Электромеханический преобразователь для электропривода вертикального перемещения регулирующего органа (далее электромеханический преобразователь) относится к электротехнике и может быть использован в системах автоматического управления положением и перемещением регулирующего органа ядерного реактора.
Известен электропривод, содержащий синхронную машину (шаговый двигатель) с многофазной обмоткой якоря на статоре и постоянными магнитами на роторе, и механическое устройство, предназначенное для передачи вращающего момента от веса регулирующего органа на вал ротора синхронной машины (см. а.с. СССР №350104. Открытия. Изобретения. 1972, №26).
Это устройство способно воспринимать момент от веса регулирующего органа в вертикальном направлении, например, посредством блока, закрепленного на валу ротора и перекинутого через блок троса, прикрепленного к регулирующему органу, или зубчатой рейки и реечной шестерни, и перемещать его в вертикальном направлении. Движение вверх осуществляется в двигательном режиме работы синхронной машины, а вниз - в двигательном или в генераторном режимах работы. Для ограничения скорости опускания регулирующего органа в этом устройстве применено динамическое торможение на емкостную нагрузку, подключенную к выводам несмежных фаз обмотки якоря синхронной машины.
Недостатком этого электропривода является невысокая надежность, так как в случае пробоя хотя бы одного конденсатора фазы обмотки якоря синхронной машины оказываются замкнутыми между собой накоротко, и она теряет работоспособность.
Известен также электропривод, содержащий синхронную машину с многофазной обмоткой якоря на статоре, снабженной выводами эквипотенциальных точек параллельных ветвей для подключения к источнику переменного напряжения или тока и зажимами для подключения конденсаторов в одной или нескольких фазах, и ротором, на валу которого установлены зубчатый магнитопровод и магнитоэлектрический индуктор (см. А.с. СССР №1454208 МПК7 H02K 37/00. 1999 г., Бюл. №32, II ч.).
Работа в генераторном режиме обеспечивается благодаря использованию постоянных магнитов на роторе и обмотки якоря и подключению конденсаторов к эквипотенциальным точкам параллельных ветвей в фазах обмотки якоря. Эквипотенциальные точки параллельных ветвей в фазах образованы в результате подключения к источнику одной ветви - началом катушки, а другой ветви - концом катушки. Благодаря такому решению повышается надежность электропривода, поскольку выход из строя (пробой) конденсаторов не влечет за собой потерю работоспособности синхронной машины.
Недостатками известного устройства являются ухудшенные массогабаритные показатели, из-за наличия на роторе синхронной машины значительного объема постоянных магнитов, которые в двигательном режиме работы в создании вращающего электромагнитного момента участия не принимают.
Наиболее близким к предлагаемому техническому решению является электропривод для вертикального перемещения регулирующего органа на базе синхронной (реактивной) машины, который содержит синхронную машину с многофазной обмоткой якоря на статоре, внутри которого расположен ротор с жестко закрепленными на его валу зубчатым магнитопроводом и постоянными магнитами, смещенными относительно зубчатого магнитопровода в аксиальном направлении (см. патент РФ №2412519 МПК H02K 19/24, H02K 19/22, H02K 1/06. 2011 г., бюл. №5).
Благодаря самовозбуждению в генераторном режиме, достигаемому при определенном соединении катушек в параллельных ветвях соотношении активного сопротивления и индуктивных параметров обмотки, а также подключению емкостной нагрузки, синхронная машина данного электропривода способна развивать тормозной электромагнитный момент, компенсирующий момент от веса регулирующего органа, приложенного к валу ротора. Этот момент ограничивает скорость перемещения регулирующего органа вниз до установившегося значения.
Однако применение этого электропривода возможно только при относительно низких частотах вращения ротора и соответствующих им низких скоростях опускания регулирующего органа под действием собственного веса поскольку установившаяся частота вращения ротора, на которой происходит уравновешивание момента от веса регулирующего органа должна быть ниже частоты резонанса напряжений в цепи фаз обмотки, замкнутых конденсаторами, а эта частота не может быть высокой в силу следующих причин:
1) ротор синхронной машины вращается со скоростью в Z (Z - число зубцов на роторе) раз меньшей, чем частота вращения поля и напряжения в фазах синхронной машины,
2) высокая индуктивность фаз обмотки якоря, обусловленная наличием зубчатого магнитопровода на роторе, снижает частоту резонанса
где L - индуктивность фазы обмотки якоря синхронной машины, С - емкость нагрузки, подключенной к ее зажимам, на которой имеет место максимум электромагнитного момента, развиваемого синхронной машиной в генераторном режиме.
Выше этой частоты (с учетом передаточного отношения редуктора и электромагнитной редукции частоты вращения ротора относительно поля в Z раз) ротор не может разогнаться, особенно при относительно небольших массах регулирующего органа в приводах, выполняющих функции автоматического регулирования. Низкая частота опускания регулирующего органа ограничивает быстродействие устройства, что влечет за собой снижение безопасность эксплуатации энергетической установки. Кроме того, для определения фактического положения регулирующего органа известное устройство нуждается в первичных датчиках положения, в качестве которых наиболее часто применяют отдельно расположенные датчики индуктивного типа или на герметизированных контактах. Их размещение приводит к усложнению конструкции механизма.
Целью изобретения является повышение надежности и расширение функциональных возможностей.
Техническим результатом является разработка электромеханического преобразователя с повышенной надежностью работы электропривода за счет увеличения скорости опускания регулирующего органа при обесточивании синхронной машины и увеличения максимума тормозного момента на скорости, превышающей частоту, соответствующую заданной скорости равномерного опускания регулирующего органа, а также расширенными функциональными возможностями электропривода за счет выполнения функции первичного датчика для определения положения регулирующего органа.
Технический результат достигается тем, что в заявляемом электромеханическом преобразователе, содержащем синхронную машину с многофазной обмоткой якоря на статоре, внутри которого расположен ротор с жестко закрепленными на его валу зубчатым магнитопроводом и постоянными магнитами, смещенными относительно зубчатого магнитопровода в аксиальном направлении, образующими по окружности полюса чередующейся полярности, снабженной зажимами для подключения конденсаторов, и преобразователь движения, предназначенный для передачи вращающего момента от веса регулирующего органа на вал ротора синхронной машины, имеется статор синхронной машины, снабженный дополнительным магнитопроводом с обмоткой, соединенной с зажимами для подключения конденсаторов в одной или нескольких фазах, при этом дополнительный магнитопровод охватывает постоянные магниты на роторе, причем требуемая установившаяся частота вращения ротора под действием веса регулирующего органа при обесточенной многофазной обмотке якоря составляет менее  оборотов в минуту, где p - число пар полюсов обмотки дополнительного магнитопровода, L и С - индуктивность одной фазы обмотки и емкость подключенных к ее зажимам конденсаторов; кроме того, электромеханический преобразователь может быть оснащен обмоткой дополнительного магнитопровода с зажимами для подключения компаратора в одной или нескольких фазах.
оборотов в минуту, где p - число пар полюсов обмотки дополнительного магнитопровода, L и С - индуктивность одной фазы обмотки и емкость подключенных к ее зажимам конденсаторов; кроме того, электромеханический преобразователь может быть оснащен обмоткой дополнительного магнитопровода с зажимами для подключения компаратора в одной или нескольких фазах.
Исходя из изложенной сущности изобретения, его отличительными признаками являются:
1) наличие дополнительного магнитопровода с обмоткой на статоре, который охватывает постоянные магниты на роторе;
2) соединение обмотки дополнительного магнитопровода с зажимами для подключения конденсаторов в одной или нескольких фазах;
3) значение установившейся частоты вращения ротора, которую необходимо обеспечить при опускании регулирующего органа под действием собственного веса при обесточенном двигателе, составляющее менее  оборотов в минуту, где p - число пар полюсов обмотки дополнительного магнитопровода, L и С - индуктивность одной фазы обмотки и емкость подключенных к ее зажимам конденсаторов.
оборотов в минуту, где p - число пар полюсов обмотки дополнительного магнитопровода, L и С - индуктивность одной фазы обмотки и емкость подключенных к ее зажимам конденсаторов.
По первому признаку известны бесконтактные двигатели, снабженные датчиком электромагнитного типа. Ротор датчика содержит постоянные магниты, которые смещены относительно ротора двигателя в аксиальном направлении и охвачены дополнительным магнитопроводом статора с обмоткой (см. Юферов Ф.М. Электрические машины автоматических устройств: учебник для ВУЗов. М.: Высшая школа, 1988, 479 с, с. 225, рис. 7.11).
Однако электромагнитный момент от действия постоянных магнитов в датчике данного устройства пренебрежимо мал по сравнению с электромагнитным моментом самого двигателя и не оказывает влияние на движение привода. В предлагаемом же устройстве магниты на роторе во взаимодействии с обмоткой дополнительного магнитопровода используются для ограничения частоты вращения ротора, вращающегося под действием приложенного к нему внешнего момента нагрузки, момент от этого взаимодействия должен быть достаточно большим, чтобы превышать таковой от веса регулирующего органа на валу ротора двигателя.
Использование известных признаков в настоящем техническом решении позволяет получить новое качество, а именно повысить надежность электропривода для вертикального перемещения регулирующего органа за счет увеличения установившейся скорости опускания регулирующего органа при обесточивании синхронной машины и более эффективного ее ограничения при нарастании скорости сверх установившегося значения.
Сущность изобретения поясняется чертежами:
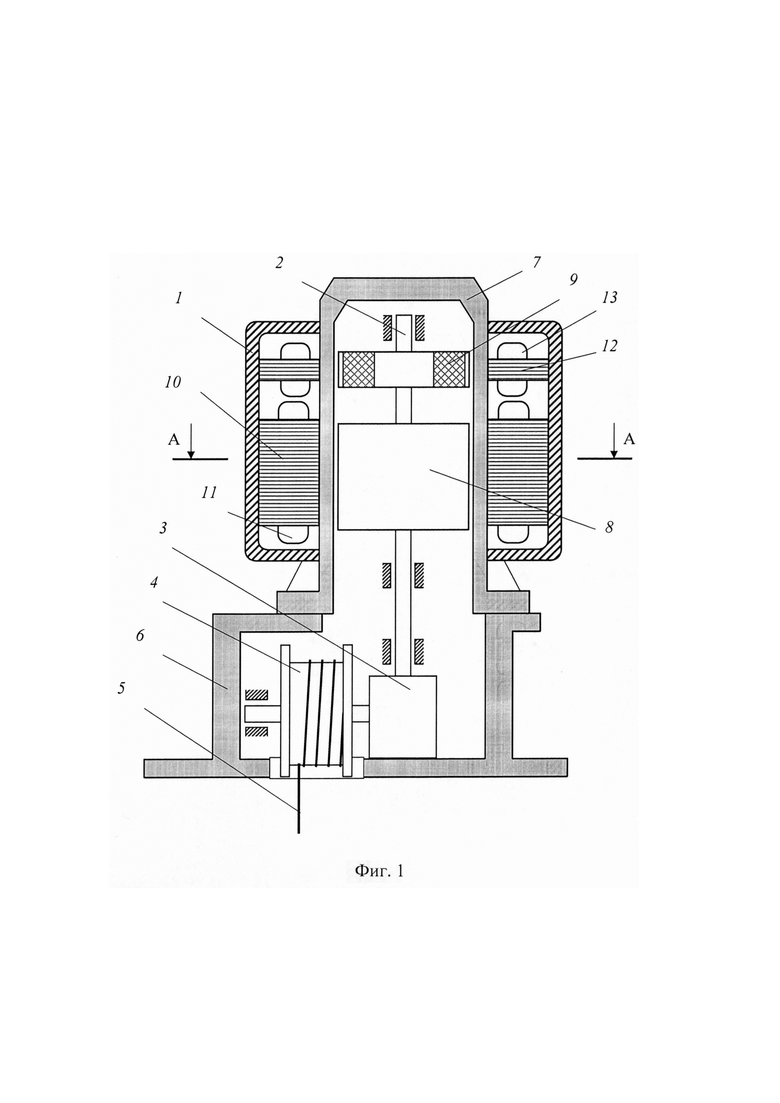
на фиг. 1 - механическая часть электропривода (вариант с преобразователем движения типа "барабан - трос");
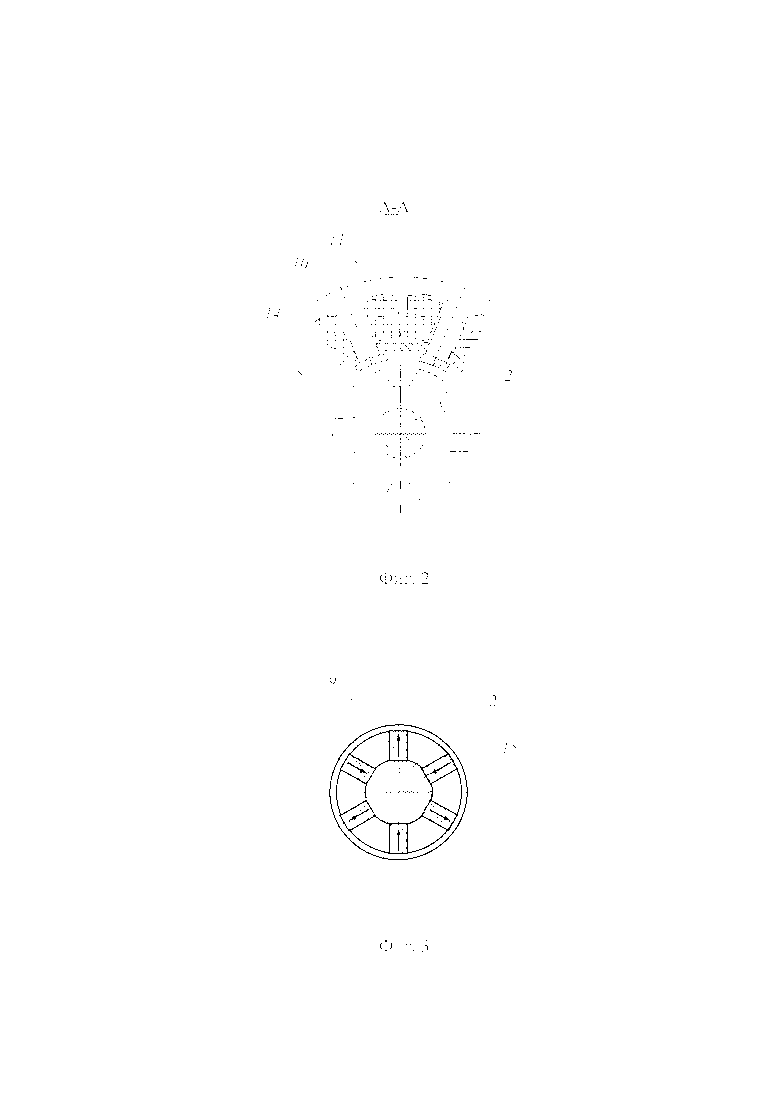
на фиг. 2 - зубчатый магнитопровод ротора (в поперечном сечении) с фрагментом магнитной системы статора синхронной машины;
на фиг. 3 - постоянные магниты ротора в поперечном сечении ротора;
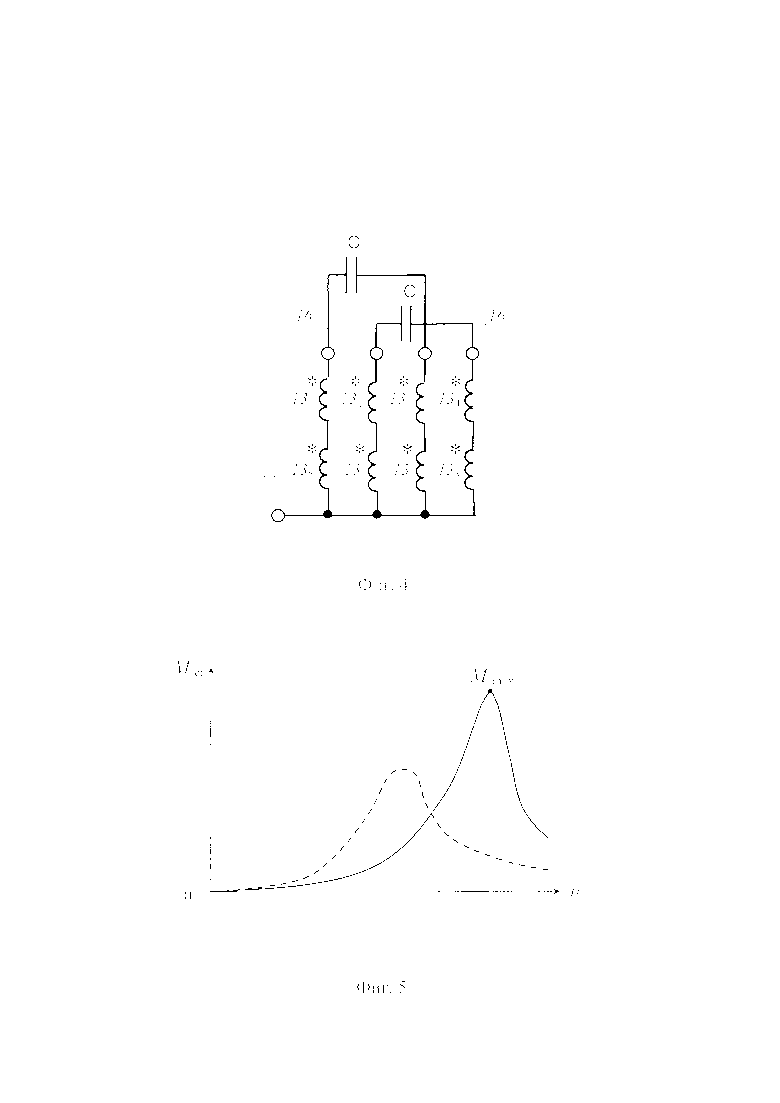
на фиг. 4 - электрическая схема соединения катушек обмотки дополнительного магнитопровода синхронной машины;
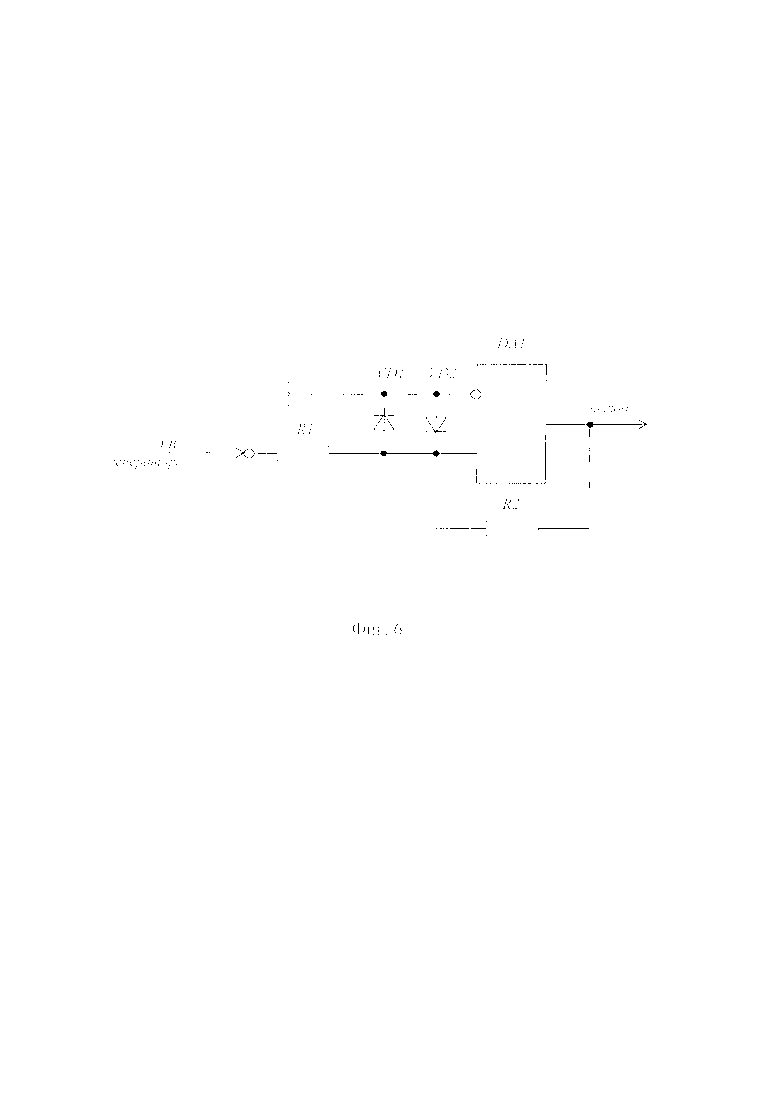
на фиг. 5 - характеристики тормозного (генераторного) электромагнитного момента синхронной машины предлагаемого электропривода и синхронной машины прототипа (экспериментальные кривые);
на фиг. 6 - электрическая схема компаратора, предназначенного для обработки электродвижущей силы (далее ЭДС) фазы дополнительной обмотки.
Электропривод (см. фиг. 1) содержит синхронную машину в корпусе 1, вал 2 ротора которого механически связан с регулирующим органом посредством преобразователя движения, предназначенного для передачи вращающего момента от веса регулирующего органа на вал 2 ротора. Преобразователь движения состоит из редуктора 3, соединенного с валом 2, и барабана 4 с тросом 5, прикрепленным к регулирующему органу (не показан). Узлы преобразователя движения и ротора синхронной машины находятся внутри корпуса 6 реактора, частью которого является герметизирующая труба 7 синхронной машины. Она отделяет полость ротора синхронной машины с жестко закрепленными на его валу 2 зубчатым магнитопроводом 8 (см. фиг. 1, 2) и постоянными магнитами 9 (см. фиг. 1, 3) от статора, которые смещены относительно зубчатого магнитопровода 8 в аксиальном направлении.
Статор синхронной машины состоит из установленных в корпусе 1 основного магнитопровода 10 с катушками 11 многофазной обмотки якоря, которая охватывает зубчатый магнитопровод 8 ротора, и дополнительного магнитопровода 12, расположенного рядом с основным магнитопроводом 10, со смещением вдоль оси вращения. В местах примыкания к статорным полюсам в герметизирующую трубу 7 вварены магнитомягкие вставки 14 (см. фиг. 2).
Дополнительный магнитопровод 12 охватывает постоянные магниты 9 на роторе. Относительно зубчатого магнитопровода 8 ротора они смещены в аксиальном направлении так, что помещаются внутри дополнительного магнитопровода 12 статора. Для повышения прочности магниты установлены внутри оболочки 15 из неферромагнитного материала (см. фиг. 3).
Катушки 11 основного магнитопровода 10 синхронной машины соединены в многофазную обмотку по любой известной схеме, например, в звезду, и подключены к источнику многофазного напряжения или тока через зажимы (не показаны). Катушки 13 дополнительного магнитопровода 12 соединены в многофазную обмотку, фазы которой сопряжены в звезду (см. фиг. 4). Индексам при цифровом обозначении катушек 13 дополнительной обмотки присвоены номера полюсных выступов дополнительного магнитопровода 12 статора, которые отсчитываются вдоль окружности статора, начиная от полюсного выступа, произвольно принятого за первый. Фазы обмотки дополнительного магнитопровода 12 подключены к зажимам фаз 16 и зажиму нулевой точки 17. Эти зажимы предназначены для подключения конденсаторов С (см. фиг. 4). Конденсаторы могут быть подключены к одной или нескольким фазам обмотки дополнительного магнитопровода: между зажимами фаз 16 или между фазным зажимом 16 и зажимом нулевой точки 17.
Электропривод работает следующим образом: при подключении многофазной обмотки якоря основного магнитопровода 10 синхронной машины к сети многофазного напряжения или тока создается вращающееся магнитное поле. Оно приводит во вращение зубчатый магнитопровод 8, а с ним и вал 2, с постоянными магнитами 9, на котором они закреплены. Вал 2 вращает барабан 4 посредством редуктора 3, и перемещает регулирующий орган через трос 5, один конец которого жестко закреплен на барабане.
Постоянные магниты 9 наводят ЭДС в катушках 13, в результате чего на зажимах 16 и 17 обмотки дополнительного магнитопровода наводится переменное напряжение. Под действием этого напряжения в цепях, замкнутых конденсаторами С, потечет ток. При небольшой частоте вращения, которая имеет место при вращении вала с магнитами посредством двигателя, этот ток невелик и не оказывает какого-либо заметного влияния на момент на валу 2.
При обесточивании обмотки основного магнитопровода синхронной машины ее вал 2 раскручивается под действием силы веса регулирующего органа, приложенной к валу через барабан 4 и редуктор. При этом постоянными магнитами 9, вращающимися вместе с валом, наводится ЭДС в обмотке дополнительного магнитопровода, состоящей из катушек 13, которая вызывает ток в цепи, замкнутой конденсаторами С (см. фиг. 4). Этот ток, первоначально небольшой, резко возрастает при достижении ротором частоты вращения, соответствующей заданной скорости установившегося опускания регулирующего органа (см. фиг. 5, сплошная кривая). На установившейся частоте вращения тормозной электромагнитный момент от взаимодействия поля постоянных магнитов с обмоткой дополнительного магнитопровода уравновешивает момент от веса регулирующего органа, приложенный через барабан и редуктор к валу 2 синхронной машины. Разгон регулирующего органа прекращается, и он опускается равномерно, без чрезмерных ударных нагрузок в конце хода. Для того чтобы устройство было способно достичь заданной установившейся скорости равномерного опускания, необходимо, чтобы частота ЭДС, наводимой в фазах обмотки дополнительного магнитопровода синхронной машины, была меньше величины, определяемой соотношением:
 оборотов в минуту,
оборотов в минуту,
где p - число пар полюсов обмотки дополнительного магнитопровода, L и С - индуктивность одной фазы обмотки и емкость подключенных к ее зажимам конденсаторов.
Этому значению частоты вращения ротора синхронной машины соответствует максимум тормозного электромагнитного момента Mтmах. Выше этого уровня ограничение скорости опускания регулирующего органа невозможно, поскольку при преодолении скорости опускания регулирующего органа выше значения, соответствующего максимуму момента под воздействием каких-либо случайных факторов, происходит резкое падение тормозного электромагнитного момента и неуправляемый разгон регулирующего органа. Для исключения неуправляемого разгона и повышения надежности работы устройства необходимо, чтобы скорость установившегося опускания регулирующего органа была максимально большой.
Амплитуда момента определяется величиной тока, которая, в свою очередь, определяется добротностью резонансных контуров, образованных фазами обмотки дополнительного магнитопровода и конденсаторами. В данном устройстве она выше, чем у прототипа за счет меньшего сопротивления более коротких катушек обмотки дополнительного магнитопровода, поскольку они намотаны не на всю длину синхронной машины, а только на ее дополнительный магнитопровод.
В силу большей добротности резонансных контуров предлагаемое устройство обладает большим быстродействием и функциональной надежностью по сравнению с прототипом. Большая функциональная надежность обеспечивается за счет более интенсивного разгона на участке разгона регулирующего органа, так как тормозной момент от действия тока обмотки дополнительного магнитопровода на начальном участке в предлагаемом устройстве меньше, чем у прототипа, а на участке ограничения скорости опускания регулирующего органа этот момент больше, чем у прототипа. Данный вывод подтверждается экспериментальными характеристиками тормозного момента (см. фиг. 5), где сплошная линия - характеристика предлагаемого устройства, пунктирная линия - характеристика прототипа, n - частота вращения ротора.
Благодаря отсутствию общих магнитных цепей и электрических соединений с катушками 11 обмотки якоря синхронной машины, по которым протекает силовой ток обмотки якоря, предлагаемое устройство может быть использовано для целей индикации положения ротора, а с ним и положения регулирующего органа. Для этого одна или несколько фаз цепи из катушек дополнительной обмотки (см. фиг. 4) соединяется с входом компаратора, схема которого приведена на фиг. 6, по одному на каждую фазу, выход которого соединен со счетчиком импульсов (не показан). Счетчик отсчитывает количество импульсов, соответствующее фактически отработанному угловому положению ротора, а значит, и перемещению регулирующего органа от исходного положения, например, от положения на нижнем упоре. Подключение компаратора возможно как при наличии конденсаторов С, подключенных к фазам обмотки дополнительного магнитопровода 12, так и при их отсутствии.
Введение дополнительного канала индикации положения регулирующего органа повышает надежность работы привода.
Такое техническое решение обеспечивает повышенную надежность работы электропривода за счет увеличения скорости опускания регулирующего органа при обесточивании синхронной машины и увеличения максимума тормозного момента на скорости, превышающей частоту, соответствующую заданной скорости равномерного опускания регулирующего органа.
Такое техническое решение обеспечивает расширение функциональных возможностей электропривода за счет выполнения функции первичного датчика для определения положения регулирующего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2013 |
|
RU2533177C1 |
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| Синхронная машина | 2021 |
|
RU2759219C1 |
| ИНДУКТОРНАЯ МАШИНА | 2010 |
|
RU2422971C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1991 |
|
RU2030798C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1632237A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| Электрическая синхронная машина | 1981 |
|
SU1032552A1 |
| Синхронизированная аксиальная двухвходовая генераторная установка | 2017 |
|
RU2647708C1 |
Электромеханический преобразователь для электропривода вертикального перемещения регулирующего органа относится к электротехнике и может быть использован в системах автоматического управления положением и перемещением регулирующего органа ядерного реактора. Техническим результатом является повышение надежности работы электропривода за счет увеличения скорости опускания регулирующего органа при обесточивании синхронной машины и увеличения максимума тормозного момента на скорости, превышающей частоту, соответствующую заданной скорости равномерного опускания регулирующего органа, а также расширение функциональных возможностей электропривода за счет выполнения функции первичного датчика для определения положения регулирующего органа. Электромеханический преобразователь содержит синхронную машину с многофазной обмоткой якоря на статоре, внутри которого расположен ротор с жестко закрепленными на его валу зубчатым магнитопроводом и постоянными магнитами, смещенными относительно зубчатого магнитопровода в аксиальном направлении, образующими по окружности полюса чередующейся полярности, снабженной зажимами для подключения конденсаторов, и преобразователь движения, предназначенный для передачи вращающего момента от веса регулирующего органа на вал ротора синхронной машины, имеется статор синхронной машины, снабженный дополнительным магнитопроводом с обмоткой, соединенной с зажимами для подключения конденсаторов в одной или нескольких фазах, при этом дополнительный магнитопровод охватывает постоянные магниты на роторе. 1 з.п. ф-лы, 6 ил.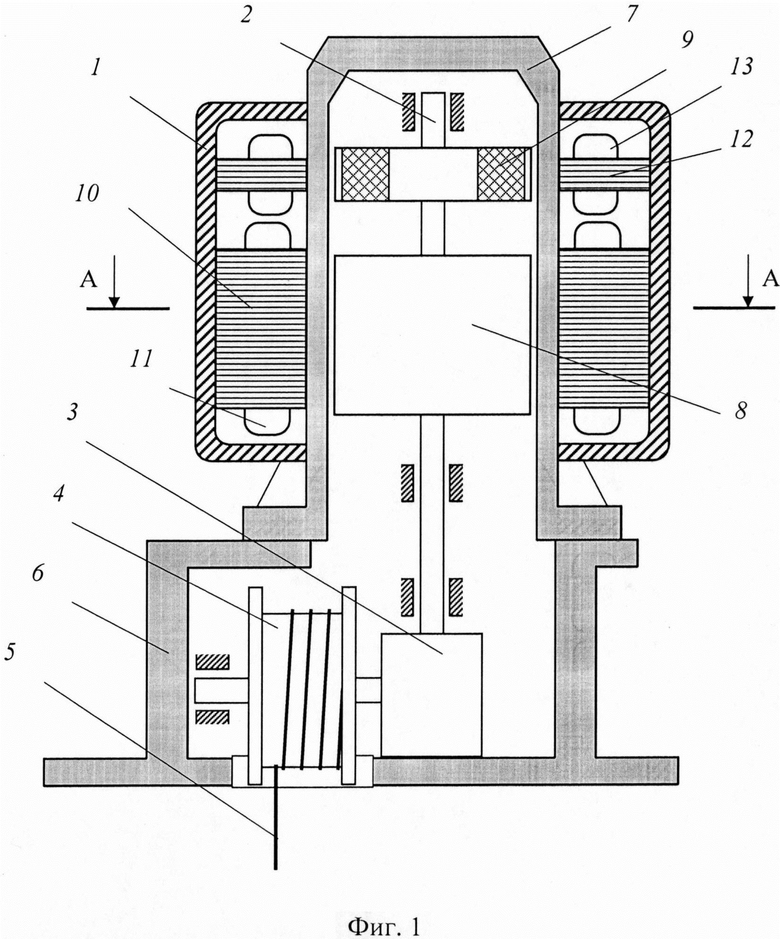
1. Электромеханический преобразователь для электропривода вертикального перемещения регулирующего органа, содержащий синхронную машину с многофазной обмоткой якоря на статоре, внутри которого расположен ротор с жестко закрепленным на его валу зубчатым магнитопроводом и постоянными магнитами, смещенными относительно зубчатого магнитопровода в аксиальном направлении, образующими по окружности полюса чередующейся полярности, снабженной зажимами для подключения конденсаторов, и преобразователь движения, предназначенный для передачи вращающего момента от веса регулирующего органа на вал ротора синхронной машины, отличающийся тем, что статор синхронной машины снабжен дополнительным магнитопроводом с обмоткой, соединенной с зажимами для подключения конденсаторов в одной или нескольких фазах, при этом дополнительный магнитопровод охватывает постоянные магниты на роторе, причем требуемая установившаяся частота вращения ротора под действием веса регулирующего органа при обесточенной многофазной обмотке якоря составляет менее  оборотов в минуту, где р - число пар полюсов обмотки дополнительного магнитопровода, L и С - индуктивность одной фазы обмотки и емкость подключенных к ее зажимам конденсаторов.
оборотов в минуту, где р - число пар полюсов обмотки дополнительного магнитопровода, L и С - индуктивность одной фазы обмотки и емкость подключенных к ее зажимам конденсаторов.
2. Электромеханический преобразователь по п. 1, отличающийся тем, что обмотка дополнительного магнитопровода снабжена зажимами для подключения компаратора в одной или нескольких фазах.
| РЕАКТИВНАЯ МАШИНА | 2010 |
|
RU2412519C1 |
| SU 1454208 A1, 20.11.1999 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2441308C1 |
| Машина для обрезки сучьев с поваленных деревьев | 1975 |
|
SU649577A1 |
| US 6114789 A1, 05.09.2000. | |||

