Известны приводы лифта, включающие механизм перемещения кабины, выполненный в виде прикрепленных к обеим ее сторонам винтов и сцепляемых с ними роликов, закрепленных на стенках шахты.
Предложенный привод лифта отличается от известных тем, что винты механизма перемещения выполнены с рабочей поверхностью трапецеидальной формы, а ролики - с рабочей поверхностью конической формы.
Благодаря этому уменьи1аются силы трения, возникающие между взаимодействующими рабочими деталями механизма перемещения, и их износ.
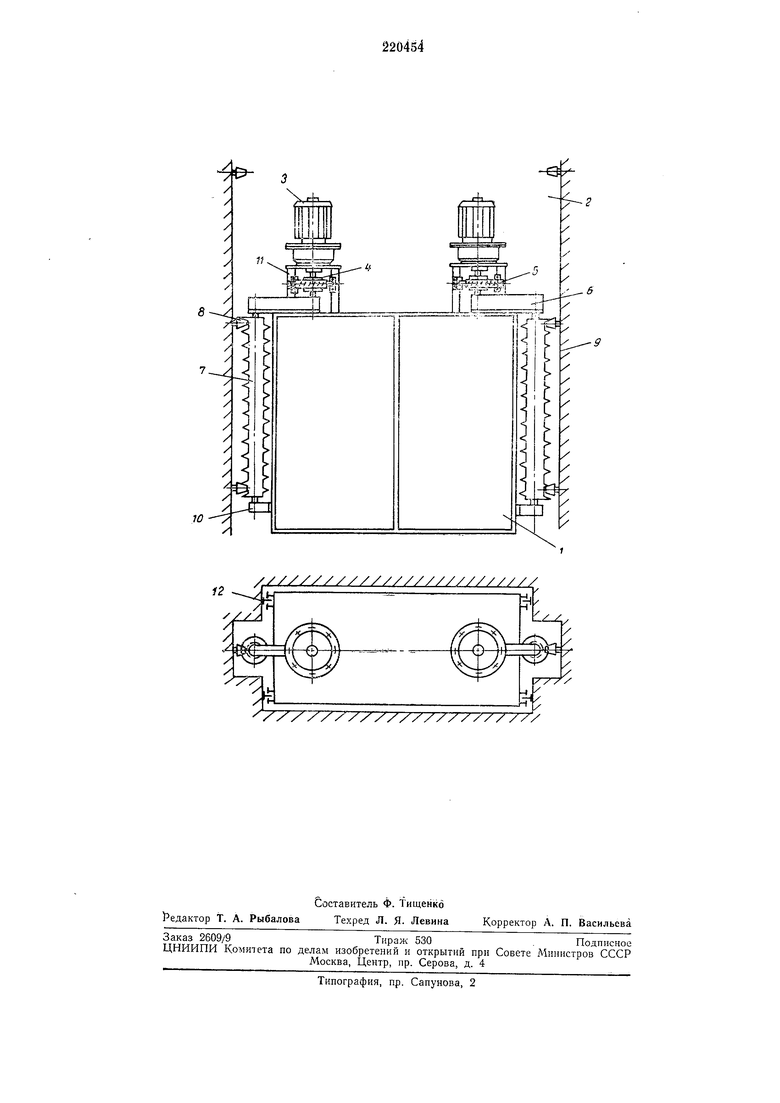
На чертеже схематически изображен описываемый привод.
Кабина / с расположенными на ней механизмами движется в шахте 2 лифта. РаспоЛожеииый на кабине механизм лифта состоит из двух мотор-редукторов 3, муфт 4, нормально замкнутых тормозов 5, зубчатых редукторов 6. Ведомые валы редукторов соединены с валами рабочих винтов 7, которые находятся в зацеплении с роликами 8, прикрепленными к стенке 9 шахты. Нижний конец вала рабочего винта находится в подшипнике 10, корпус которого прикреплен к кабине лифта. Мотор-редукторы установлены на крыше кабины с помощью металлических рам 11.
Электродвигатели мотор-редукторов имеют электрическую блокировку для синхронного запуска и синхронной остановки обоих двигателей. Эта блокировка исключает возможность включения одного двигателя и обеспечивает в случае остановки одного электродвигателя автоматическое отключение второго.
Для создания максимального и минимального износа кинематической пары винт-ролик рабочая поверхность ролика выполнена конической, а рабочая поверхность винта - трапецеидальной. Соприкосновение рабочих поверхностей винта и ролика происходит по
прямой линии. Окружные скорости точек рабочей поверхности винта пропорциональны их удалению от оси вращения. Наиболее удаленные от геометрической оси точки винта соприкасаются с точками, лежащими на рабочей
поверхности ролика на максимальном удалеНии от оси его вращения. Ближе расположенные к геометрической оси точки рабочей поверхности винта соприкасаются с точками на рабочей поверхности конического ролика, раснолол енными к его оси вращения. Вследствие этого все находящиеся в зацеплении точки винта и ролика, имеют равные окрулчные скорости. Поэтому при работе рабочего органа рабочая поверхность ролика
т. е. меладу рабочими поверхностями винта и ролика имеет место трение качения.
При включении электродвигателей моторредукторов автоматически размыкаются нормально замкнутые тормоза. Ведомые валы мотор-редукторов через муфты вращают ведущие валы редукторов, ведомые валы которых передают вращение рабочим винтам. Рабочие винты 7 при вращении входят в зацепление с роликами, и винты получают осевое перемещение. Так как винты укреплены на кабине, то вместе с ними получает осевое перемещение кабина относительно шахты лифта.
В кинематической паре винт - ролик винт находится в зацеплении не менее, чем с одним роликом. Расстояние между роликами выбирается так, чтобы, когда один ролик находится в зацеплении с последним витком винта, ролик полностью входит в зацепление с первым витком винта. При таком минимальном количестве роликов обеспечивается безопасная и плавная работа лифта. Устойчивое положение кабины при движении относительно шахты создается направляющими 12.
При выключении электродвигателей моторредукторов механизм лифта останавливается, тормоза автоматически замыкаются, и кабина
останавливается. Направление движения кабины изменяется за счет реверсирования электродвигателей мотор-редуктор. При изменении направления вращения электродвигателей мотор-редукторов меняется направление вращения винтов, а следовательно, и направление движения кабины. Оборудование на кабине расположено симметрично, вследствие этого она уравновешена.
Основные узлы механизма лифта мотор-редукторы, муфты, тормоза и редукторы серийно выпускаются промышленностью, что упрощает изготовление и эксплуатацию лифта.
Предмет изобретения
Привод лифта, включающий механизм перемещения кабины, выполненный в виде прикрепленных к обеим ее сторонам винтов и сцепляемых с ними роликов, прикрепленных
к стенкам шахты, отличающийся тем, что, с нелью обеспечения уменьшения сил трения, возникающих между взаимодействующими рабочими деталями механизма перемещения, и их износа, винты механизма перемещения выполнены с рабочей поверхностью трапецеидальной формы, а ролики - с рабочей поверхностью конической формы.
///////
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКАНАТНЫЙ ЛИФТ | 1966 |
|
SU214771A1 |
| ВАЛОПОВОРОТНОЕ УСТРОЙСТВО | 1990 |
|
RU2016210C1 |
| Лифт грузопассажирский рудничный | 2020 |
|
RU2784651C1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| УСТРОЙСТВО для ЗАТЯЖКИ и ОСВОБОЖДЕНИЯ КОНТАКТНЫХ ЗАЖИМОВ | 1973 |
|
SU390186A1 |
| ЛИФТ С НЕСКОЛЬКИМИ ПРИВОДНЫМИ ЛЕНТОЧНЫМИ БАРАБАНАМИ БЕЗ ПРОТИВОВЕСА И НИЖНИМ РАСПОЛОЖЕНИЕМ ПРИВОДА | 2000 |
|
RU2171218C1 |
| ЛИФТ | 1995 |
|
RU2091290C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| БЛОК КОНТРОЛЯ СКОРОСТИ И УСКОРЕНИЯ С УПРАВЛЯЕМЫМ ЭЛЕКТРОННЫМ СПОСОБОМ ПУСКОВЫМ СЕРВОМЕХАНИЗМОМ ДЛЯ ПРИМЕНЕНИЯ В ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВАХ | 2008 |
|
RU2472693C2 |