Изобретение касается машин для посадки растений, в которых для перемещения растений в почву служат полые, установленные на бесконечной цепи, сошники, с перекрывающими их устье поворотными клапанами, управляемыми совокупным действием кулака и пружины, и с применением для подачи в сошники растений ленточных транспортеров.
В предлагаемой машине на сошниках установлены колпачки, предназначаемые для уплотнения почвы и образования лунок около растений.
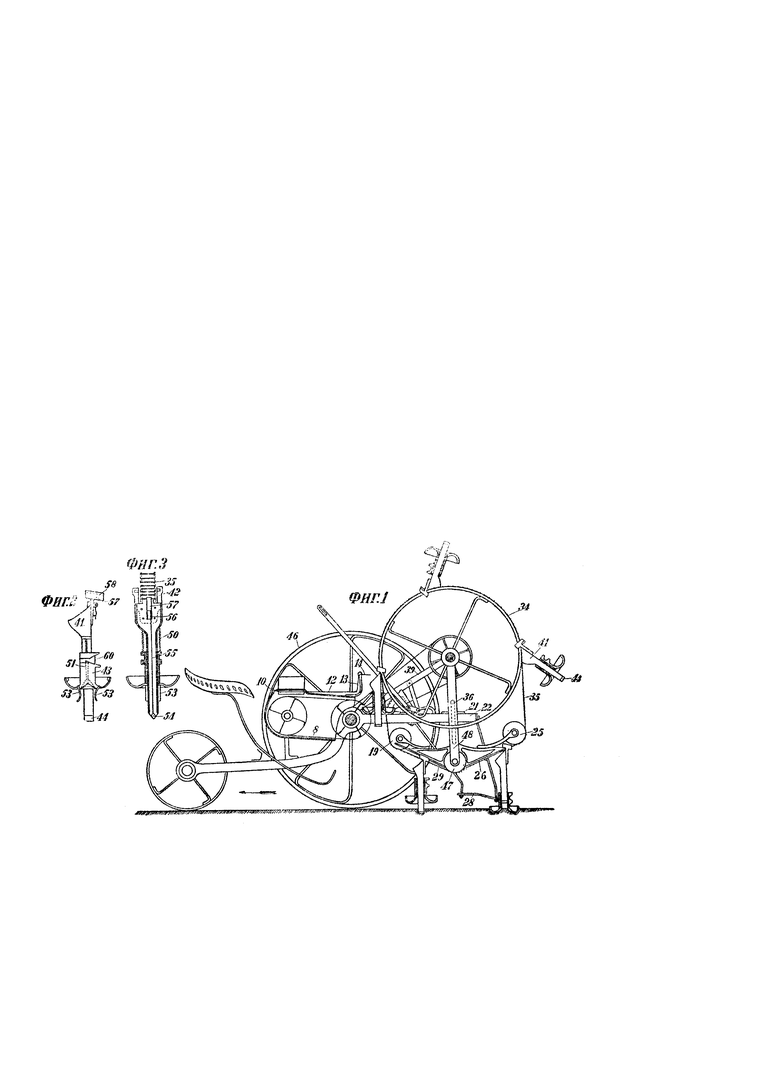
На схематическом чертеже фиг. 1 изображает боковой вид машины с частичным разрезом; фиг. 2 и 3 - деталь полого сошника в двух проекциях.
В предлагаемой посадочной машине рабочий аппарат выполнен в виде системы трубчатых сошников 41, подвешенных на цепи 35 и огибающих ролики 19, 47, 25 и колесо 34 и приводимых во вращение от оси ходовых колес 46 со скоростью, равной скорости поступательного перемещения машины, но в обратном направлении, так что скорость движения сошников относительно почвы в момент посадки равна нулю.
К верхней части сошника прикреплена вилка 42 (фиг. 2 и 3), пазы 58 которой предназначены для пропуска направляющей 29 (фиг. 1) с целью сообщения сошнику устойчивого вертикального положения при вхождении его в почву. Внутри сошника находятся поворотные клапаны 44, для поворачивания которых, с целью выпуска из полости сошника растений, служат рычажки 54 и стержень 55, приводимый в движение неподвижной направляющей 26, действующей на его головку 57 при выгружении сошника из почвы, и совершающий обратный ход под действием пружин 56. На сошнике с возможностью осевого перемещения под действием входящей в его пазы 60 неподвижной направляющей 28 и пружин 50 (обратный ход) помещен колпачок 43, предназначенный для уплотнения почвы около растений с образованием около последних лунки. На колпачке 43, кроме того, имеются поворотные пальцы 53, разводимые при опускании колпачка действием направляющей 28 на выступ стержня 51.
Автоматическая подача растений с поворотной полочки 10, на которую они закладываются вручную по одному, на ленточный транспортер 8 производится системой рычагов 12, 13, 14, служащих для опрокидывания полочки при зацеплении сошников за рычаг 14.
Возможность регулирования глубины посадки растений обеспечивается установкой оси ведущего колеса 34 на поворотном плече 39, а вертикальной подвески 48 - на брусе 22 при помощи взаимно-перпендикулярных параллелей 21 и 36.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для посадки растений | 1930 |
|
SU21934A1 |
| МАШИНА ДЛЯ ПОСАДКИ РАСТЕНИЙ | 1929 |
|
SU21935A1 |
| МАШИНА ДЛЯ ПОСАДКИ РАСТЕНИЙ | 1929 |
|
SU23003A1 |
| Машина для посадки маточной свеклы | 1931 |
|
SU27239A1 |
| Машина для посадки растений | 1929 |
|
SU19847A1 |
| Посадочная машина | 1931 |
|
SU28704A1 |
| Машина для посадки растений | 1929 |
|
SU19383A1 |
| Посадочная машина для древесных сеянцев | 1935 |
|
SU49565A1 |
| Посадочная машина | 1932 |
|
SU29064A1 |
| ПОСАДОЧНАЯ МАШИНА | 1930 |
|
SU21565A1 |
1. Машина для посадки растений с подвешенными на бесконечной цепи полыми сошниками, снабженными перекрывающими их устье поворотными клапанами, отличающаяся тем, что на сошниках 41 установлены с возможностью их осевого перемещения колпачки 43, предназначенные для уплотнения почвы и образования лунок около растений под действием неподвижной направляющей 28, входящей при выгружении сошников из почвы в пазы 60 втулки колпачка, а для обратного перемещения последних применены пружины 50.
2. Форма выполнения указанной в п. 1 машины, отличающаяся тем, что, с целью сообщения устойчивого вертикального положения сошникам при погружении их в почву, применена неподвижная направляющая 29, служащая для взаимодействия с пазами 58 вилки 42 сошника, а для поворачивания клапанов 44, с целью выпуска растений из полости сошника при выгружении последнего из почвы, служит неподвижная направляющая 26, предназначенная для отжимания против действия пружин 56 головки 57 сочлененного с клапанами стержня 55.
3. Машина, указанная в п.п. 1 и 2, с применением ленточного транспортера для подачи растений в сошники, отличающаяся тем, что над транспортером 8 установлена полка 10, для автоматического поворачивания которой, с целью сбрасывания на транспортер накладываемого на нее вручную растения, применена система рычагов 12, 13, приводимых в действие рычагом 14 при сцеплении последнего с проходящими мимо него сошниками.
4. Форма выполнения указанной в п.п. 1-2 машины, отличающаяся тем, что с целью возможности регулирования глубины посадки растений, ось ведущего цепь 35 колеса 34 установлена на плече 39, поворотном около оси ходовых колес 46, а поддерживающая опоры роликов 19, 47 и 25 подвеска 48 сочленена с брусом 22 рамы машины при помощи взаимно-перпендикулярных параллелей 21 и 36.
