РЬвестен копер для выбивки оправок нз пакетов роторов электродвигателей, включающий раму, шабот, бабу с бойком, привод для ее подъема и устройство для захвата бабы.
Предложенпый копер отличаетея от известного тем, что баба снабжена упором, установленным сооеио с бойком, а устройство для захвата выполнено в виде подъемной рамкп с укрепленными на ней цилиндром, шток которого шариирно соединен с рычажными захватами, и двумя втулками с подвижными пальцами, иредназначеннымн для взаимодействия с захватами и унором. Это повышает надежноеть работы установки.
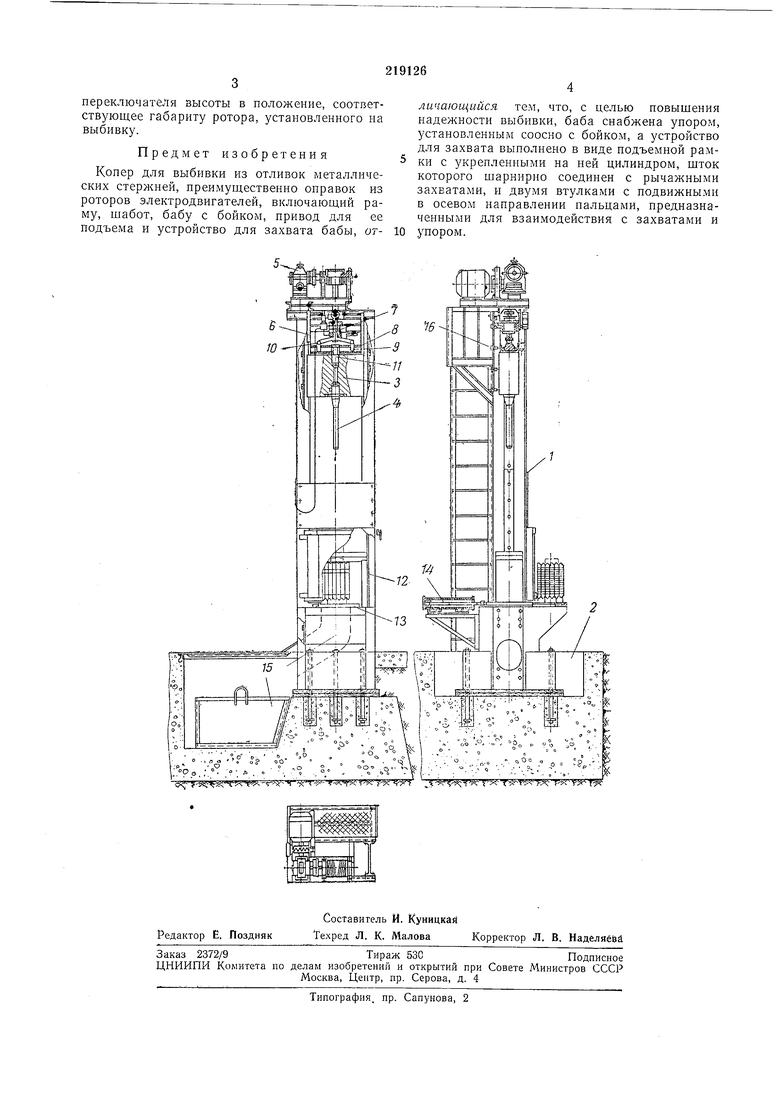
На чертеже схематичееки предетавлен описываемый копер в трех проекциях.
Он включает вертикальную раму 1, состояшую из двух балок двутаврового сечения, шабот 2, бабу 3 с бойком 4, привод 5 для ее подъема и устройство для захвата бабы. Последнее выполнено в виде подъемной рамки 6 с укрепленными в ее верхней части цилиндром 7, а в нижней - двумя втулками 8 с ПОДВИЖНЫ1МИ пальцами 9. На штоке цилиндра 7 шарнирно укреплены захваты 10, взанмодейетвующие с пальцами 9. Баба 3 снабжена упором //, установленным еоосно с бойком 4, с которым взаимодействуют пальцы 9,
осуществляя захват бабы 3. Рамка 6 вместе е бабой 3 перемещается внутри рамы / по ианравляющнм 12. На шаботе 2 размещен подвижной загрузочный стол 13, который с помощью пневматического цилиндра 14 подает пакет ротора с загрузочного места в зону удара бабы и обратно.
Пр1ШЦ11п действия копра состоит в следующем.
Подается комапда на удар, срабатывает пиевмоцплнндр захватного устройства, через систему захватов 10 раздвпгаютея пальцы 9, которые освобождают бабу 3. Последняя падает, и одновремепно с ней опускаетея захватпое устройство бабы. Боек 4 ударяет по оправке пакета ротора и выбивает его. Выбитые онравкп через сквозные отверстия подвижного стола 13 и шабота 2 попадают в ящик 15. При сопрнкосиовенни захватного устройства с
бабой 3 срабатывает конечный выключатель, который подает команду на захват бабы. При этом захваты 10 закрываются, фиксируя бабу 3, срабатывает выключатель, и захватное устройство приводом 5 иодннмаетея вверх до
заранее установленной высоты (на направляющих 12 рамы 1 установлены бесконтактные путевые выключатели 7(). Управление бабы на нужную высоту производят с электропульта, переводя рукоятку
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОСКОРОСТНОЙ КОПЕР | 1966 |
|
SU189292A1 |
| Устройство для измельчения древесины | 1974 |
|
SU488710A1 |
| Подвижной копер для раздробления чугунных чушек ударной бабой | 1936 |
|
SU52830A1 |
| УСТРОЙСТВО ДЛЯ ПРИБИВКИ КРЫШКИ К КОРПУСУ ЯЩИКА | 1972 |
|
SU431006A1 |
| ГЛУБОКОВОДНЫЙ СВАЕБОЙНЫЙ КОПЕР | 2009 |
|
RU2498016C2 |
| ДИНАМИЧЕСКОЙ ШТАМПОВКИ ЗАГОТОВОК | 1972 |
|
SU359088A1 |
| УСТРОЙСТВО для ЗАБИВКИ СВАЙ | 1970 |
|
SU284706A1 |
| АВТОМАТИЧЕСКИЙ КОПЕР | 1970 |
|
SU265502A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ УДАРНЫМ СПОСОБОМ | 2012 |
|
RU2517267C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА«ик.;1^Л>&Юс$НАЯШ1цт~штчЕн^1^4Н&Л!/,иГЕНА | 1972 |
|
SU344714A1 |
