Известны поляризованные электромеханические преобразователи, содержащие магнитопроводы, якорь, индукционные катушки, охватывающие якорь и расположенные между магнитопроводами.
Предложенный преобразователь отличается тем, что в нем якорь выполнен в виде креста, две противоположные консоли которого расположены внутри индукционных катушек, а две другие - между индукционными катушками.
Это уменьшает время срабатывания преобразователя.
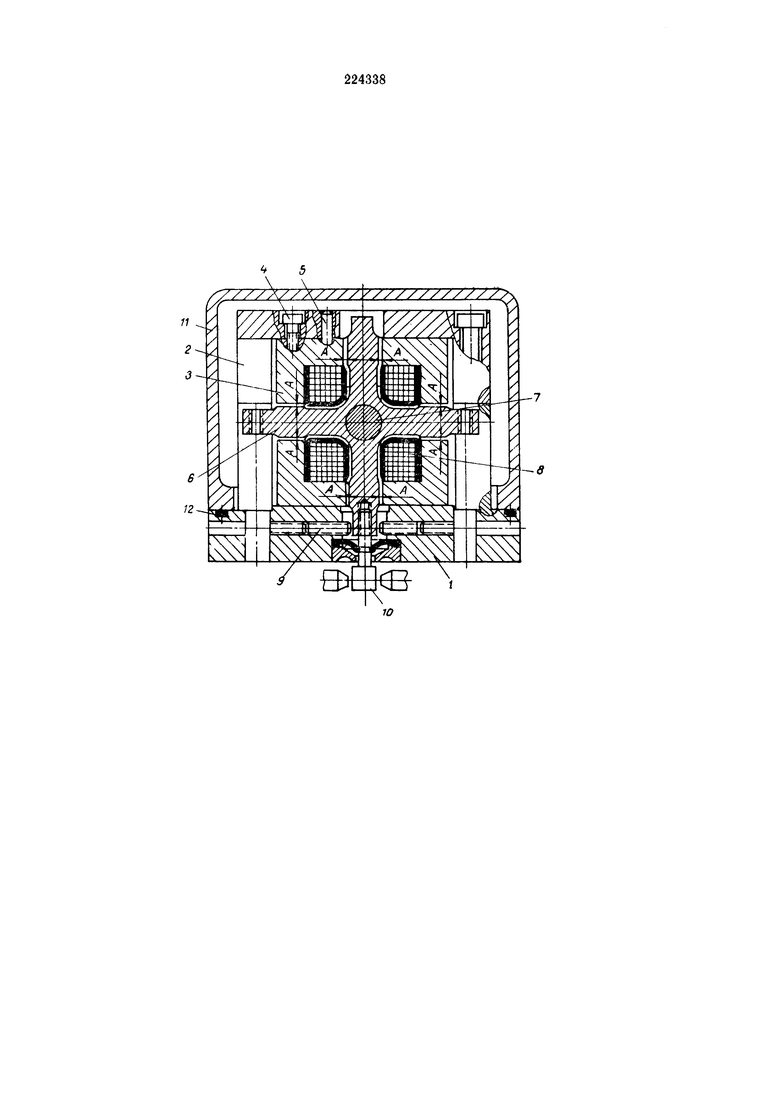
На чертеже показан поляризованный электромеханический преобразователь, вертикальный разрез.
Он содержит корпус 1, к которому крепится крышка 2; магнитопроводы 3, прикрепленные к корпусу 1 и крышке 2 винтами 4 и штифтами 5; крестообразный якорь 6, припаянный к торсиону 7, и две индукционные катушки 8.
В корпусе 1 расположено два регулируемых упора 9, ограничивающих ход якоря 6. К магнитопроводам 3 крепятся четыре постоянных магнита (на чертеже не показаны) таким образом, что одноименные полюса постоянных магнитов расположены диаметрально противоположно относительно оси вращения якоря 6.
Катушки 8 охватываются магнитопроводами 3, а внутри катушек и между ними расположены консоли якоря 6.
Рабочие концы консолей якоря 6, находящегося в среднем положении, образуют восемь равных зазоров А с рабочими торцами полюсов магнитопроводов 3. Для работы преобразователя с управляющим элементом типа сопло-заслонка в торец одной из консолей якоря 6 ввертывается заслонка 10. Кожух 11 крепится к корпусу 1 так, что он зажимает уплотнительное кольцо 12. Таким образом, внутренняя полость преобразователя герметична.
При подаче электрического сигнала в катушки 8 в воздушных зазорах А в результате взаимодействия двух магнитных потоков, поляризующего, создаваемого постоянными магнитами, и управляющего, создаваемого катушками 8, возникает электромагнитная сила, которая перемещает якорь 6.
В пределах рабочего хода якоря 6 каждому значению входного электрического сигнала соответствует определенное положение якоря, причем момент на нем уравновешивается внутренними упругими силами торсиона 7. При перемене направления тока в катушках 8 изменяется и направление вращения якоря 6. Наличие упоров 9 улучшает коэффициент возврата якоря 6 при его максимальных отклонениях от среднего положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический преобразователь | 1972 |
|
SU444253A1 |
| ДВУХСТОРОННИЙ ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ С ПАССИВНЫМ УДЕРЖАНИЕМ ШТОКА | 2016 |
|
RU2634423C1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ С ПАССИВНЫМ УДЕРЖАНИЕМ ШТОКА | 2016 |
|
RU2634424C1 |
| Поляризованный электромагнитный излучатель | 1990 |
|
SU1716624A1 |
| Поляризованный электромеханический преобразователь | 1972 |
|
SU479891A1 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2276771C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| Электропневматический аналоговыйпРЕОбРАзОВАТЕль | 1978 |
|
SU808728A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2004 |
|
RU2298243C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |
Поляризованный электромеханический преобразователь электрического сигнала в перемещение, содержащий магнитопроводы, якорь, две индукционные катушки, охватывающие якорь и расположенные между магнитопроводами, отличающийся тем, что, с целью уменьшения времени срабатывания, в нем якорь выполнен в виде креста, две противоположные консоли которого расположены внутри индукционных катушек, а две другие - между индукционными катушками.
