Известны устройства для определения динамической неуравновешенности роторов, выполненные в виде избирательного усилителя, питаемого электрическими сигналами датчиков, с определением величины дисбаланса по амплитуде сигнала и места дисбаланса по фазе сигнала. На выходе этих устройств при изменении скорости вращения ротора и, следовательно, частоты измеряемого сигнала возникает погрешность в определении места неуравновешенности.
Предложенное устройство отличается тем, что оно снабжено корректирующим блоком, содержащим два смесителя, генератор синусоидальных колебаний с частотой, большей, чем частота измеряемого сигнала, но меньшей, чем удвоенная частота сигнала, и два канала с резонансными фильтрами. Причем один канал настроен на частоту, равную разности частоты генератора и измеряемого сигнала, а второй - на частоту, равную разности удвоенной частоты сигнала и частоты генератора.
Это отличие позволяет точно определять место неуравновешенности на роторе в случае, когда его скорость вращения отклоняется от номинальной либо не поддерживается постоянной.
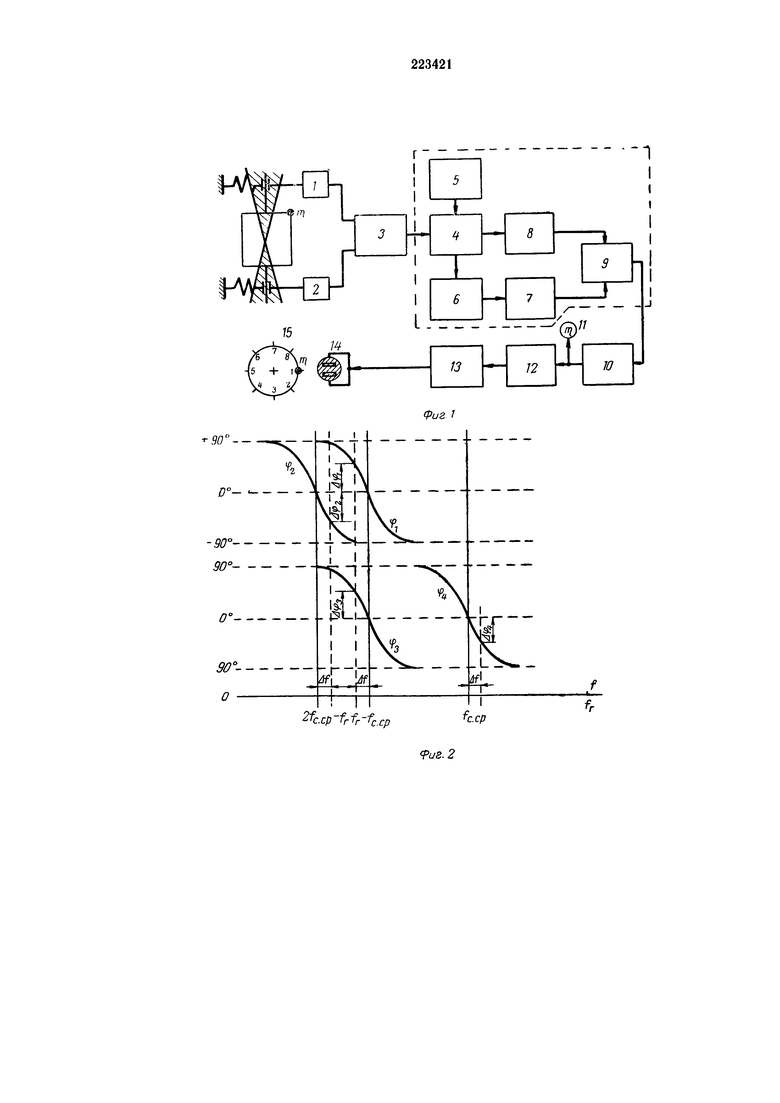
На фиг. 1 изображена блок-схема предложенного устройства; на фиг. 2 - частотно-фазовые характеристики резонансных фильтров измерительной схемы.
На фиг. 2 приняты следующие обозначения:
fc -частота измеряемого сигнала;
Δf - изменение частоты сигнала;
fс.ср -средняя частота сигнала;
fг - частота генератора синусодиальных колебаний;
φ1-φ4 - частотно-фазовые характеристики фильтров соответственно 6, 8, 7 и 10.
Описываемое устройство работает следующим образом.
Сигналы с датчиков 1 и 2 суммируются в блоке 3. Суммарный сигнал с частотой fс поступает на смеситель 4, на который также подается сигнал с частотой fг от генератора 5 синусоидальных колебаний.
После смесителя резонансный фильтр 6 выделяет частоту промежуточного сигнала, равную разности φг-φс. Последовательно с фильтром 6 включен фильтр 7, настроенный на эту же частоту. Сигнал со смесителя 4 поступает на фильтр 8, настроенный на частоту, равную разности двух частот 2fс-fг, т.е. разности удвоенной частоты сигнала и частоты сигнала генератора 5 синусоидальных колебаний.
Сигнал с фильтров 7 и 8 поступает на смеситель 9 и через фильтр 10, настроенный на частоту fc измеряемого сигнала, подается на стрелочный прибор и ограничитель 12. Ограничитель формирует импульс, который, пройдя через усилитель 13, поджигает импульсную лампу 14. Последняя освещает шкалу 15 на роторе. Видимое положение шкалы 15 не меняется при изменении скорости вращения ротора, так как измерительное устройство не меняет фазы сигнала.
По частотно-фазовым характеристикам видно, что для компенсации фазовой погрешности необходимо выполнить условие:
Δφ1+Δφ2+Δφ3+Δφ4=0
или Δφ1+Δφ2=0 и Δφ3+Δφ4=0,
т.е. чтобы суммарный сдвиг по фазе, вносимый фильтрами, равнялся нулю.
Выполнение этих условий достигается соответствующим подбором характеристик фильтров, а также подбором соотношения частоты fc сигнала и частоты fг генератора синусоидальных колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2009 |
|
RU2423730C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2402787C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2426145C2 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2378138C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2000 |
|
RU2172968C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2008 |
|
RU2363614C1 |
| ИЗМЕРИТЕЛЬ РАССТРОЙКИ СВЧ-РЕЗОНАТОРА | 1991 |
|
RU2014623C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2448017C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408881C1 |
Устройство для определения динамической неуравновешенности роторов, выполненное в виде избирательного усилителя, питаемого электрическими сигналами датчиков, с определением величины дисбаланса по амплитуде сигнала и места дисбаланса по фазе сигнала, отличающееся тем, что, с целью устранения погрешности в определении места неуравновешенности, вызываемой изменением фазы сигнала в зависимости от изменения скорости вращения ротора, оно снабжено корректирующим блоком, содержащим два смесителя, генератор синусоидальных колебаний с частотой, большей, чем частота измеряемого сигнала, но меньшей, чем удвоенная частота сигнала, и два канала с резонансными фильтрами, настроенными соответственно: первый - на частоту, равную разности частоты генератора и частоты измеряемого сигнала, а второй - на частоту, равную разности удвоенной частоты измеряемого сигнала и частоты генератора.
