Изобретение относится к строительной технике и может быть применено преимущественно для монтажа стеклянных панелей и витрин строящихся зданий.
Известны устройства для монтажа в основном стеклянных панелей и витрин, содержащие самоходную тележку с щарнирной мачтой, несущей грузовую каретку, на которой смонтирована захватная рамка с вакуум-присосками.
Предлагаемое устройство отличается от известных тем, что, с целью повышения производительности труда, на конце грузовой каретки закреплена шарнирная рама, на верхней стороне которой смонтирована подвижная в поперечном направлении каретка, соединенная с захватной рамкой п снабженная механизмом точной доводки захватной рамки в пространстве.
Каретка поперечного хода выполнена в виде шарнирного четырехзвенника, состоящего из несущей рамы с щарнирным оголовком. Рама соединена с тягой, связанной с консольным щарнирным рычагом с роликом, входящим в зацепление с направляющей подъемной каретки.
Механизм точной доводки захватной рамки выполнен в виде винтового механизма, связанного с полым щтоком, который одновременно соединен посредством подвижного звена с винтом поворота захватной рамки и с винтом ее наклона. Для обеспечения фиксируемого изменения положения захватной рамки она соединена с полым штоком и винтами механизма доводки посредством шаровых опор.
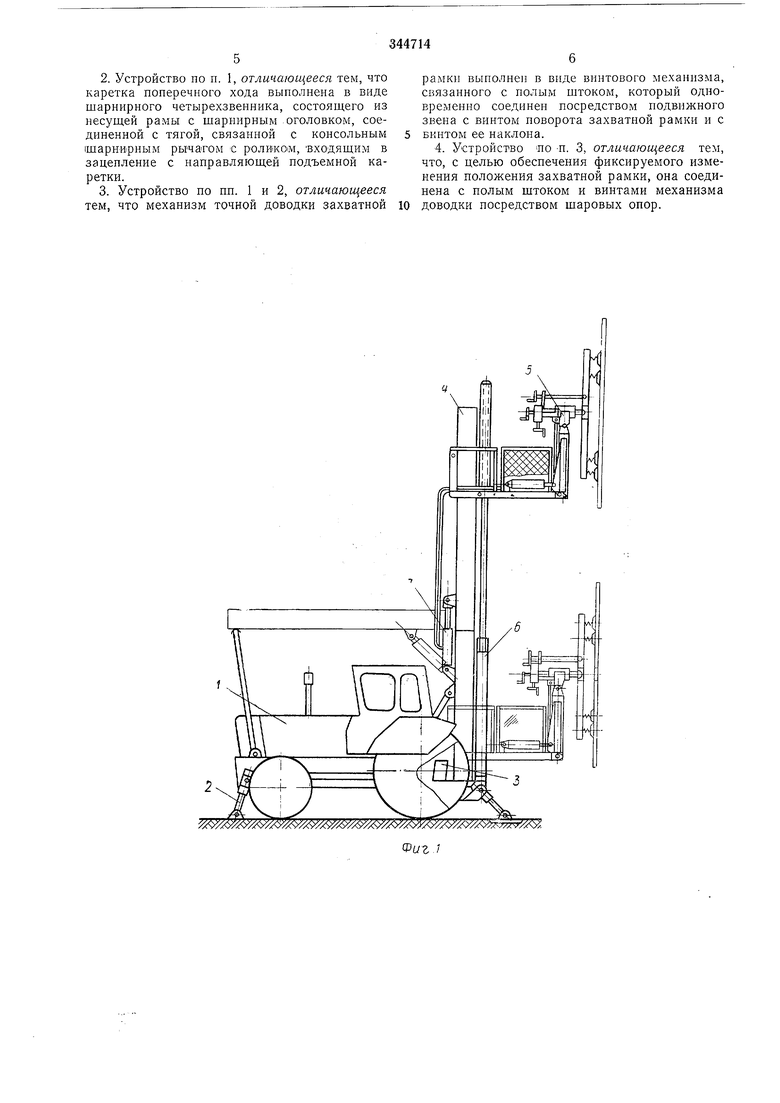
Па фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - подъемная каретка с рабочим органом; на фиг. 3 - каретка поперечного хода, вид сбоку; на фиг. 4 - то же, вид спереди; на фиг. 5 - оголовок каретки поперечного хода в разрезе; на фиг. 6- шаровые опоры захватной рамки.
Предлагаемое устройство содержит базовую самоходную машину / с управляемыми выносными опорами 2, вакуум-иасос 3, приводимый в движение от вала отбора мощности, складывающуюся мачту 4, грузовую каретку 5 с рабочим органом и телескопическим гидроцилиндром 6 подъема каретки и гидроцилиндр 7 для складывания мачты. Грузовая каретка с рабочим органом содержит подъемную каретку 8 с площадкой для обслуживающего персонала, пультом 9 управления и ресивером 10, наклоняющуюся раму // с кареткой 12 поперечного хода, винтовым механизмом 13 привода каретки поперечного хода, захватной рамкой 14 с вакуумными присосами 15 и гидроцилиндрами привода наклоняющейся рамы. Грузовая каретка перемещается вдоль
складывающейся мачты, грани которой являются направляющими.
Каретка поперечного хода (см. фиг. 3 и 4), перемещающаяся в направляющих наклоняющейся рамы посредством винтового механизма, содержит несущую раму 16, оголовок 17, тягу 18, рычаг 19 и самоудерживающийся кронштейн 20 с роликом 21. Несущая рама, оголовок, тяга и рычаг соединены между собой шарнирно, образуя параллелограммную систему.
Оголовок (см. фиг. 5) имеет корпус 22, полый щток 23, винтовой механизм 24 выдвижения полого щтока, поворотную шлицевую напра1вляющую 25 и винтовой механизм 26 поворота полого штока.
На двух кронштейнах 27 полого штока 23, расположенных под углом 90° один относительно другого, установлены два винтовых механизма 28 наклона захватной рамки. У передней торцовой части полый шток имеет неподвижно соединенную с ним опору 29 с резьбой (ПОД винт механизма 24 выдвижения полого штока и шаровым концом с двумя прорезями, а у другой торцовой части - шлицевую (направляющую) втулку 25.
Захватная рамка 14 шарнирно навешивается на опору 29 полого штока 23 каретки поперечного хода с помощью шаровой опоры 30. Такое соединение захватной рамки с кареткой лаперечного хода обеспечивает раме две степени свободы. Захватная рамка имеет также шаровые опоры 31 для винтовых механизмов 28 наклона захватной рамки, расположенные под углом 90° одна к другой, а также оборудуется вакуумными присосами 15, соединенными резиновыми шлангами с пультом управления. Пульт управления имеет гидрораспределитель для управления телескопическим гидроцилиндром 6. подъема рабочего органа и гидроцилиндрами привода наклоняюшейся рамы 11, а также кран отключения вакуумных присосов от ресивера 10.
При доставке стекла от разметочного стола к месту установки машина подъезжает к столу. Включается вакуум-насос 3, и создается разрежение в ресивере 10. Для захвата стекла из горизонтального положения производится предварительно отключение параллелограммной системы каретки 12 поперечного хода, что осуществляется отводом рычага 19 из направляющей подъемной каретки 8 рабочего органа. В этот момент оголовок 17 удерживается от опрокидывания вперед благодаря упору, опирающемуся на несущую раму 16 каретки поперечного хода. Затем с пульта 9 управления производится подача рабочей жидкости в гидроцилиндры наклоняющейся рамы //, которая вместе с захватной рамкой 14 .переводится в горизонтальное положение и накладывается на стекло, лежащее на разметочнрм столе. После этого (с пульта) поворотом отключающего крана приводят в действие вакуумные присосы 15, и захватывают стекло. Затем наклоняющаяся рама // с захватной рамкой 14 и удерживаемым на ней стеклом переводится в вертикальное положеиие. Поворотом кронштейна 20 производится включение параллелограммной системы каретки поперечного хода. При необходимости захватная рамка со стеклом может быть повернута на 90° посредством вращения маховичка привода винтового механизма 26 поворота полого штока 23. Со стеклом, удерживаемым
в вертикальном положении, машина перемещается к месту установки стекла.
При монтаже стеклянных панелей и витрин машина предварительно устанавливается на выносные опоры 2. Мачта 4 переводится в
вертикальное положение (при монтаже стекла на первом этаже мачта может оставаться в транспортном положении). .После этого с пульта 9 управления приводится в действие телескопический гидроцилиндр в, и грузовая
каретка 5 перемещается на .необходимую вы-. соту. Затем производится грубая наводка стекла путем наклона вперед наклоняющейся рамы 11, что осуществляется приведением в действие с пульта 9 управления гидроцилиндров. При этом параллелограммная система каретки 12 поперечного хода включена (т. е. ролик 21 кронштейна 20 удерживается направляющей), что обеспечивает параллельное перемещение захватной рамки 14 со стеклом вперед. Ролик 21 направляющей удерживается благодаря смещению точки приложения удерживающего усилия относительно оси крепления кронштейна 20, что создает момент сил, препятствующий выходу ролика из направляющей. После этого производится точная наводка стекла по нижней кромке путем вращения маховичков винтовых механизмов 24, 26 привода каретки поперечного хода, выдвижения полого штока 23, поворота полого щтока,
наклона захватной рамки 14. После этого с пульта управления отключаются вакуумные присосы 15. Стекло нижней кромкой опускается на переплет витринного проема, и затем вращением маховичка механизма 28 наклона
захватной рамки 14 стекло окончательно доводится на место. После установки стекло закрепляется, захватная рамка отводится в исходное положение, рабочий орган опускается, мачта складывается, и выносные опоры поднимаются.
Предмет изобретения
1. Устройство для монтажа преимущественно стеклянных панелей и витрин, содержащее
самоходную тележку с шарнирной мачтой, несущей грузовую каретку, на которой смонтирована захватная рамка с вакуум-присосками, отличающееся тем, что, с целью повышения производительности труда, на конце грузовой
каретки закреплена щарнирная ра.ма, на верхней стороне которой смонтирована подвижная в поперечном направлении каретка, соедиценная с захватной рамкой и снабженная механизмом точной доводки захватной рамки в
2.Устройство no п. 1, отличающееся тем, что каретка поперечного хода выполпеиа в виде шарнирного четырехзвенника, состоящего из несущей рамы с щарнирным .оголовком, соединенной с тягой, связанной с консо 1ьным шарнирным рычагом с , входящим в зацепление с направляющей подъемной каретки.
3.Устройство по пп. 1 и 2, отличающееся тем, что механизм точной доводки захватной
рамки выполнен в виде винтового механизма, связанного с полым щтоком, который одновременно соединен посредством подвижного звена с винтом поворота захватной рамки и с БИНТОМ ее наклона.
4. Устройство по П. 3, отличающееся тем, что, с целью обеспечения фиксируемого изменения положения захватной рамки, она соединена с полым щтоком и винтами механизма доводки посредством щаровых опор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для монтажа строительных конструкций | 1979 |
|
SU861290A1 |
| Балансирная траверса | 1981 |
|
SU1013389A1 |
| САМОХОДНЫЙ СВАЙНЫЙ КОПЕР | 1967 |
|
SU192076A1 |
| УСТРОЙСТВО для УСТАНОВКИ и ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ ПРЕДМЕТОВ | 1971 |
|
SU312818A1 |
| РАБОЧИЙ ОРГАН ЛЕСОПОСАДОЧНОЙ МАШИНЬlUlEHTHO-TCXrlii^Ell : | 1971 |
|
SU309672A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ КРЫТЫХ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ЗАТАРЕННЫМИ В МЕШКИ ГРУЗАМИ | 1974 |
|
SU356920A1 |
| Устройство для подъема сменной грузонесущей емкости транспортного средства | 1986 |
|
SU1386501A1 |
| ВАЛОМНО-ПОГРУЗОЧНАЯ СТРЕЛА | 1965 |
|
SU170239A1 |
| УСТРОЙСТВО для СОВМЕЩЕНИЯ ЗАГОТОВОК ТВЕРДЫХ | 1970 |
|
SU259975A1 |
| ПРЕСС ДЛЯ ВУЛКАНИЗАЦИИ РЕЗИНОВЫХ ИЗДЕЛИЙ | 1965 |
|
SU176382A1 |




: ; к %У% % :9(
Фиг I
Фиг. 2
27
,28
ЯХЗ
29
22
Фиг. 5
