Известны механизмы свободного хода, состоящие из обоймы, звездочки и роликов. При вертикальном положении такого механизма под действием силы веса ролики прижимаются к щечкам, и возникающие силы трения перекашивают ролик, что ухудшает условия работы механизма.
Кроме того, в известных механизмах свободного хода не всегда можно увеличить число роликов для повышения нагрузочной способности.
В предлагаемом механизме эти недостатки устранены. Механизм содержит два ряда конических роликов для повышения нагрузочной способности. Обойма выполнена в виде двух соединенных между собой конусов, а звездочка - в виде кольца с наклонными радиальными пазами на торцах. При вертикальном расположении предлагаемый МСХ нормально работает, так как под действием силы веса ролики не перекашиваются. Звездочку легко выполнить плавающей для равномерного распределения нагрузки между роликами.
Использование конических роликов, закрепленных в сепараторе, устраняет геометрическое скольжение, а следовательно, износ и потери на трение.
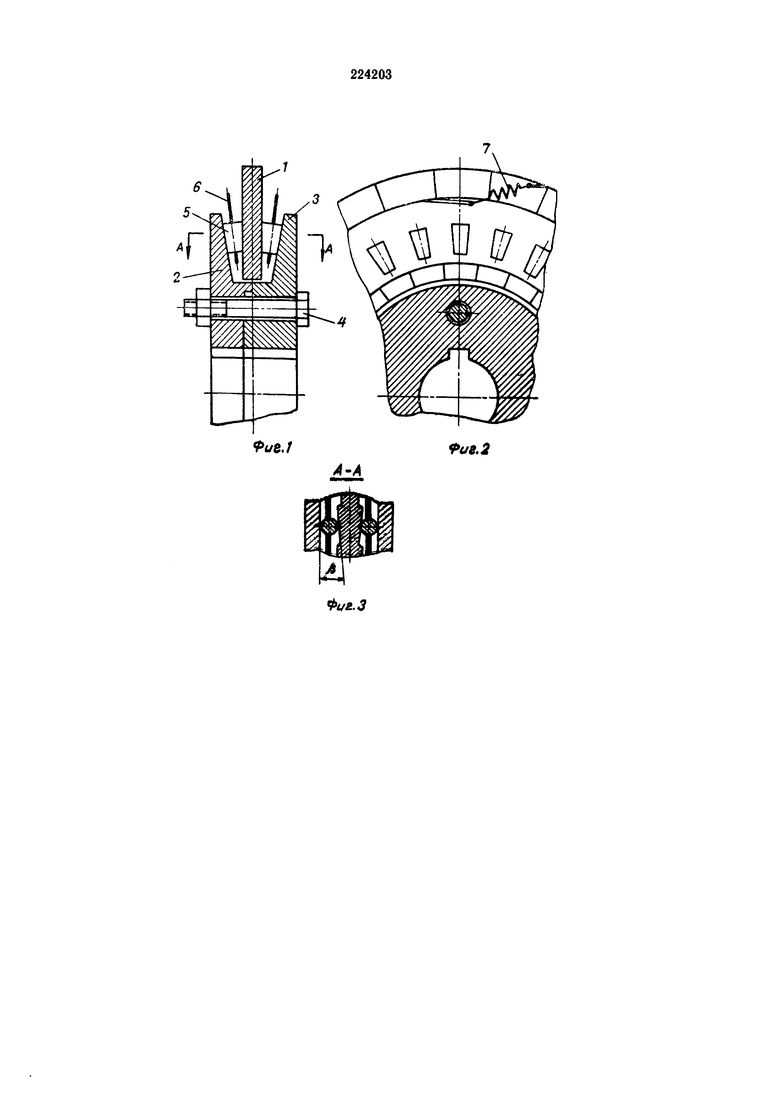
На фиг. 1 изображен механизм свободного хода, в продольном разрезе; на фиг. 2 - то же в поперечном разрезе; на фиг 3 - то же, сечение по А-А фиг. 1.
Предлагаемый МСХ включает в себя звездочку 1, выполненную в виде кольца, на торцах которого имеются наклонные радиальные пазы, являющиеся рабочей поверхностью, и обойму, состоящую из двух конусов 2 и 3. Так как описываемый МСХ осевого действия, то конуса 2 и 3 стягиваются болтами 4.
Между звездочкой 1 и конусами 2 и 3 обоймы расположены конические ролики 5, закрепленные в гнездах сепаратора 6, представляющего собой конус. Сепаратор 6 связан со звездочкой 1 при помощи пружин растяжения 7.
Известно, что МСХ заклинивается при α≤2ρ, где α - угол заклинивания; ρ - угол трения.
В предлагаемом МСХ звездочка в сечении представляет двойной клин и угол заклинивания между обоймой и звездочкой равен  .
.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1991 |
|
RU2013677C1 |
| Механизм свободного хода | 1976 |
|
SU625072A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2005 |
|
RU2297559C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU432310A1 |
| РОЛИКОВАЯ МУФТА СВОБОДНОГО ХОДА | 2002 |
|
RU2224923C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2004 |
|
RU2279001C1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ | 2003 |
|
RU2238459C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| МЕХАНИЗМ СВОБОДНОГО ХОДАВС'-Ссn^iiH:iiOБ!-'! 5/.: | 1971 |
|
SU308249A1 |
Механизм свободного хода, состоящий из обоймы, звездочки и роликов, отличающийся тем, что, с целью повышения нагрузочной способности механизма и возможности его использования при вертикальном расположении, обойма выполнена в виде двух соединенных между собой конусов, а звездочка - в виде кольца с наклонными радиальными пазами на торцах, при этом ролики имеют коническую форму и помещены в сепаратор.
