Известно устройство для контроля за правильным полетом челнока на ткацком станке, состоящее из системы датчиков, установленных на склизе батана и связанных посредством релейного блока с датчиком положения глазного вала, и исполнительного механизма, останавливающего станок. Регулируют скорость полета челнока в таком устройстве вручную.
Для автоматического устранения нарушений в полете челнока на ходу ткацкого станка предлагаемое устройство снабжено механизмом для регулирования силы боя челнока, выполненным в виде приводимого реверсивно во вращение посредством электромагнитов и храпового механизма ходового винта, изменяющего размах погонялкн с помощью рычага, установленного на гайке ходового винта.
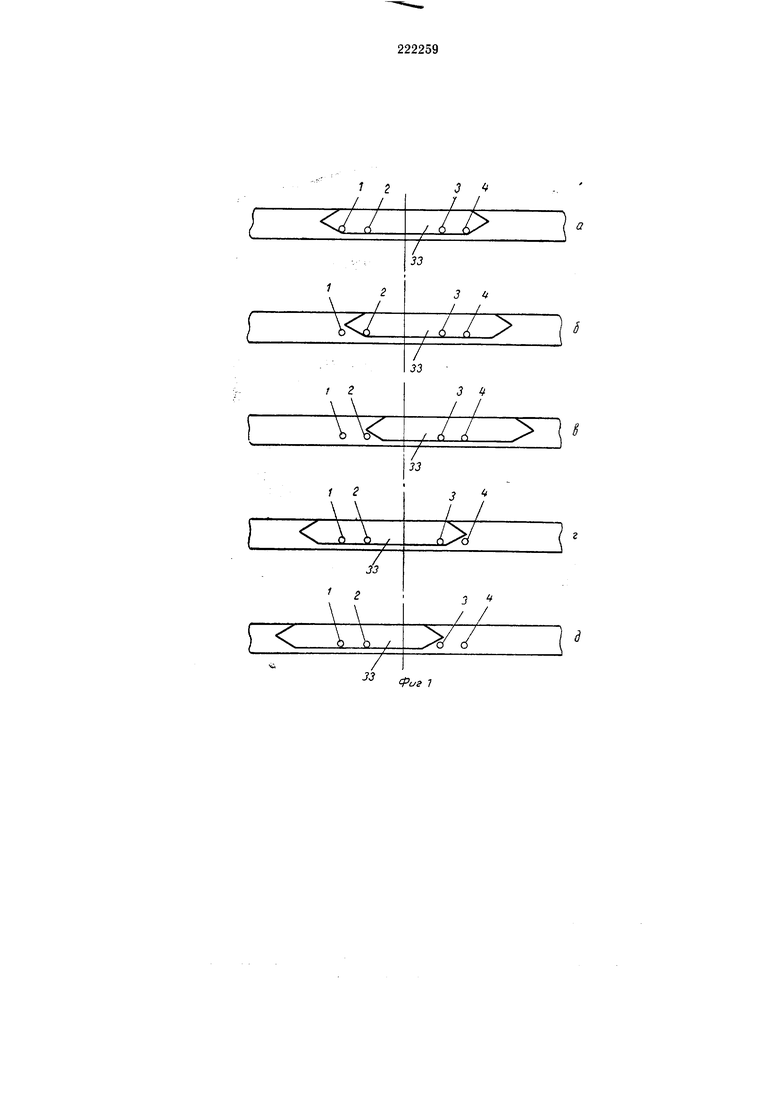
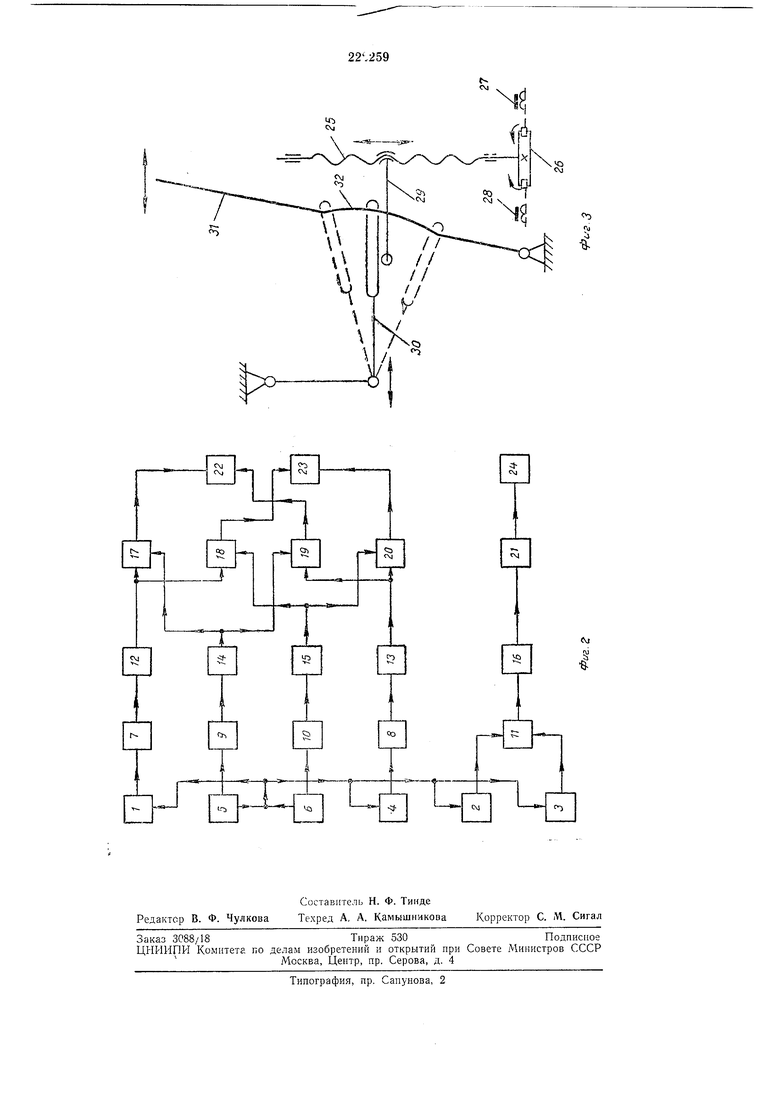
На фиг. 1 изображена система датчиков, установленных на склизе батана (положения а, б, в, г, д); на фиг. 2 - схема взаимодействия датчиков, релейного блока и исполнительных механизмов изменения силы боя; на фиг. 3- кинематическая схема механизма изменения силы боя.
Устройство включает четыре датчика /, 2, 3 и 4 контроля скорости челнока, для которы.х использованы фотодиоды, имеющие большое обратное сопротивление при затемнении и малое обратное сопротивление нри освещении.
Датчики вмонтнрованы в склиз батана (см. фиг. 1) по обе стороны от середины так, что они перекрываются передней стенкой челнока во время движения последнего. Освещаются
эти датчики специальным источником света. Датчики 1, 2, 3 и 4 связаны релейным блоком с датчика}.1и 5 и 6 положения главного вала станка (см. фиг. 2). В качестве датчиков 5 и 6 использованы индукционные датчики, установленные на раме ткацкого станка и связанные с его средним валом так, что при полете челиока слева иаправо в момент прихода батана в крайнее заднее положение электроимпульс дает датчик 5, а при обратном полете челнока
импульс посылает датчик 6. Поступающие сигналы проходят через усилители 7, 8, 9, 10 и 11 и одиовибраторы J2, 13, 14, 15 и 16, увеличивающие длительность сигналов, так как длительности импульсов, полученных от датчиков,
недостаточно для срабатывания электромагнитных реле. С одновибратора 12, преобразующего импульсы от датчика / контроля скорости челнока, сигналы подаются одновременно на первые входы элементов /7 н 18 совпадения
сигналов, а с одновибратора 13 от датчика 4- на первые входы элементов 19 и 20 совпадения сигналов. С одновибратора 14, преобразующего импульсы от датчика 5, с 1гналы подаются на вторые входы элементов 17 и 19 соьдатчика 6 - на вторые входы элементов 18 и 20. С одновибратора 16, преобразующего импульсы от датчиков 2 vi 3, сигналы передают на вход мощного усилителя 21.
Элементы совнадения сигналов имеют два входа - первый и второй - и один выход, через который подается сигнал на исполнительные механизмы 22 и 23 изменения силы боя только в том случае, если на оба его входа сигналы поданы одновременно. Если сигнал подан только на один из двух входов, элемент не срабатывает, и выходной сигнал отсутствует.
Исполнительный механизм 22 служит для изменения силы боя слева, а 23 - справа. От усилителя 21 подается сигнал на исполнительный механизм 24 останова станка.
Исполнительные механизмы 22 левый и 23 правый изменения силы боя установлены между кронштейнами погонялки и концами бруса батана. Каждый из них состоит нз ходового винта 25, вращающегося в шарикоподшипниках. На нижнем конце винта закреплена сдвоенная храповая шестерня 26, на которой косые зубья нанравлены в разные стороны. Против каждой храповой шестерни установлены электромагниты 27 и 28, на якорях которых установлены собачки, входящие в зацепление с храповой шестерней и поворачивающие ее. Электромагнит 27 вращает храповую шестерню и винт против часовой стрелки, а электромагнит 28 - по часовой стрелке. Винт 25 при вращении перемещается с помощью рычага25, установленного на гайке ходового винта 25. На рычаг 29 свободно посажен хомут 30 погонялки 31, причем для сохранения постоянного зазора между хомутом 30 и погонялкой 31 на последней закреплена сегментная накладка 32.
р зменяется сила боя путем перемещения хомута 30 вверх или вниз. В качестве исполпичсльного механнзма 24 останова станка служнт толкающий электромагнит (не показан), который при втягивании сердечника сбивает пусковую ручку станка.
Во время работы станка за каждый оборот главного вала, в момент прихода багана в крайнее заднее положение, подается импульс поочередно от датчиков 5 или 6 угла поворота главного вала и далее через усилитель 9 или 10, одповибраторы 14 и 15 на элементы 17-19 и 18-20 совпадення снгналов.
При технологически нормальной скорости полета челнока 33 (см. фиг. 1, положение а) все четыре датчика 1, 2, 3 и 4 перекрыты челноком н не вызовут обрабатывания усилителей, в результате чего на элементы 17-20 подается только по одному импульсу от датчиков 3 или 6 и, следовательно, элементы 17-20 не выдают сигнала на исполнительные механизмы 22 и 23. На исполнительный механизм 24 также сигнала не поступит.
При полете челнока 33 слева направо, при увеличении его скорости в допустимых пределах в момент прихода батана в заднее положение, датчик контроля скорости не будет перекрыт челноком (положение б), он будет освещен и передаст импульс через усилитель 7 и одновибратор 12 на элементы 17-18. Следовательно, па элемепт 17 поступят одновременно два сигнала от одновибраторов 12 и 14,
вследствие чего он сработает и передаст сигнал на исполнительный механизм 22, включив питание электромагнита 28, который втянег якорь. Последний с помощью собачки повернет храповую шестерню 26 и винт 25, рычаг
29 вместе с гайкой поднимет хомут 30 погонялки 31 и тем самым уменьшит силу боя и скорость челнока. На элемент 18 в это время поступит только один сигнал и он не сработает.
Аналогично сработает исполнительный механизм 23 при уменьшении скорости челнока, когда окажется не перекрытым челноком датчик 4, перемещаясь реверсивно. При увеличенни скорости челнока 33 в недопустимых пределах, в момент прихода батана в крайнее заднее положение, окажутся не перекрытым челноком два датчика 1 и 2 (положение в), а при уменьшении скорости в недопустимых нределах - не перекрытыми сразу
два датчика 3 и 4 (положение д). Оба эти положения относятся к аварийным. В этом случае сигналы пойдут на усилитель 11 и далее на мощный усилитель 21, который подает сигнал на исполнительный механизм 24 для
устранения дефекта в боевом механизме, вызвавшем отклонение скорости челнока в недопустимых пределах.
При отклонениях скорости челнока от технологически нормальной в допустимых пределах
команды на изменение силы боя будут подаваться за каждую нрокидку с данной стороны до тех пор, пока скорость челнока не достигнет технологически нормальной, и все четыре датчика 1, 2, 3 н 4 ке будут перекрыты челноком.
Предмет изобретения
Устройство для контроля за правильным полетом челнока на ткацком станке, состоящее
из системы датчиков, установленных на склизе батана и связанных посредством релейного блока с датчиком положепия главного вала, и исполнительного механизма, останавливающего станок, отличающееся тем, что, с целью автоматического устранения нарушений в полете челнока па ходу ткацкого станка, опо снабжено механизмом для регулирования силы боя челнока, выполненным в виде приводимого реверсивно во вращение посредством
электромагнитов и храпового механизма ходового винта, изменяющего размах погонялки с помощью рычага, установленного на гайке ходового винта.
о
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для КОНТРОЛЯ ЗА ПРАВИЛЬНЫМ ПОЛЕТОМ ЧЕЛНОКА НА ТКАЦКОМ СТАНКЕ | 1965 |
|
SU168205A1 |
| МЕХАНИЗМ ПРОКИДКИ ЧЕЛНОКА ТКАЦКОГО СТАНКА | 2013 |
|
RU2532020C1 |
| ТКАЦКИЙ СТАНОК | 1971 |
|
SU303379A1 |
| Амортизатор челнока автоматического ткацкого станка | 1957 |
|
SU111687A1 |
| Устройство для затормаживания челнока в челночной коробке ткацкого станка | 1937 |
|
SU52243A1 |
| Ткацкий станок с зажимными челноками и зажимной челнок | 1989 |
|
SU1777614A3 |
| ТКАЦКИЙ СТАНОК | 1930 |
|
SU23889A1 |
| Двухвальный ткацкий станок | 1930 |
|
SU38500A1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОБРЫВА УТОЧНОЙ нити НА ТКАЦКОМ СТАНКЕ | 1973 |
|
SU386039A1 |
| Ткацкий станок | 1935 |
|
SU51261A1 |
fj
