ТЕХ1{51'^[ШЙ1|БИБЛИОТЕКА | 1971 |
|
SU317093A1 |
| Устройство резервирования каналов тональной частоты | 1974 |
|
SU543170A1 |
| КАНАЛЬНОЕ КОДИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ | 1973 |
|
SU365854A1 |
| Аппаратура для автоматического контроля абонентских участков | 1978 |
|
SU769754A2 |
| СИСТЕМА СВЯЗИ НАЗЕМНОГО ПУНКТА УПРАВЛЕНИЯ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2024 |
|
RU2825035C1 |
| Система для передачи и приема информации | 1981 |
|
SU1053128A1 |
| Система целераспределения подвижных объектов | 2018 |
|
RU2686455C1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ | 1971 |
|
SU421023A1 |
| Устройство импульсного регулирования фазового положения ротора синхронного двигателя | 1973 |
|
SU472434A1 |
I
