Предлагаемое изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на подвижных объектах.
Известна «Бортовая радиолокационная станция для самолетной системы управления вооружением» [RU 2188436 опубл. 27.08.2002 г. МПК G01S 13/00], содержащая фазированную антенную решетку, антенно-волноводную систему, антенно-волноводный переключатель, приемник, передатчик, причем фазированная антенная решетка взаимосвязана с антенно-волноводной системой, которая в свою очередь взаимосвязана с антенно-волноводным переключателем. Кроме того, она содержит блок управления лучом ФАР, устройство ввода-вывода, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность, вычислитель скорости, дальности, пространственных углов цели режима воздух-воздух, вычислитель скорости, дальности, пространственных углов цели режима воздух-поверхность, вычислитель задачи боевого применения, формирователь сигналов для подвесок исполнительных элементов режима воздух-воздух, формирователь сигналов для подвесок исполнительных элементов режима воздух-поверхность.
Передатчик и приемник выполнены с возможностью функционирования как в режиме воздух-воздух, так и в режиме воздух-поверхность, а фазированная антенная решетка выполнена с гидроприводом. Первый выход приемника соединен с первым входом устройства ввода-вывода, первый выход устройства ввода-вывода подключен к первому входу вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, выход вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность соединен с первым входом вычислителя задачи боевого применения, первый выход вычислителя задачи боевого применения подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-поверхность, выход которого является первым выходом бортовой радиолокационной станции для самолетной системы управления вооружением. Второй выход приемника подключен к первому входу блока управления лучом ФАР, первый выход блока управления лучом ФАР соединен с управляющим входом ФАР с гидроприводом, второй выход блока управления лучом ФАР соединен с третьим входом вычислителя скорости, дальности, пространственных углов цели режима воздух поверхность, второй вход блока управления лучом ФАР подключен к первому выходу блока управления режимами работы и синхронизации. Второй выход блока управления режимами работы и синхронизации соединен со вторым входом вычислителя скорости, дальности и пространственных углов цели режима воздух-поверхность, третий выход блока управления режимами работы и синхронизации подключен к первому входу антенно-волноводного переключателя, четвертый выход блока управления режимами работы и синхронизации соединен шиной с входом коммутатора режима воздух-воздух, воздух-поверхность. Первый выход коммутатора режима воздух-воздух, воздух-поверхность подключен к третьему входу приемника, второй выход антенно-волноводного переключателя подключен к второму входу приемника, четвертый выход приемника соединен со вторым входом устройства ввода-вывода. Второй выход устройства ввода-вывода подключен к первому входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, пятый выход приемника соединен с третьим входом блока управления лучом ФАР, выход вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух соединен со вторым входом вычислителя задачи боевого применения. Второй выход вычислителя задачи боевого применения подключен к входу формирователя сигналов для подвесок исполнительных элементов режима воздух-воздух, выход которого является вторым выходом бортовой радиолокационной станции для самолетной системы управления вооружением. Пятый выход блока управления режимами работы и синхронизации подключен ко второму входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух, третий выход блока управления лучом ФАР подключен к третьему входу вычислителя скорости, дальности, пространственных углов цели режима воздух-воздух. Второй выход коммутатора режима воздух-воздух, воздух-поверхность подключен к четвертому входу приемника, третий выход коммутатора режима воздух-воздух, воздух-поверхность соединен с первым входом передатчика. Первый выход передатчика подключен ко второму входу антенно-волноводного переключателя, четвертый выход коммутатора режима воздух-воздух, воздух-поверхность соединен со вторым входом передатчика, второй выход передатчика подключен к третьему входу антенно-волноводного переключателя. Первый выход антенно-волноводного переключателя соединен с первым входом приемника, третий выход приемника подключен к первому входу блока управления режимами работы и синхронизации, а шестой выход приемника соединен со вторым входом блока управления режимами работы и синхронизации.
Недостатками такой бортовой радиолокационной станции для самолетной системы управления вооружением является невозможность решения целевых задач и получения координатной информации для задач траекторного взаимодействия при групповых действиях самолетов.
Наиболее близкой по технической сущности к предлагаемому изобретению является «Система передачи радиолокационного целеуказания для группы подвижных объектов» [RU 58730 U1 опубл. 27.11.2006 г., МПК G01S 13/00], которая содержит фазированную антенную решетку (ФАР), выполненную с гидроприводом, антенно-волноводную систему, антенно-волноводный переключатель, приемник, передатчик, функционирующие как в режиме воздух-воздух, так и в режиме воздух-поверхность. Фазированная антенная решетка взаимосвязана с антенно-волноводной системой, которая в свою очередь взаимосвязана с антенно-волноводным переключателем, блок управления лучом ФАР, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность, первый и четвертый выходы приемника являются первыми и вторым выходами системы передачи радиолокационного целеуказания для группы подвижных объектов. Второй и пятый выходы блока управления режимами работы и синхронизации являются третьим и четвертым выходами системы передачи радиолокационного целеуказания для группы подвижных объектов. Второй выход приемника подключен к первому входу блока управления лучом ФАР, выход блока управления лучом ФАР соединен с управляющим входом ФАР с гидроприводом. Второй вход блока управления лучом ФАР подключен к первому выходу блока управления режимами работы и синхронизации, третий выход блока управления режимами работы и синхронизации подключен к первому входу антенно-волноводного переключателя. Четвертый выход блока управления режимами работы и синхронизации соединен шиной с входом коммутатора режима воздух-воздух, воздух-поверхность. Первый выход коммутатора режима воздух-воздух, воздух-поверхность подключен к третьему входу приемника, второй выход антенно-волноводного переключателя подключен к второму входу приемника, пятый выход приемника соединен с третьим входом блока управления лучом ФАР, второй выход коммутатора режима воздух-воздух, воздух-поверхность подключен к четвертому входу приемника, третий выход коммутатора режима воздух-воздух воздух-поверхность подключен к первому входу передатчика. Четвертый выход коммутатора воздух-воздух воздух-поверхность соединен со вторым входом передатчика, первый выход передатчика подключен ко второму входу антенно-волноводного переключателя, второй выход передатчика подключен к третьему входу антенно-волноводного переключателя. Первый выход антенно-волноводного переключателя соединен с первым входом приемника. Третий выход приемника подключен к первому входу блока управления режимами работы и синхронизации, а шестой выход приемника соединен со вторым входом блока управления режимами работы и синхронизации. Выход устройства навигации соединен с первым входом устройства передачи информации, выход устройства передачи информации соединен с первым входом кодирующего устройства. Выход кодирующего устройства подключен к антенному устройству. Выход пульта управления соединен с входом устройства задания ранга, выход устройства задания ранга подключен ко второму входу кодирующего устройства, а второй и пятый выходы приемника соединены соответственно со вторым и третьим входами устройства передачи информации.
Недостатками известных устройств является значительное время оценки тактической обстановки наличия АСП на всех самолетах группы. При целераспределении значительного числа целей, например больше 10, временные затраты для набора необходимой информации на пульте управления групповыми действиями занимает значительное время неприемлемое при организации управления группой самолетов.
Технической задачей предлагаемой системы целераспределения подвижных объектов является достижение возможности решения целевых задач и получения координатной информации для задач траекторного взаимодействия при групповых действиях самолетов.
Сущность предлагаемой системы целераспределения подвижных объектов заключается в том, что она содержит фазированную антенную решетку (ФАР), выполненную с гидроприводом, антенно-волноводную систему, антенно-волноводный переключатель, приемник и передатчик, функционирующие как в режиме воздух-воздух, так и в режиме воздух-поверхность. Фазированная антенная решетка взаимосвязана с антенно-волноводной системой, которая в свою очередь взаимосвязана с антенно-волноводным переключателем. Кроме того, в нее входит блок управления лучом ФАР, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность. Первый и четвертый выходы приемника являются первыми и вторым выходами системы целераспределения подвижных объектов, а второй и пятый выходы блока управления режимами работы и синхронизации являются третьим и четвертым выходами системы целераспределения подвижных объектов. Второй выход приемника подключен к первому входу блока управления лучом ФАР, а выход блока управления лучом ФАР соединен с управляющим входом ФАР с гидроприводом. Второй вход блока управления лучом ФАР подключен к первому выходу блока управления режимами работы и синхронизации. Третий выход блока управления режимами работы и синхронизации подключен к первому входу антенно-волноводного переключателя, четвертый выход блока управления режимами работы и синхронизации соединен шиной с входом коммутатора режима воздух-воздух, воздух-поверхность, первый выход коммутатора режима воздух-воздух, воздух-поверхность подключен к третьему входу приемник. Второй выход антенно-волноводного переключателя подключен к второму входу приемника, пятый выход приемника соединен с третьим входом блока управления лучом ФАР. Второй выход коммутатора режима воздух-воздух, воздух-поверхность подключен к четвертому входу приемника, третий выход коммутатора режима воздух-воздух воздух-поверхность подключен к первому входу передатчика, четвертый выход коммутатора воздух-воздух воздух-поверхность соединен со вторым входом передатчика. Первый выход передатчика подключен ко второму входу антенно-волноводного переключателя, второй выход передатчика подключен к третьему входу антенно-волноводного переключателя, первый выход антенно-волноводного переключателя соединен с первым входом приемника. Третий выход приемника подключен к первому входу блока управления режимами работы и синхронизации, а шестой выход приемника соединен со вторым входом блока управления режимами работы и синхронизации. Первый выход устройства навигации соединен с первым входом устройства передачи информации, выход устройства передачи информации соединен с первым входом кодирующего устройства, выход кодирующего устройства подключен к первому входу антенного устройства. Первый выход пульта управления групповыми действиями соединен с входом устройства задания ранга, выход устройства задания ранга подключен ко второму входу кодирующего устройства. Второй и пятый выходы приемника соединены соответственно со вторым и третьим входами устройства передачи информации.
Новыми признаками, обеспечивающими достижение заявленного технического результата является введение устройство ввода-вывода, декодирующего устройства авиационных средств поражения, декодирующего устройства навигационных параметров, вычислителя, запоминающего устройства траекторий авиационных средств поражения и обзорного индикатора. Первый выход антенного устройства соединен с входом устройства ввода-вывода, первый выход которого соединен с входом декодирующего устройства авиационных средств поражения, второй выход устройства ввода-вывода подключен к входу декодирующего устройства навигационных параметров, выходы декодирующего устройства авиационных средств поражения и декодирующего устройства навигационных параметров соответственно соединены с первым и вторым входами вычислителя. Первый выход вычислителя соединен с входом обзорного индикатора. Второй выход приемника подключен к третьему входу вычислителя, пятый выход приемника соединен с четвертым входом вычислителя, к пятому входу которого подключен второй выход устройства навигации. Шестой вход вычислителя соединен с выходом запоминающего устройства авиационных средств поражения, а седьмой вход вычислителя подключен ко второму выходу антенного устройства. Ко второму входу антенного устройства подключен второй выход вычислителя, восьмой вход которого соединен со вторым выходом пульта управления групповыми действиями.
На фиг. 1 приведена блок-схема системы целераспределения подвижных объектов.
На фиг. 2 приведена блок-схема приемника.
На фиг. 3 приведена блок схема БУЛ ФАР.
На фиг. 4 приведена блок-схема блока управления режимами работы и синхронизации.
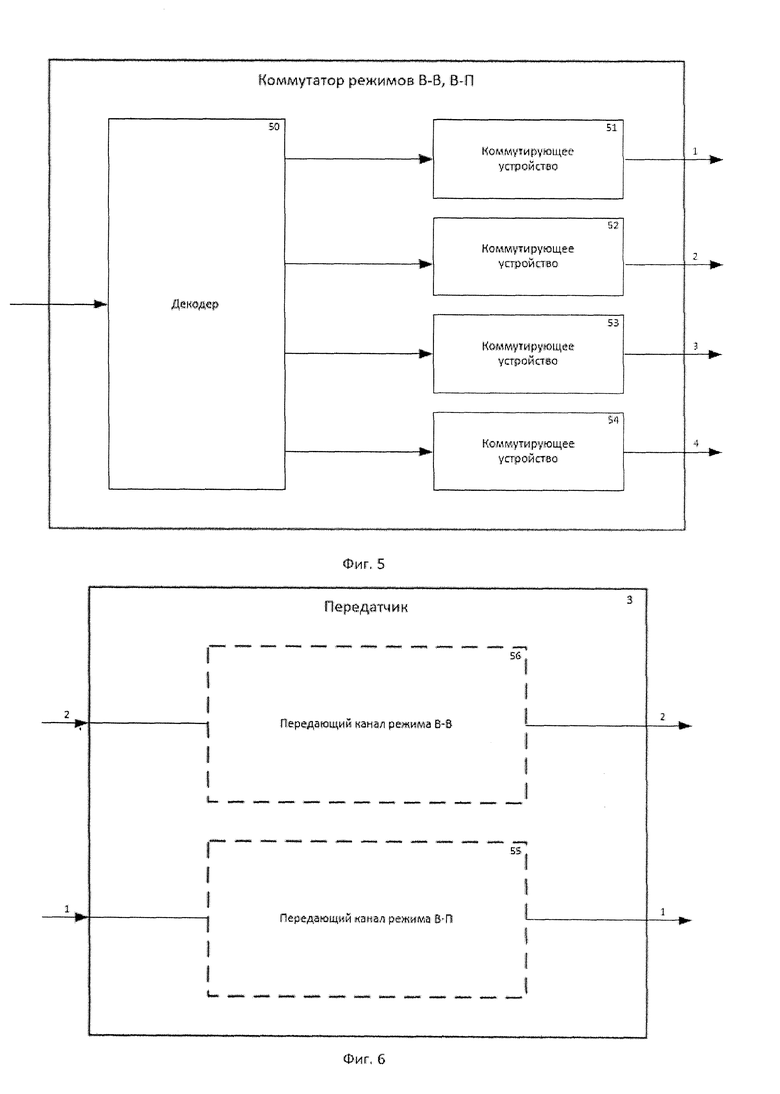
На фиг. 5 приведена блок-схема режимов В-В, В-П.
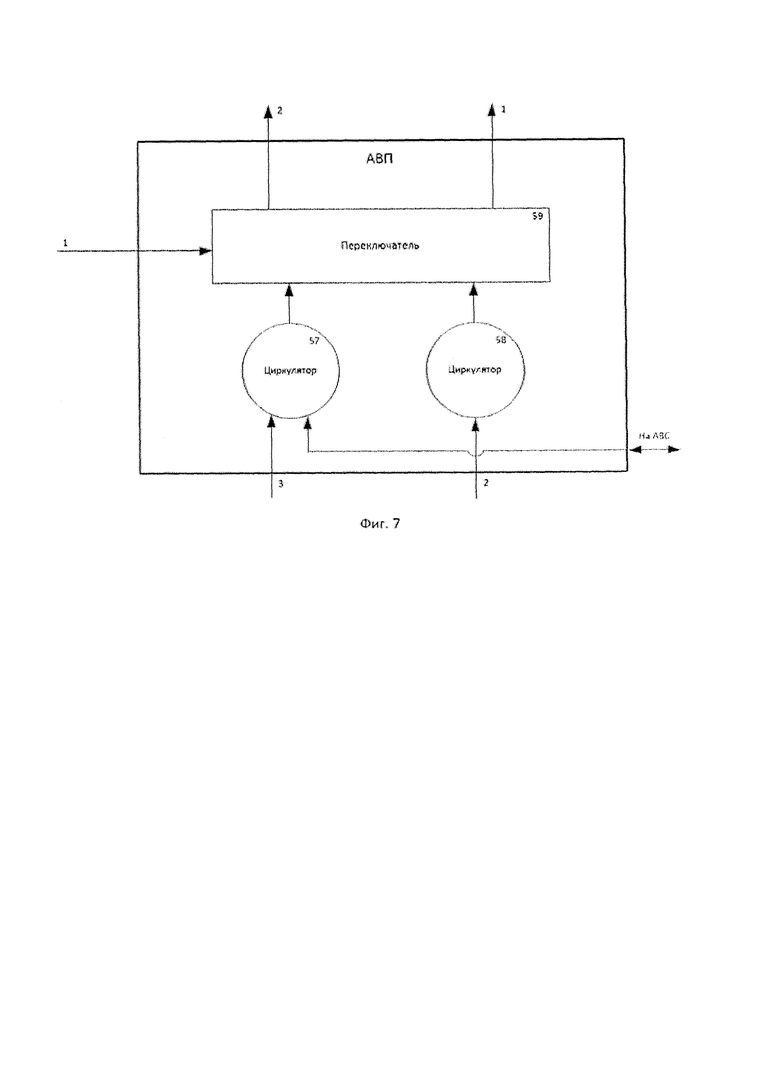
На фиг. 6 приведена блок-схема передатчика.
На фиг. 7 приведена блок схема АВП
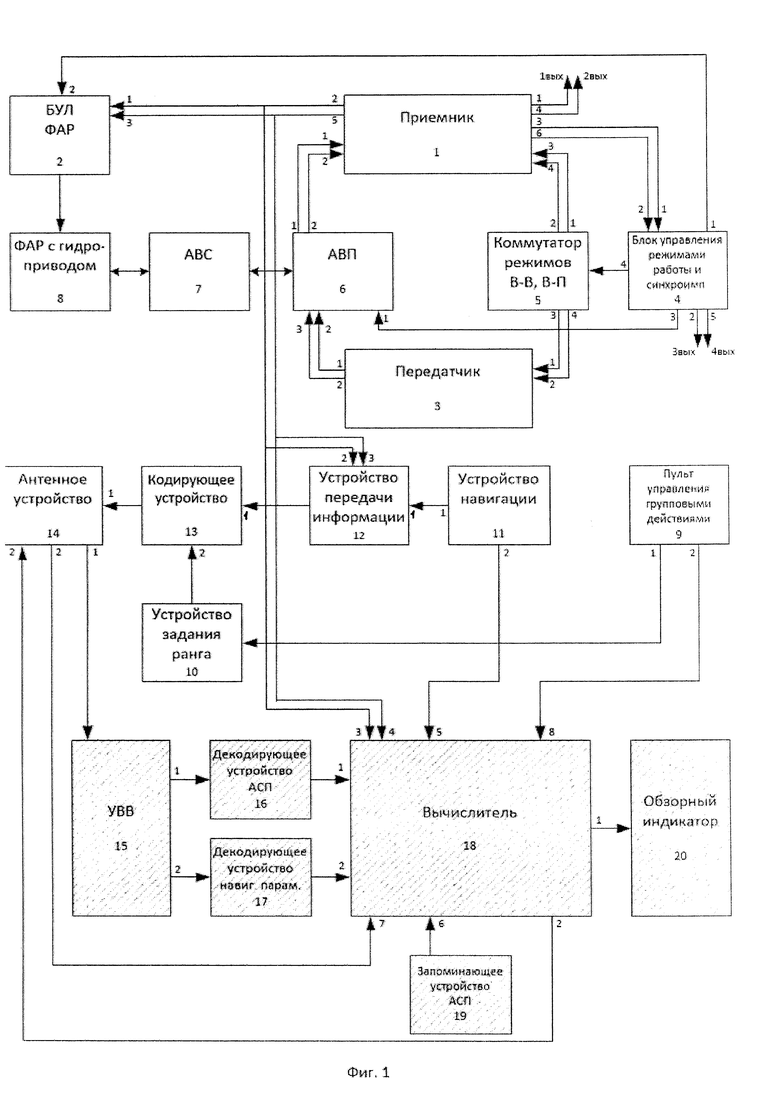
Система целераспределения подвижных объектов состоит из приемник 1, блок управления лучом ФАР (БУЛ ФАР) 2, передатчика 3, блока управления режимами работы и синхронизации 4, коммутатора режимов воздух-воздух, воздух-поверхность 5, антенно-волноводного переключателя 6, антенно-волноводной системы 7, фазированной антенной решетки 8, выполненной с гидроприводом, причем приемник 1 и передатчик 3 функционируют как в режиме воздух-воздух, так и в режиме воздух-поверхность, пульта управления 9, устройства задания ранга 10, устройства навигации 11, устройства передачи информации 12, кодирующего устройства 13, антенного устройства 14, устройства ввода вывода 15, декодирующего устройства авиационного средства поражения (АСП) 16, декодирующее средство навигационных параметров 17, вычислителя 18, запоминающее устройство АСП 19, обзорный индикатор 20,
Фазированная антенная решетка 8 взаимосвязана с антенно-волноводной системой 7, которая в свою очередь взаимосвязана с антенно-волноводным переключателем 6, первый и четвертый выходы приемника 1 являются первыми и вторым выходами системы передачи радиолокационного целеуказания для группы подвижных объектов, а второй и пятый выходы блока управления режимами работы и синхронизации 4 являются третьим и четвертым выходами системы передачи радиолокационного целеуказания для группы подвижных объектов.
Второй выход приемника 1 подключен к первому входу блока управления лучом ФАР 2, выход блока управления лучом ФАР 2 соединен с управляющим входом ФАР с гидроприводом 8, второй вход блока управления лучом ФАР 2 подключен к первому выходу блока управления режимами работы и синхронизации 4. Третий выход блока управления режимами работы и синхронизации 4 подключен к первому входу антенно-волноводного переключателя 6. Четвертый выход блока управления режимами работы и синхронизации 4 соединен шиной с входом коммутатора режима воздух-воздух, воздух-поверхность 5, первый выход коммутатора режима воздух-воздух, воздух-поверхность 5 подключен к третьему входу приемника 1, второй выход антенно-волноводного переключателя 6 подключен к второму входу приемника 1. Пятый выход приемника 1 соединен с третьим входом блока управления лучом ФАР 2, второй выход коммутатора режима воздух-воздух, воздух-поверхность 5 подключен к четвертому входу приемника 1. Третий выход коммутатора режима воздух-воздух, воздух-поверхность 5 подключен к первому входу передатчика 3, четвертый выход коммутатора воздух-воздух, воздух-поверхность 5 соединен со вторым входом передатчика 3. Первый выход передатчика 3 подключен ко второму входу антенно-волноводного переключателя 6, второй выход передатчика 3 подключен к третьему входу антенно-волноводного переключателя 6, первый выход антенно-волноводного переключателя 6 соединен с первым входом приемника 1. Третий выход приемника 1 подключен к первому входу блока управления режимами работы и синхронизации 4, а шестой выход приемника 1 соединен со вторым входом блока управления режимами работы и синхронизации 4.
Выход устройства навигации 11 соединен с первым входом устройства передачи информации, выход устройства передачи информации 12 соединен с первым входом кодирующего устройства 13, выход кодирующего устройства 13 подключен к антенному устройству 14. Выход пульта управления 9 соединен с входом устройства задания ранга 10, выход устройства задания ранга 10 подключен ко второму входу кодирующего устройства 13, а второй и пятый выходы приемника соединены соответственно со вторым и третьим входами устройства передачи информации 12.
Первый выход антенного устройства 14 соединен со входом устройства ввода-вывода 15, первый выход которого соединен с входом декодирующего устройства АСП 16, второй выход устройства ввода-вывода подключен ко входу декодирующего устройства навигационных параметров 17. Выходы декодирующего устройства АСП 16 и декодирующего устройства навигационных параметров соответственно соединены с первым и вторым входами вычислителя 18, выход которого соединен с входом обзорного индикатора 20. Второй выход приемника
1 подключен к третьему входу вычислителя 18. Пятый выход приемника соединен с четвертым входом вычислителя 18, к пятому входу которого подключен второй выход устройства навигации 11. Шестой вход вычислителя 18 соединен с выходом запоминающего устройства АСП 19, а седьмой вход вычислителя подключен ко второму выходу антенного устройства 2. Ко второму входу антенного устройства
2 подключен второй выход вычислителя 18, к восьмому входу которого подключен второй выход пульта управления групповыми действиями 9.
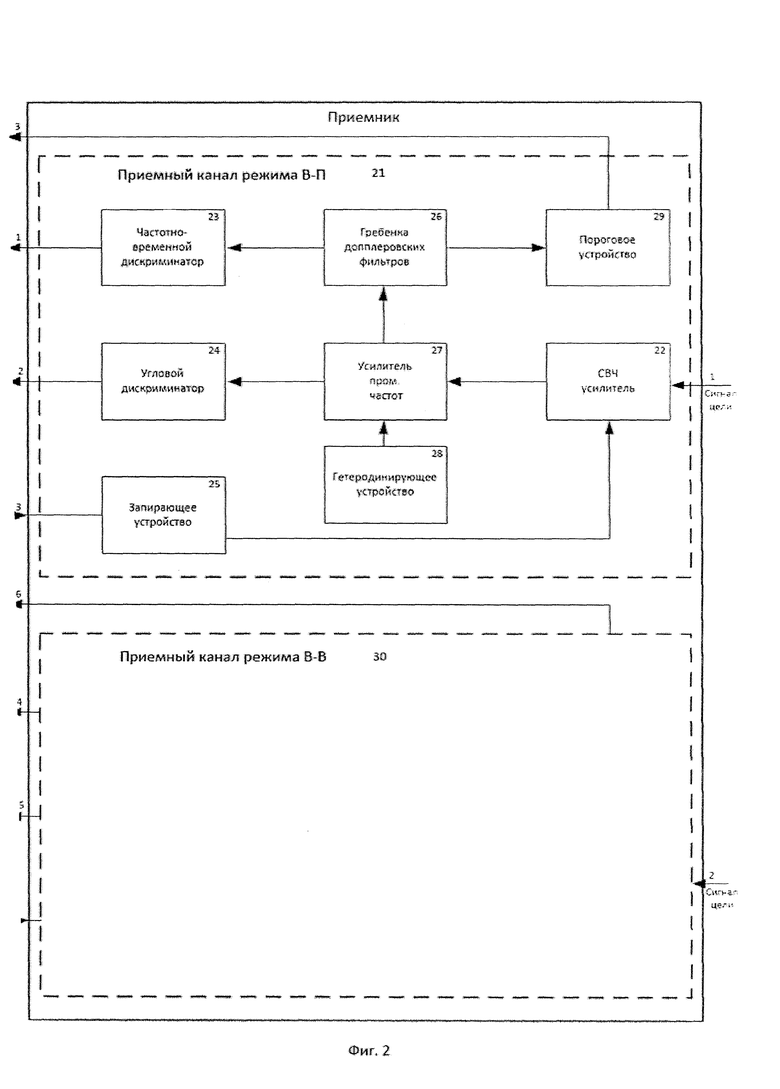
Приемник 1, пример которого приведен на фиг. 2, содержит два канала, один из которых 21 работает в режиме воздух-поверхность, а другой 30 -в режиме воздух-воздух. Каждый из каналов состоит из СВЧ усилителя 22, частотно-временного дискриминатора 23, углового дискриминатора 24, запирающего устройства 25, гребенчатого доплеровского фильтра 26, усилителя промежуточной частоты (УПЧ) 27, гетеродинирующего устройства 28, порогового устройства 29.
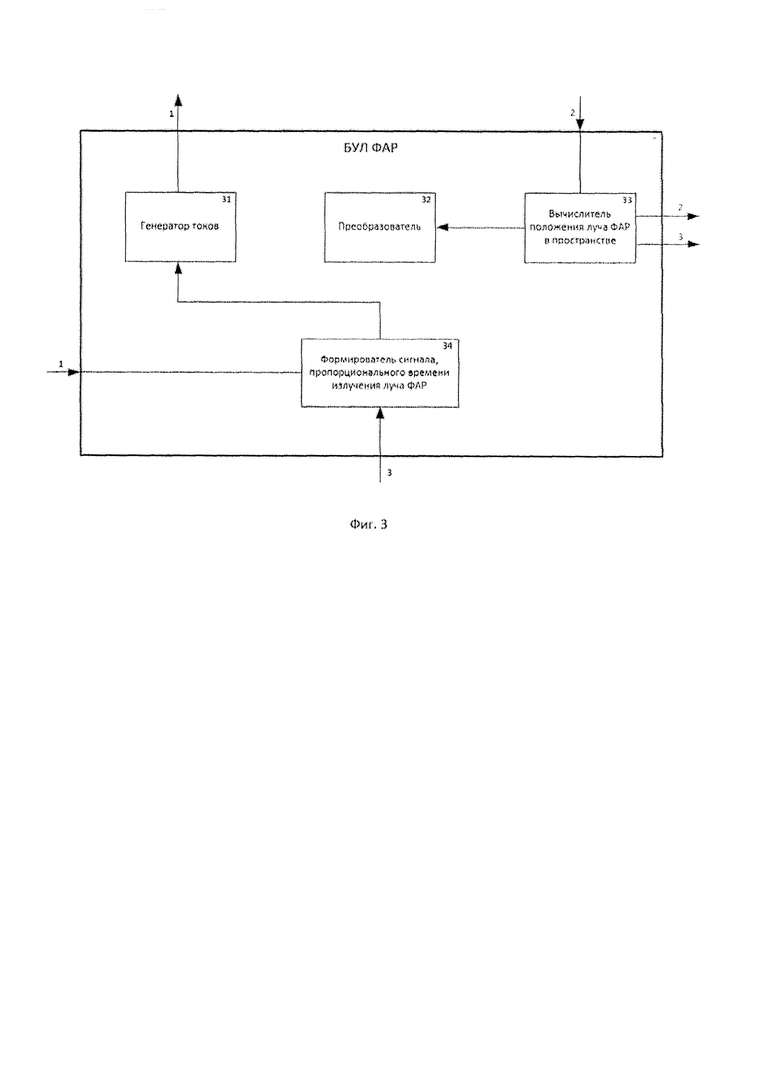
Блок управления лучом ФАР 2, пример которого приведен на фиг. 3, состоит из генератора токов 31, преобразователя 32, вычислителя положения луча ФАР в пространстве 33, формирователя сигнала, пропорционального времени изменения положения луча ФАР 34.
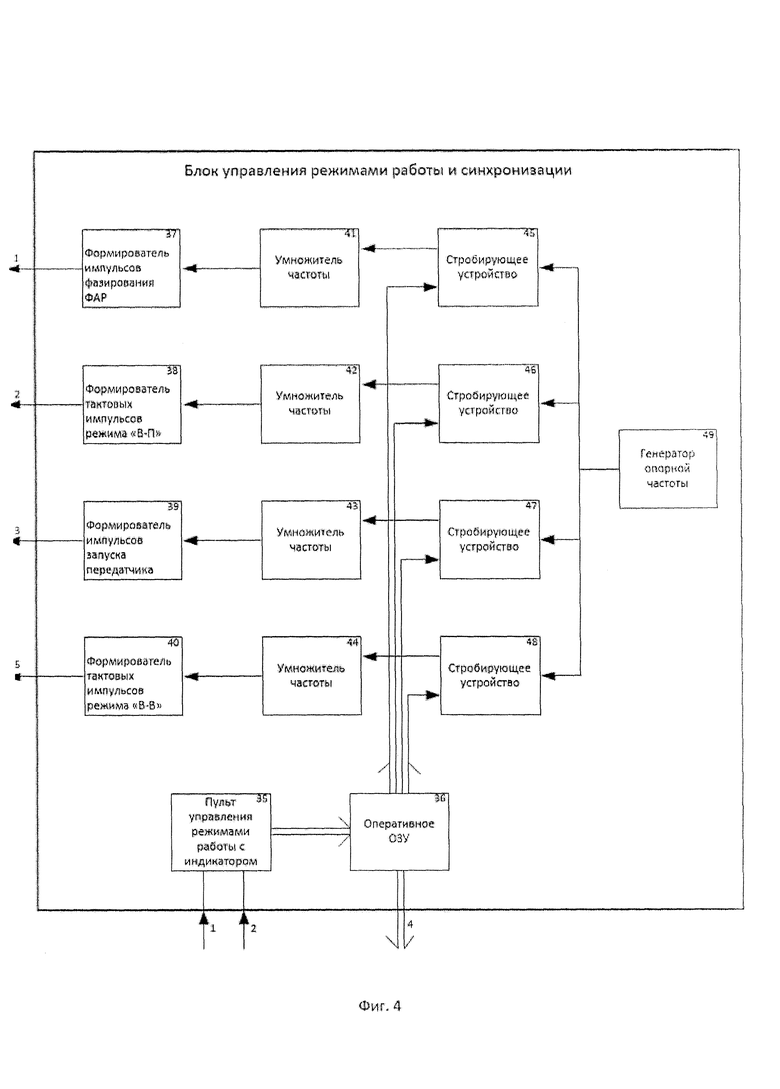
Блок управления режимами работы и синхронизации 4, пример которого приведен на фиг. 4, состоит из пульта управления режимами работы с индикатором 35, оперативного запоминающего устройства (ОЗУ) 36, состоящего из набора ячеек памяти и шины, формирователя импульсов фазирования ФАР 37, формирователя тактовых импульсов режима воздух-поверхность 38, формирователя импульса запуска передатчика 39, формирователя тактовых импульсов режима воздух-воздух 40, умножителей частоты 41, 42, 43, 44, стробирующих устройств 45, 46, 47, 48, генератора опорной частоты 49.
Коммутатор режимов воздух-воздух, воздух-поверхность 5, пример которого приведен на фиг. 5, состоит из декодера 50 и коммутирующих устройств 51, 52, 53, 54. По команде с оперативного ОЗУ 36, декодер 50 формирует управляющие сигналы в соответствии с параметрами (частотой повторения импульсов, их длительностью и скважностью) временной диаграммы, для коммутирующих устройств 51, 52, 53, 54, которые выключаются после окончания информационного слова, например при включении на выходе каждого коммутирующего устройства триггера.
Передатчик 3, пример которого приведен на фиг. 6, состоит из передающего канала режима воздух-поверхность 55 и передающего канала режима воздух-воздух 54, каждый из которых выполнен, например по схеме, приведенной в журнале Зарубежная радиоэлектроника, №2, 1982 год, Москва «Радио и связь стр. 24, и состоит из последовательно соединенных задающего генератора, на вход которого подается сигнал с соответствующего выхода коммутатора режима ВВ-ВП 5, усилителя, умножителя частоты, мощного усилителя, ко второму входу которого подключен модулятор, а выход соединен с входом циркулятора антенно-волноводного переключателя 6.
Антенно-волноводный переключатель 6, пример выполнения которого приведен на фиг. 7, состоит из циркуляторов 57, 58 и переключателя 59. На вход переключателя 59, являющийся первым входом АВП 6, поступает сигнал с блока управления режимами работы и синхронизации 4, переключающий приемник и передатчик одного режима, а на входы циркуляторов 57, 58 поступают соответственно сигналы с выходов передающего канала воздух-воздух, воздух-поверхность передатчика 3.
Система целераспределения подвижных объектов имеет несколько режимов работы, в частности режим воздух-воздух, воздух-поверхность, комбинированный режим, режим передачи целераспределения. Обработка и формирование сигнала осуществляется в реальном масштабе времени. По сигналам, поступающим с приемника 1, на индикаторе пульта управления режимами работы 35 возникают отметки цели. В зависимости от положения отметки цели, определяемой визуально оператором по индикатору пульта управления режимами работы 35 блока управления режимами работы и синхронизации 4 выдаются команды, поступающие по шине на оперативное ОЗУ 36, выбирается тот или иной режим работы в виде разовых команд, например, работа только по наземным целям или только по воздушным целям или комбинированный режим по нескольким воздушным и наземным целям или режим целеуказания. По этим командам в блоке управления режимами работы и синхронизации 4 из оперативного ОЗУ 36 выбираются заранее определенные сигналы, пропорциональные численным параметрам (длительности импульсов, частоте повторения, скважности) временной диаграммы работы системы передачи радиолокационного целераспределения для группы подвижных объектов, которые поступают в соответствующие выбранному режиму стробирующие устройства, на другой вход которых поступает синусоидальный сигнал с генератора опорной частоты 49. Далее с выходов стробирующих устройств сигналы поступают на соответствующие умножители 41, 42, 43, 44, в которых частота последовательности импульсов умножается на коэффициент умножения, соответствующий каждому из режимов работы системы целераспределения подвижных объектов и далее подаются на соответствующие формирователи импульсов, либо 37, либо 38, либо 39, либо 40. Например, в случае подачи сигнала с умножителя частоты 41 на формирователь импульсов фазирования ФАР 37 на нем формируется сигнал, определяющий начало фазирования, положение луча ФАР в пространстве и подается на вычислитель сигнала, пропорционального положению луча в пространстве 33 блока управления ФАР 2.
В ОЗУ вычислителя положения луча в пространстве 34 записаны углы, характеризующие положение луча ФАР в пространстве по осям X и Y, Qx, Qy, которые в зависимости от сигнала, поступающего с формирователя импульсов фазирования ФАР 38, поступают на первый и второй выходы системы целерапределения подвижных объектов.
Для управления фазой излучаемых ФАР электромагнитных колебаний в арифметическом устройстве вычислителя положения луча ФАР в пространстве 33 вычисляются сигналы, пропорциональные фазам излучаемых электромагнитных колебаний по следующему алгоритму (для ФАР, состоящей из излучающих элементов, расположенных строчно-столбцевым методом) М.С. Нейман Курс радиопередающих устройств. Издательство «Советское радиол г. Москва 1965 г. стр. 14
ϕmn=2π/λ, (ndcosQx+mdcosQy)
где m - номер строки,
n - номер столбца,
λ - длина волны,
d - расстояние между излучающими элементами, которые затем после преобразования в аналоговую форму в преобразователе 32 управляют током генератора токов 31, ток которого в свою очередь, протекая через фазовращатели ФАР, изменяют их фазы. На формирователь сигнала, пропорционального времени изменения положения луча ФАР 34 блока управления лучом ФАР 2, поступает в зависимости от выбранного режима работы сигнал с углового дискриминатора приемного канала режима воздух-поверхность 24 приемника 1, либо с углового дискриминатора приемного канала режима воздух-воздух приемника 1, соответствующий определенному моменту времени. Формирователь сигнала, пропорционального времени изменения положения луча ФАР 34, формирует сигнал, соответствующий данному моменту времени и определенному положению луча ФАР в пространстве, который далее управляет током в генераторе токов 31. С генератора токов 31 блока управления лучом ФАР 2 сигнал подается на фазовращатели (управляющий вход) ФАР с гидроприводом 8 для корректировки положения диаграммы направленности ФАР в пространстве. Выполнение фазированной антенной решетки с гидроприводом позволяет расширить углы прокачки и повысить вероятность обнаружения целей на максимальной дальности. С формирователя импульсов запуска передатчика 39 блока управления режимами работы и синхронизации 4 подаются импульсы, управляющие антенно-волноводным переключателем 6, подключающим либо передатчик 3, либо приемник 1. Одновременно с блока управления режимами работы и синхронизации 4 сигнал поступает на коммутатор режима воздух-воздух, воздух-поверхность 5, коммутирующий режимы воздух-поверхность, воздух-воздух.
После излучения сигнала в пространство и приема отраженного от цели сигнала работа системы передачи радиолокационного целераспределения подвижных объектов осуществляется следующим образом. Команда на переключение режима работы воздух-поверхность, воздух-воздух, комбинированного режима или режима передачи целеуказания выдается оператором по результатам работы системы целераспределения для подвижных объектов, при превышении сигнала над пороговым значением и поступающего с порогового устройства 29 приемного канала режима воздух-поверхность приемника 1, либо с порогового устройства приемного канала воздух-воздух приемника 1, и отображенным на индикаторе пульта управления режимами работы 35 блока управления режимами работы и синхронизации 4. По изображению, полученному с индикатора, оператор принимает решение об обнаружении, захвате и сопровождении цели или передачи целераспределения.
В режиме воздух-воздух система целераспределения подвижных объектов работает аналогичным образом за исключением изменения параметров временной диаграммы и подключения коммутатором режима воздух-воздух, воздух-поверхность 5 по команде оператора с блока управления режимами работы и синхронизации 4 приемного канала режима воздух-воздух приемника 1, передающего канала режима воздух-воздух передатчика 3.
В случае комбинированного режима, обработка и формирование сигнала в котором осуществляется в реальном масштабе времени, с пульта управления режимами работы 35 на оперативное ОЗУ 36 поступает команда от оператора на подключение соответствующих этому режиму ячеек памяти и вся система переходит в режим последовательного обзора попеременно то воздушного, то наземного пространства, при этом подключаются то передающий канал режима воздух-поверхность передатчика 3, то приемный канал режима воздух-поверхность приемника 1.
Режим целераспределения реализуется по команде оператора с пульта управления групповыми действиями 9 на основании информации о тактической обстановке, полученной им с индикатора пульта управления режимами работы 35. В системе целераспределения для группы подвижных объектов командир группы запоминает параметры назначенных каждому ведомому целей и сектора ответственности в своем массиве с учетом их типа (воздушная или наземная), которые упаковываются в унифицированный массив данных, реализуемых в кодирующем устройстве 13 и передающихся через антенное устройство 14 каждому ведомому. Обмен между объектами осуществляется с различными циклограммами обмена. Тип циклограммы обмена задается с пульта управления групповыми действиями 9, при этом для каждого типа объекта устанавливается устройством задания ранга 10 его ранг. Общее время работы системы целераспределения подвижных объектов в комбинированном режиме не превышает время обзора и перераспределяется в зависимости от количества обнаруженных наземных и воздушных целей.
При использовании на подвижных объектах многоцелевых радиолокационных станций и сопровождении большого количества целей при использовании ручного режима целераспределения оператору требуется значительное время для проведения режима целераспределения и как следствие уменьшается время для принятия решения об атаке целей. Для устранения этого недостатка используется режим автоматического целераспределения, который исключает ручное участие оператора в этом процессе и осуществляет интеллектуальную поддержку оператора.
Включение режима автоматического целераспределения осуществляется со второго выхода пульта управления групповыми действиями 9. При этом с антенного устройства 14 на устройство ввода-вывода 15 передается принятая им информация от взаимодействующих самолетов группы. С первого выхода устройства ввода- вывода 15 информация о параметрах авиационных средств поражения через декодирующее устройство АСП 16 поступает на первый вход вычислителя 18, а навигационная информация взаимодействующих самолетов группы со второго устройства ввода-вывода 15 после декодирования в устройстве декодирования навигационных параметров 17 поступает на второй вход вычислителя 18.
На третий и четвертый входы вычислителя 18 с приемника 1 поступают параметры воздушных и наземных целей сопровождаемых локатором собственного самолета. На пятый вход вычислителя 18 поступают навигационные параметры со второго выхода устройства навигации 11. На шестой вход вычислителя 18 поступает информация обо всех используемых АСП траекториях из запоминающего устройства АСП 20. В вычислителе 18 осуществляется вычисление координат взаимодействующих самолетов группы в системе координат собственного самолета, формируется массив начальных данных по времени полета АСП при пуске с каждого носителя до каждой сопровождаемой цели и производится выбор наилучшего плана распределения ограниченных ресурсов АСП для поражения сопровождаемых целей по критерию минимального времени подлета используемых АСП с различных самолетов группы («Метод линейного программирования с отысканием min линейной функции при наличии ограничений линейных функций» Вентцель Е.С. «Исследование операций» М. «Сов. радио» 1972 г.; «Справочник по исследованию операций» под общей ред. Ф.А. Матвейчука, М Воениздат, 1979 г. раздел 3.1.).
С первого выхода 18 результаты оптимизации в виде назначенных пар самолет-цель поступают на обзорный индикатор 20, где отображаются результаты целераспределения для группы взаимодействующих самолетов.
В случае, если оператору необходимо изменить полученное автоматическое целераспределение, команда со второго выхода пульта управления групповыми действиями 9 и оператор возвращается в режим ручного целераспределения по команде с первого выхода пульта управления групповыми действиями 9.
Таким образом, система целераспределения подвижных объектов позволяет обнаруживать, захватывать и сопровождать в просматриваемой зоне наземные и воздушные цели и их комбинацию и назначать на атаку цели для каждого подвижного объекта, в результате чего происходит
- автоматическое формирование величины зоны обзора;
- автоматическое управление центром зоны обзора, соответствующее заданному фактору ответственности;
- включение режима работы воздух-воздух, воздух-поверхность с отображением на своем индикаторе;
- отождествление обнаруженных целей радиолокационной станцией с целями, переданными в режиме целераспределения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовая радиолокационная станция | 2016 |
|
RU2609156C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ САМОЛЕТНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2001 |
|
RU2188436C1 |
| Бортовая радиолокационная станция | 2019 |
|
RU2719547C1 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2642490C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2019 |
|
RU2729704C1 |
| Многофункциональный бортовой радиолокационный комплекс | 2017 |
|
RU2670980C9 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
Изобретение относится к области радиолокации, в частности к радиолокационным станциям, устанавливаемым на подвижных объектах. Достигаемый технический результат – решение целевых задач и получение координатной информации для осуществления траекторного взаимодействия при групповых действиях самолетов. Указанный результат достигается за счет того, что система целераспределения подвижных объектов содержит фазированную антенную решетку (ФАР), выполненную с гидроприводом, антенно-волноводную систему, антенно-волноводный переключатель, приемник, передатчик, блок управления лучом ФАР, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность, устройство навигации, устройство передачи информации, кодирующее устройство, антенное устройство, пульт управления групповыми действиями, устройство задания ранга, устройство ввода-вывода, декодирующее устройство авиационных средств поражения (АСП), декодирующего устройства навигационных параметров, вычислитель, запоминающее устройство траекторий (АСП) и обзорный индикатор, определенным образом выполненные и соединенные между собой. 7 ил. 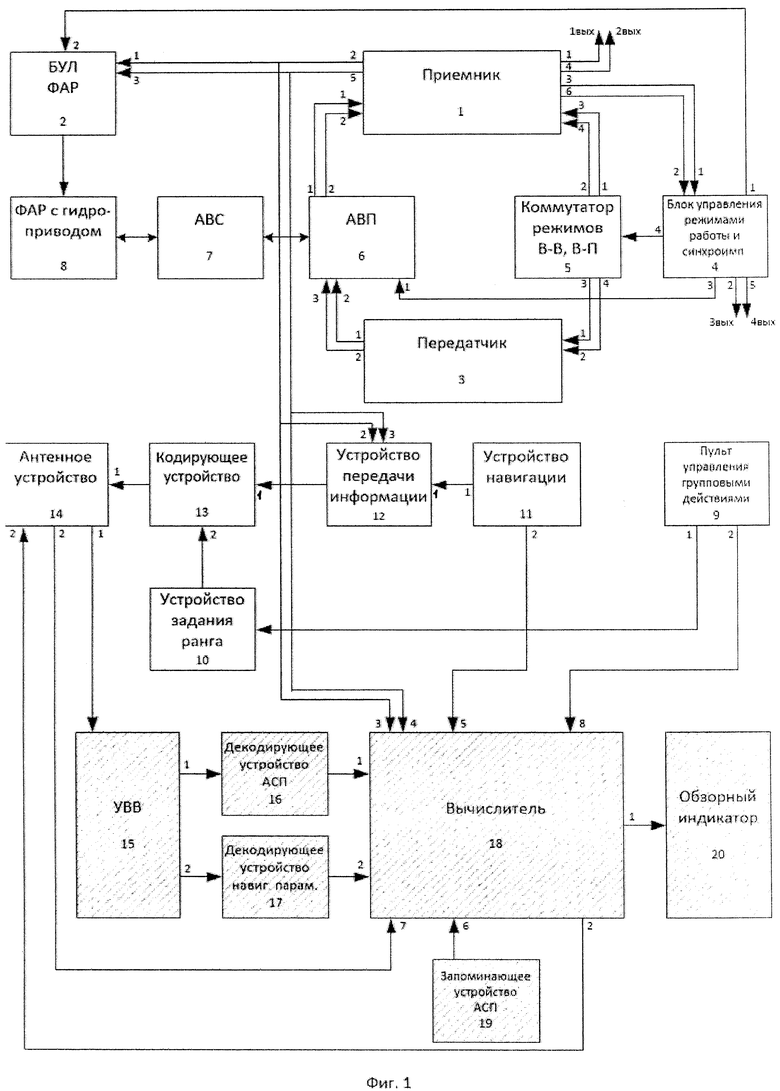
Система целераспределения подвижных объектов, содержащая фазированную антенную решетку (ФАР), выполненную с гидроприводом, антенно-волноводную систему, антенно-волноводный переключатель, приемник, передатчик, функционирующие как в режиме воздух-воздух, так и в режиме воздух-поверхность, причем фазированная антенная решетка взаимосвязана с антенно-волноводной системой, которая в свою очередь взаимосвязана с антенно-волноводным переключателем, блок управления лучом ФАР, блок управления режимами работы и синхронизации, коммутатор режимов воздух-воздух, воздух-поверхность, первый и четвертый выходы приемника являются первыми и вторым выходами системы целераспределения для подвижных объектов, а второй и пятый выходы блока управления режимами работы и синхронизации являются третьим и четвертым выходами системы целераспределения для подвижных объектов, второй выход приемника подключен к первому входу блока управления лучом ФАР, выход блока управления лучом ФАР соединен с управляющим входом ФАР с гидроприводом, второй вход блока управления лучом ФАР подключен к первому выходу блока управления режимами работы и синхронизации, третий выход блока управления режимами работы и синхронизации подключен к первому входу антенно-волноводного переключателя, четвертый выход блока управления режимами работы и синхронизации соединен шиной с входом коммутатора режима воздух-воздух, воздух-поверхность, первый выход коммутатора режима воздух-воздух, воздух-поверхность подключен к третьему входу приемника, второй выход антенно-волноводного переключателя подключен к второму входу приемника, пятый выход приемника соединен с третьим входом блока управления лучом ФАР, второй выход коммутатора режима воздух-воздух, воздух-поверхность подключен к четвертому входу приемника, третий выход коммутатора режима воздух-воздух воздух-поверхность подключен к первому входу передатчика, четвертый выход коммутатора воздух-воздух воздух-поверхность соединен со вторым входом передатчика, первый выход передатчика подключен ко второму входу антенно-волноводного переключателя, второй выход передатчика подключен к третьему входу антенно-волноводного переключателя, первый выход антенно-волноводного переключателя соединен с первым входом приемника, третий выход приемника подключен к первому входу блока управления режимами работы и синхронизации, а шестой выход приемника соединен со вторым входом блока управления режимами работы и синхронизации, первый выход устройства навигации соединен с первым входом устройства передачи информации, выход устройства передачи информации соединен с первым входом кодирующего устройства, выход кодирующего устройства подключен к первому входу антенного устройства, пульт управления групповыми действиями, первый выход которого соединен с входом устройства задания ранга, выход устройства задания ранга подключен ко второму входу кодирующего устройства, а второй и пятый выходы приемника соединены соответственно со вторым и третьим входами устройства передачи информации, отличающаяся тем, что дополнительно введены устройство ввода-вывода, декодирующее устройство авиационных средств поражения, декодирующее устройство навигационных параметров, вычислитель, запоминающее устройство траекторий авиационных средств поражения, обзорный индикатор, причем первый выход антенного устройства соединен с входом устройства ввода-вывода, первый выход которого соединен с входом декодирующего устройства авиационных средств поражения, второй выход устройства ввода-вывода подключен к входу декодирующего устройства навигационных параметров, выходы декодирующего устройства авиационных средств поражения и декодирующего устройства навигационных параметров соответственно соединены с первым и вторым входами вычислителя, выход которого соединен с входом обзорного индикатора, второй выход приемника подключен к третьему входу вычислителя, пятый выход приемника соединен с четвертым входом вычислителя, к пятому входу которого подключен второй выход устройства навигации, шестой вход вычислителя соединен с выходом запоминающего устройства авиационных средств поражения, а седьмой вход вычислителя подключен ко второму выходу антенного устройства, ко второму входу антенного устройства подключен второй выход вычислителя, восьмой вход которого соединен со вторым выходом пульта управления групповыми действиями.
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ САМОЛЕТНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2001 |
|
RU2188436C1 |
| Автоматический воздушный клапан | 1939 |
|
SU58730A1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ САМОЛЕТА | 2002 |
|
RU2216484C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1998 |
|
RU2145720C1 |
| EP 803787 A1, 29.10.1997 | |||
| JP 2011137650 A, 14.07.2011 | |||
| US 20100030402 A1, 04.02.2010. | |||

