Изобретение касается машин для посадки растений, в которых для захватывания последних с транспортера, с целью перемещения их в углубления, образованные в почве автоматически действующим клином, применены щипцы, приводимые в колебательное движение от оси ходовых колес машины. В предлагаемой машине, для поворачивания предназначенных к посадке растений корнями вниз при захватывании их с транспортера щипцами, губка последних установлена на поворотном рычаге с некоторым радиальным смещением относительно другой губки, укрепленной на подвижном стержне. В качестве транспортера применена свернутая в рулон лента, снабженная выступами, образующими гнезда для растений, и отверстиями для сцепления ленты с ведущей зубчаткой.
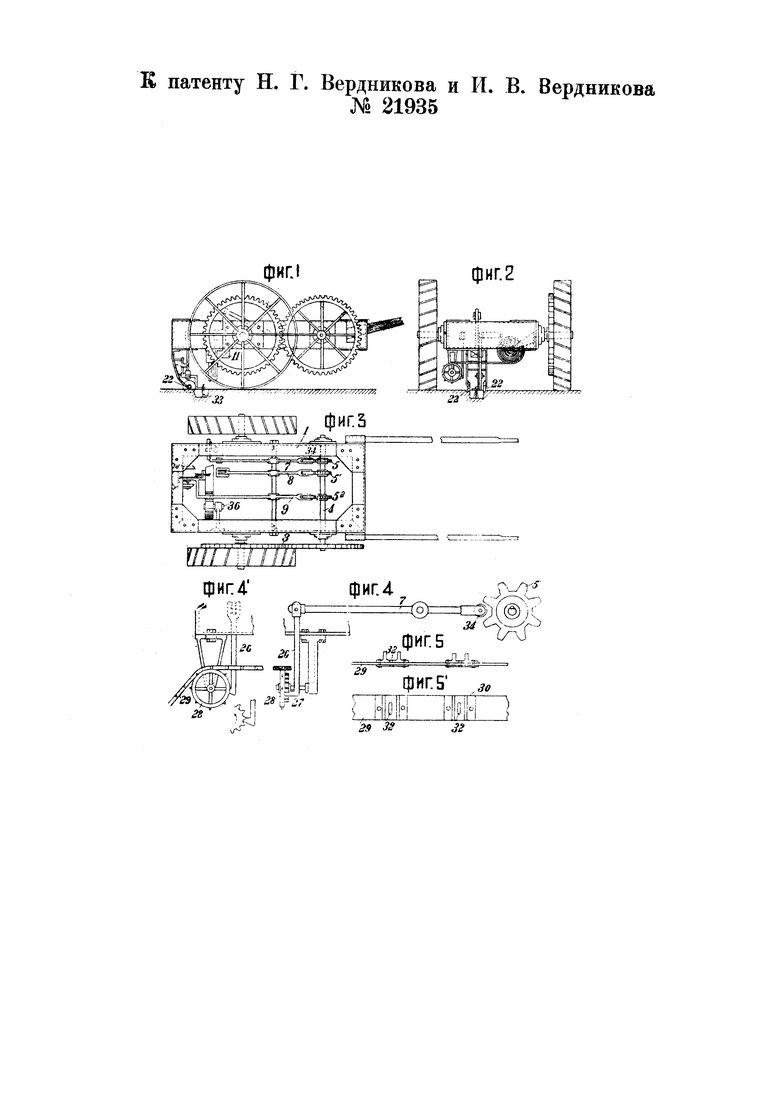
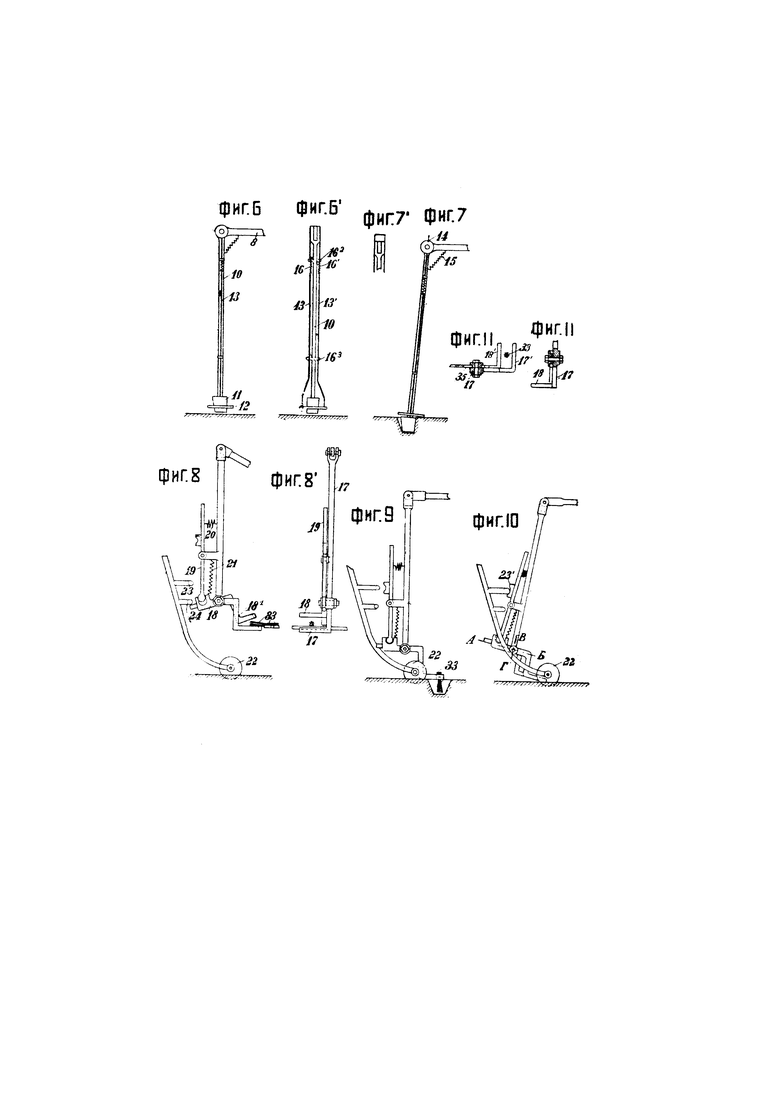
На чертеже фиг. 1 изображает вид машины сбоку; фиг. 2 - тоже, спереди; фиг. 3 - то же, сверху; фиг. 4 и 4′ - вид в двух проекциях сцепления ленточного транспортера с ведущей зубчаткой; фиг. 5 и 51 - вид в двух проекциях ленточного транспортера; фиг. 6, 61, 7 и 71 - штыковое приспособление для образования в почве углублений для растений; фиг. 8-10 щипцы, захватывающие растения; фиг. 11 - разрез по линии АБ на фиг. 10; фиг. 111 - разрез по линии ВГ на фиг. 10.
Предлагаемая машина для посадки растений состоит из установленных на одной общей раме тележки автоматически действующего штыкового приспособления для образования углублений в почве, посадочного аппарата для захватывания периодически раскрывающимися щипцами растений и для направления последних в почвенные углубления и транспортера для подачи растений к посадочному аппарату.
Штыковое приспособление выполнено в виде клина 11 (фиг. 6 и 7), установленного на штанге 10, шарнирно сочлененной с поворотным рычагом 8 (фиг. 6, 7 и 3), для отклонения которого с целью подъема клина служит кулачковая шайба 51 вала 4, приводимого во вращение от оси ходовых колес машины. Погружение клина 11 в почву производится действием его веса после соскакивания очередного кулачка шайбы при вращении ее в сторону, обратную направлению вращения ходовых колес. Шарнирное соединение штанги 10 с рычагом 8 предусмотрено с целью обеспечить возможность ее отклонения после погружения клина 11 в почву (фиг. 7). До этого же момента связь штанги и рычага остается жесткой, что достигается собачкой 14, западающей в гнездо головки рычага 8 под действием пружин 16, 161, установленных на несущих собачку 14 стержнях 13, 131, пропущенных через направляющие отверстия укрепленных на стержне 10 пластин 162, 163 и снабженных пластиной 12 с прорезом для клина 11. При погружении клина 11 в почву пластина 12, упираясь в последнюю, выводит из гнезда собачку 14, перемещаясь относительно стержня 10 против действия пружин 16, 161. Пружина 15 предназначена для приведения штанги 10 в ее нормальное относительно рычага 8 положение после выхода клина из почвы.
Для захватывания растений 33 (фиг. 8) с ленты 29 транспортера применены щипцы, одна часть которых, изогнутая в двух плоскостях (фиг. 8-11), составляет продолжение стержня 17, приводимого в колебательное движение поворотным рычагом 9 от кулака 52 вала 4, а другая часть 18, изогнутая соответственно первой, установлена на стержне 17 поворотно, сочленена шаровым шарниром с поворотным рычагом 19 и снабжена прорезом 35 (фиг. 11), допускающим смещение ее губки 181 относительно губки 171 другой части 17. В своем верхнем нерабочем положении губки щипцов разводятся в вертикальной плоскости неподвижным упором 24, поворачивающим часть 18 против действия пружины 21 (фиг. 8). При последующем опускании стержня 17 губка 181 поворачивается и захватывает подведенное транспортером растение 33, одновременно поворачивая его около губки 171 на 90° корнями вниз. Освобождение щипцов от растения после опускания его в лунку достигается при помощи упора 23 на стойке, обжимающего лунку катка 22. Под влиянием трения о почву стержень 17 отклоняется назад, упор 23 нажимает на выступ 231 рычага 19 и отводит против действия пружины 20 губку 181 от губки 171 на расстояние, допускаемое величиной прореза 35 (фиг. 10 и 11), при чем к этому моменту растение оказывается уже укрепленным в почве действием на последнюю двух катков 22 (фиг. 2 и 10). После этого стержень 17 поднимается, и щипцы приходят в свое первоначальное положение (фиг. 8).
Служащий для подачи растений транспортер выполнен в виде ленты 29 (фиг. 2, 4 и 5), надеваемой на валик 36 и снабженной гнездами 30 для растений и отверстиями 32 для сцепления с зубцами ведущего колеса 28, для приведения которого в согласованное с движением щипцов вращение служит действующая на храповик 27 собачка 26, управляемая в своем движении поворотным рычагом 7, сцепленным при помощи ролика 34 с кулачковой шайбой 5 вала 4 (фиг. 4). Лента 29 с предварительно заложенными растениями скатывается в рулон и устанавливается с возможностью вращения ее каркаса на тележке машины (фиг. 2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для посадки растений | 1930 |
|
SU26855A1 |
| Посадочная машина для древесных сеянцев | 1935 |
|
SU49565A1 |
| Машина для посадки растений | 1929 |
|
SU19383A1 |
| Посадочная машина | 1929 |
|
SU25781A1 |
| Машина для завертывания конфет | 1936 |
|
SU65206A1 |
| Приспособление к посадочным машинам для подачи растений | 1929 |
|
SU22372A1 |
| Машина для мытья, ополаскивания и сушки бутылок | 1927 |
|
SU25415A1 |
| ПОСАДОЧНАЯ МАШИНА | 1930 |
|
SU21565A1 |
| Машина для разрыхления и подравнивания щетины | 1940 |
|
SU60880A1 |
| Посадочная машина | 1932 |
|
SU29064A1 |
1. Машина для посадки растений, в которой для захватывания последних с транспортера, с целью перемещения их в углубления, образованные автоматически действующим клином в почве, применены щипцы, приводимые в вынужденное колебательное движение от оси ходовых колес машины, отличающаяся тем, что, с целью поворачивания растений 33 корнями вниз при захватывании их с транспортера щипцами, губка 181 последних установлена на поворотном рычаге 18 с некоторым радиальным смещением ее относительно укрепленной на подвижном стержне 17 губки 171, а для управления движением рычага 18 применены упоры 24 и 23, из которых первый служит для отклонения рычага против действия пружины 21, с целью разведения щипцов перед захватыванием ими растения, а второй - для поворачивания против действия пружины 20 рычага 19, с целью радиального перемещения рычага 18 в пределах прореза 35 после опускания удерживаемых щипцами растений в углубления, предварительно выдавленные в почве клином 11 (фиг. 6-11).
2. Форма выполнения указанной в п. 1 машины, отличающаяся тем, что, с целью устранения перемещения клина 11 в почве по ходу машины, он подвешен к ведущему рычагу 8 на шарнирной тяге 10, для жесткой связи которой с рычагом в период опускания клина в почву служит собачка 14, входящая в гнездо головки рычага 8 под действием пружин 16, 161, а для расцепления тяги 10 и рычага 8 применена соединенная с собачкой стержнями 13, 131 пластина 12, перемещаемая относительно тяги 10 реакцией поверхности почвы при погружении в последнюю клина (фиг. 6-7).
3. При указанной в п. 1 машине применение в качестве транспортера свернутой в рулон ленты 29, снабженной образующими гнездами для растений выступами 30 и отверстиями 32, предназначенными для сцепления ленты с ведущей зубчаткой 28 (фиг. 2, 4 и 5).
4. При указанной в п.п. 1 и 2 машине применение парных катков 22, предназначенных для осаживания почвы у растений перед освобождением последних щипцами (фиг. 1, 2, 9 и 10).
